Clear Sky Science · pt
Interface sensorial afetiva biomimética com pelos
Por que ensinar toque às máquinas importa
Costumamos avaliar como alguém se sente pelo modo como nos toca: um tapinha rápido, um empurrão tenso, um afago lento e reconfortante. Os robôs e dispositivos inteligentes de hoje conseguem ver e ouvir, mas em grande parte perdem esse canal emocional rico. Este artigo apresenta um novo tipo de pele eletrônica macia e peluda que permite às máquinas perceber não apenas que estão sendo tocadas, mas como esse toque se sente emocionalmente, abrindo caminho para interações mais delicadas e naturais entre pessoas e IA.
Um novo tipo de pele artificial peluda
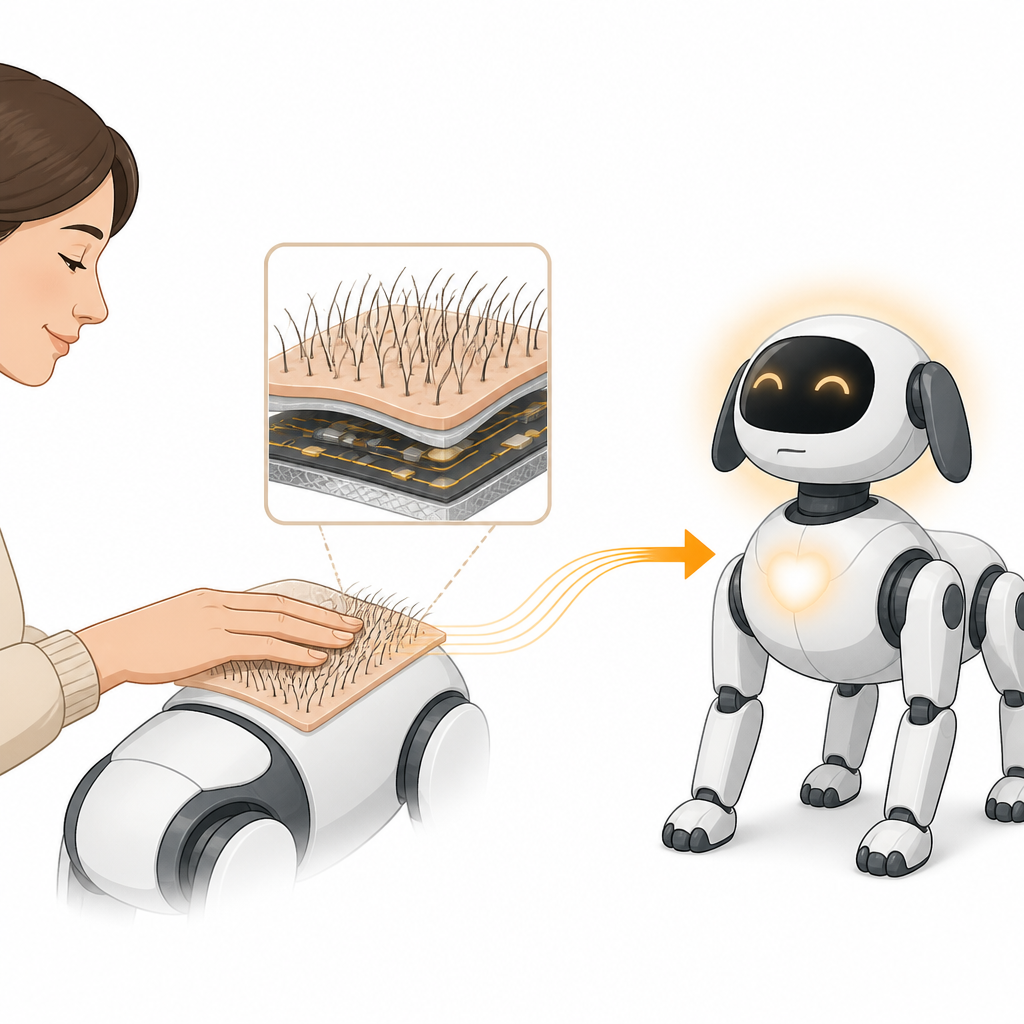
Os pesquisadores criaram um sensor flexível, chamado BioAI2, que imita os pelos finos da pele de mamíferos. Nos animais, pequenas terminações nervosas enroladas em torno das raízes dos pelos detectam carícias leves e enviam sinais associados ao conforto e ao vínculo social. O BioAI2 copia essa ideia com um leito de pelos de silicone macio sobre uma malha condutora fina e altamente uniforme. Quando um dedo passa pelos pelos, eles se dobram e se recuperam, gerando pulsos elétricos breves sem baterias ou energia externa. Esses pulsos carregam informação sobre onde o toque ocorre, quão forte é e quão rápido se move, de forma semelhante aos sinais de nossas próprias fibras nervosas sensíveis ao toque.
De carícias suaves a sinais semelhantes aos do cérebro
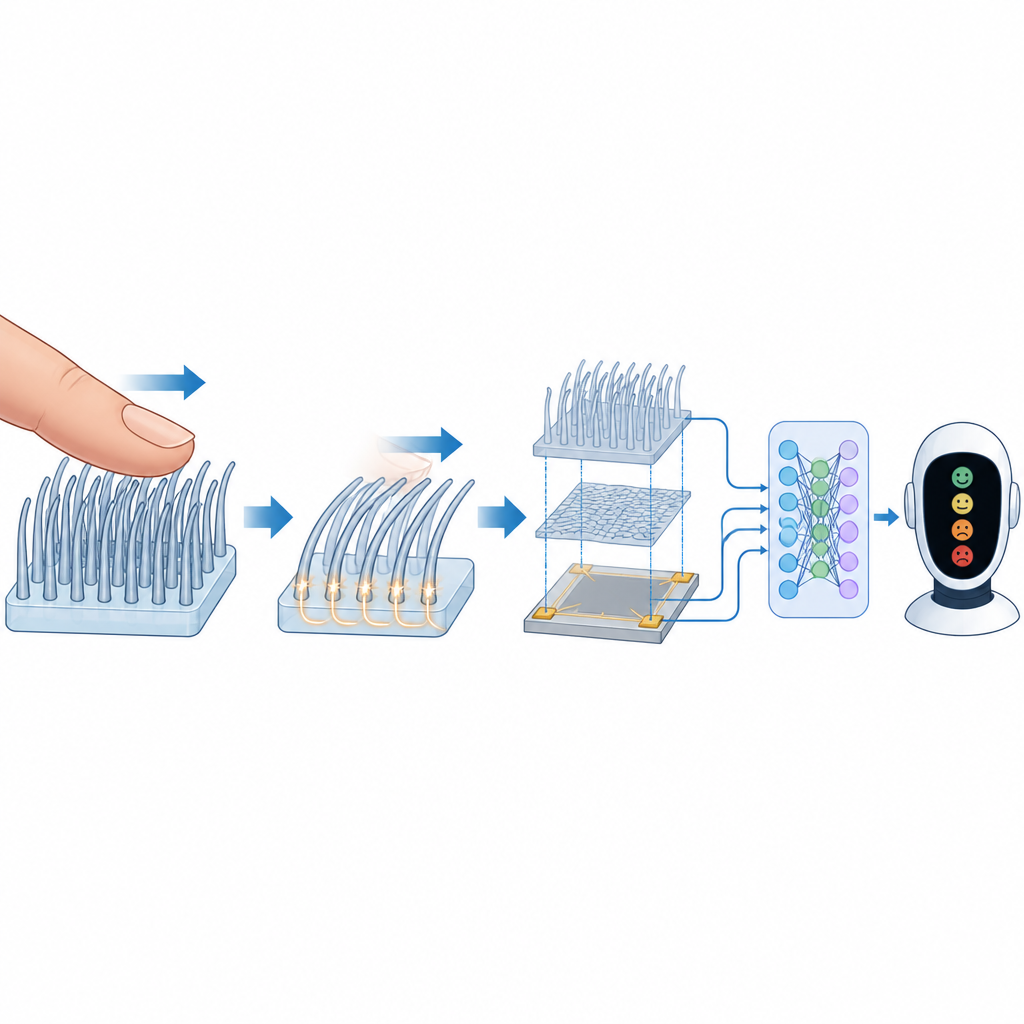
Na superfície interna, o dispositivo depende de um efeito físico simples: quando dois materiais diferentes se tocam e se separam, pequenas cargas se movimentam entre eles. A pele humana e os pelos de silicone trocam carga enquanto o dedo desliza, e a malha subjacente coleta essas mudanças como uma sequência de picos agudos. Ao projetar cuidadosamente pelos de duas alturas e espaçamentos diferentes, a equipe tornou o sensor especialmente sensível a forças leves, mantendo a capacidade de lidar com toques mais fortes. Eles descobriram que a taxa de picos elétricos aumenta com a velocidade do deslizamento até um ponto ideal e depois diminui, correspondendo a como certos nervos táteis humanos respondem melhor a velocidades de afago. Isso faz com que a saída não seja apenas um sinal técnico, mas uma representação direta de como nossos corpos codificam o toque agradável.
Vendo força, localização e movimento ao mesmo tempo
Diferente de muitos sensores de toque anteriores que medem apenas pressão em pontos fixos, o BioAI2 lê vários aspectos do toque a partir de uma única lâmina fina. Quatro eletrodos nos cantos coletam pulsos cuja intensidade e temporização variam conforme onde o dedo pousa e como ele se move. Os pesquisadores desenvolveram um método matemático de mapeamento baseado em curvas suavizadas de "isolinhas" para que até toques perto das bordas possam ser localizados com precisão em uma grande área. O desenho peludo e pontiagudo também torna cada pulso extremamente curto no tempo, permitindo ao sistema separar toques sobrepostos de múltiplos dedos e reconstruir trajetórias complexas, como letras ou formas desenhadas na superfície.
Ensinando máquinas a ler sentimentos pelo toque
Para vincular esses padrões a emoções humanas, voluntários assistiram a trechos de filmes projetados para evocar estados positivos, neutros ou negativos e então realizaram gestos cotidianos como afagos, batidas e tapas na superfície peluda. O dispositivo capturou milhares de exemplos, e a equipe converteu os sinais brutos em imagens coloridas tempo-frequência, adicionando indicadores de velocidade e força do gesto. Um sistema de deep learning aprendeu a reconhecer tanto o tipo de gesto quanto o provável tom emocional por trás dele. Entre pessoas diferentes, identificou corretamente o gesto quase sempre e rotulou o estado emocional com mais de 80% de precisão, mostrando que pistas emocionais no toque podem ser decodificadas a partir dessa pele artificial.
Fechando o ciclo emocional com robôs
Por fim, os pesquisadores combinaram a pele peluda com um robô em forma de cachorro e um grande modelo de linguagem similar a chatbots modernos. A pele percebeu como o dono acariciava o robô enquanto o modelo de linguagem recebia contexto adicional, como a situação e a relação entre humano e robô. Juntos, eles escolheram ações expressivas apropriadas, como pular, descansar ou se enroscar, para corresponder ao humor detectado. Isso cria um ciclo completo: uma pessoa expressa emoção pelo toque, a máquina interpreta tanto o toque quanto o contexto e então responde de maneira que pareça emocionalmente adequada.
O que isso significa para relações futuras entre humanos e máquinas
Este trabalho mostra que uma pele eletrônica fina, macia e coberta de pelos pode transformar padrões sutis de toque em sinais que máquinas podem usar para perceber nossos sentimentos. Ao combinar esse sensor com IA moderna, robôs e dispositivos podem ir além de pressionar botões rígidos rumo a interações que se assemelham ao conforto de acariciar um animal ou segurar uma mão. Embora o sistema ainda precise de superfícies maiores, mais dados e outros sentidos como temperatura para igualar plenamente o toque humano, ele aponta para um futuro em que a tecnologia pode responder ao nosso estado emocional através do toque, tornando companheiros digitais, robôs assistivos e ferramentas terapêuticas mais sensíveis e acolhedores.
Citação: Hong, J., Xiao, Y., Chen, Y. et al. Biomimetic hairy affective-touch sensory AI interface. Nat Commun 17, 4146 (2026). https://doi.org/10.1038/s41467-026-70334-1
Palavras-chave: toque afetivo, pele eletrônica, interação humano-robô, sensoriamento tátil, reconhecimento de emoção