Clear Sky Science · it
Interfaccia sensoriale AI tatto-affettivo biomimetica con peli
Perché insegnare il tatto alle macchine è importante
Spesso giudichiamo lo stato d’animo di una persona dal modo in cui ci tocca: una pacca veloce, una spinta tesa, una carezza lenta e rassicurante. I robot e i dispositivi intelligenti di oggi possono vedere e sentire suoni, ma in gran parte perdono questo ricco canale emotivo. Questo articolo presenta un nuovo tipo di pelle elettronica morbida e pelosa che permette alle macchine di percepire non solo che vengono toccate, ma come quel tocco si manifesta emotivamente, aprendo la strada a interazioni più gentili e naturali tra persone e IA.
Un nuovo tipo di pelle artificiale pelosa
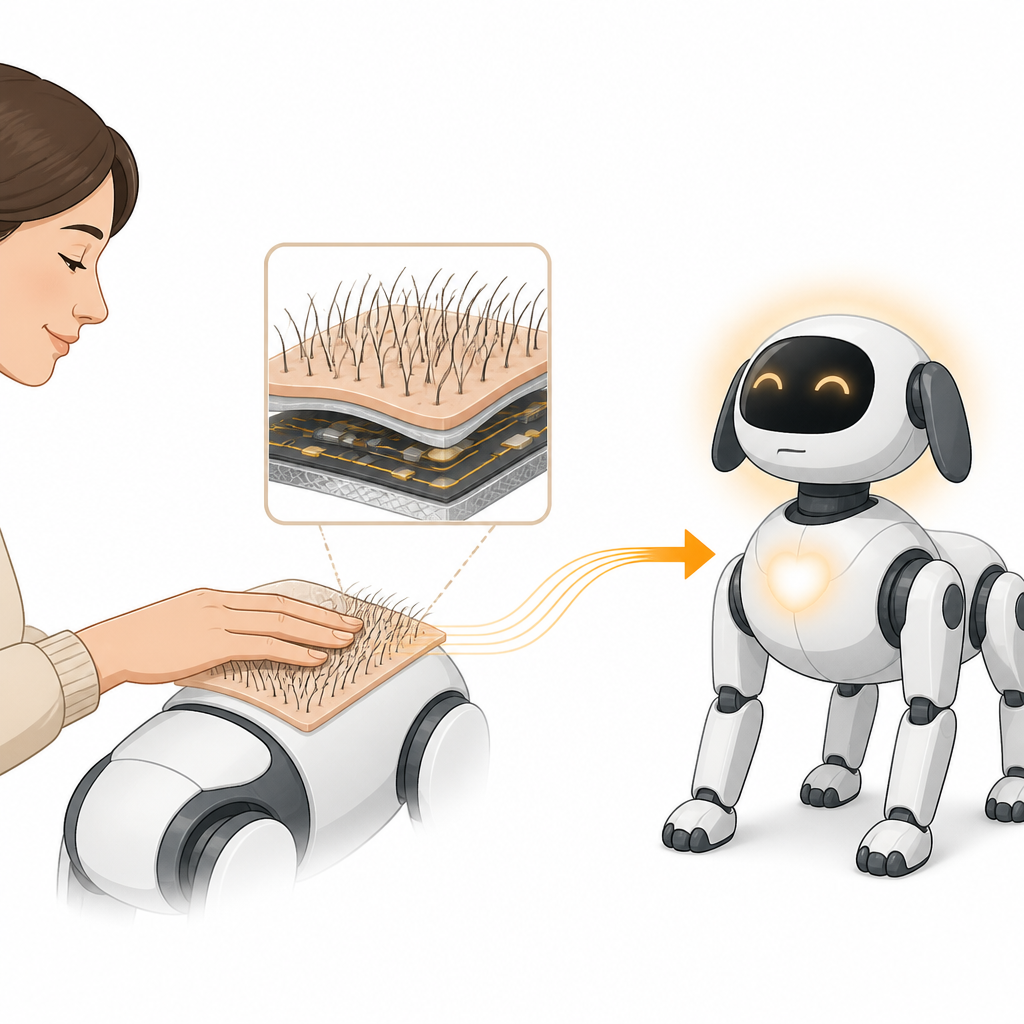
I ricercatori hanno creato un sensore flessibile, chiamato BioAI2, che imita i peli fini della pelle dei mammiferi. Negli animali, piccole terminazioni nervose avvolgono le radici dei peli per rilevare carezze leggere e inviare segnali associati al comfort e al legame sociale. BioAI2 riproduce questa idea con un letto di peli in silicone morbido posto su una sottile e altamente uniforme rete conduttiva. Quando un dito sfiora i peli, questi si piegano e rimbalzano, generando brevi impulsi elettrici senza batterie o alimentazione esterna. Questi impulsi trasportano informazioni su dove avviene il contatto, quanto è forte e quanto velocemente si muove, proprio come i segnali delle nostre fibre nervose tattili.
Dalle carezze ai segnali simili a quelli cerebrali
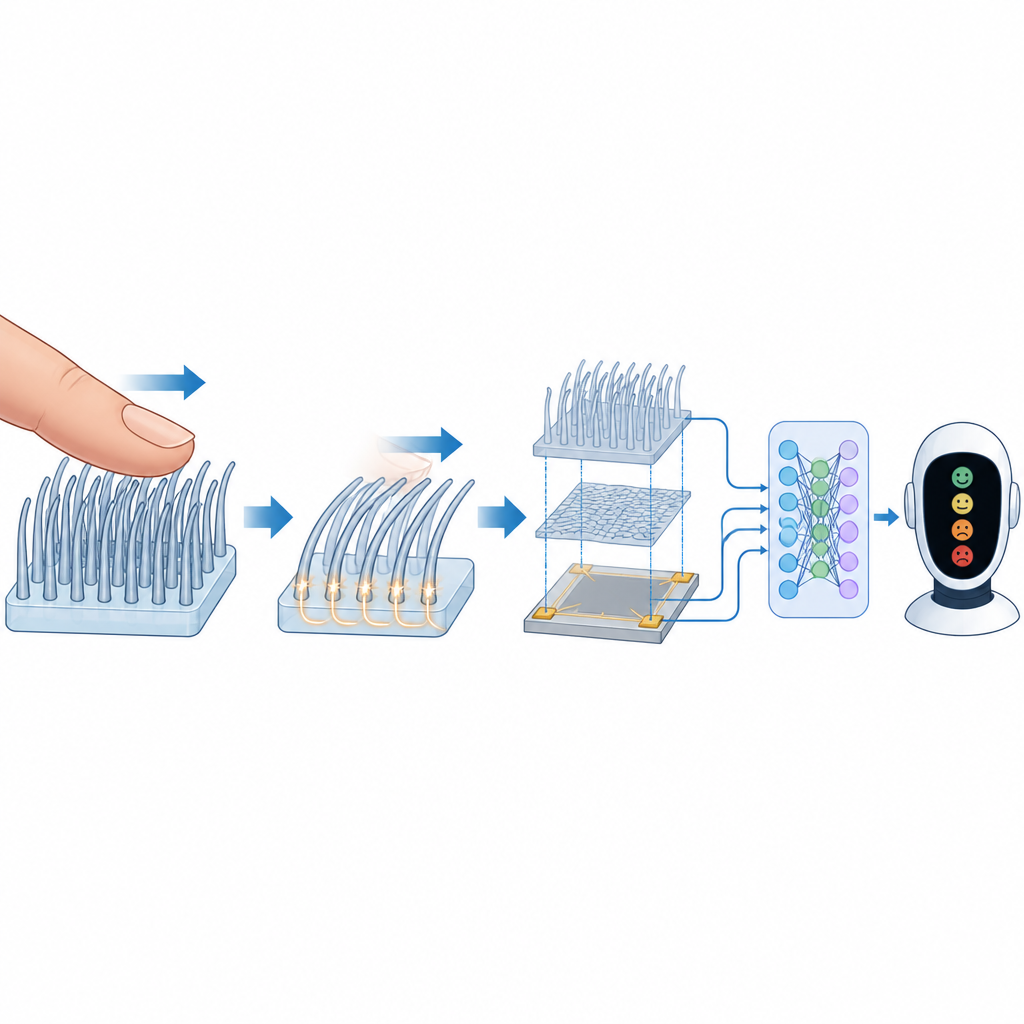
Sotto la superficie, il dispositivo sfrutta un effetto fisico semplice: quando due materiali diversi si toccano e si separano, si spostano piccole cariche. La pelle umana e i peli in silicone scambiano carica mentre il dito scivola, e la rete sottostante raccoglie questi cambiamenti sotto forma di una serie di picchi molto netti. Progettando con cura peli di due altezze e spaziature differenti, il team ha reso il sensore particolarmente sensibile alle forze leggere pur sopportando pressioni più forti. Hanno osservato che la frequenza degli impulsi elettrici aumenta con la velocità dello scorrimento fino a un punto ottimale, per poi diminuire, rispecchiando il comportamento di alcuni nervi tattili umani che rispondono meglio a velocità di carezza. Ciò rende l’output non solo un segnale tecnico, ma un sostituto diretto del modo in cui i nostri corpi codificano il tatto piacevole.
Vedere forza, posizione e movimento insieme
A differenza di molti sensori tattili precedenti che misurano solo la pressione in punti fissi, BioAI2 legge diversi aspetti del tocco da un unico foglio sottile. Quattro elettrodi agli angoli raccolgono impulsi la cui intensità e temporizzazione variano a seconda di dove il dito tocca e di come si muove. I ricercatori hanno sviluppato un metodo matematico basato su curve lisce «isoline» in modo che anche i tocchi vicino ai bordi possano essere localizzati con grande precisione su un’ampia area. Il design con peli appuntiti rende inoltre ogni impulso estremamente breve nel tempo, permettendo al sistema di separare tocchi sovrapposti di più dita e ricostruire percorsi complessi, come lettere o forme tracciate sulla superficie.
Insegnare alle macchine a leggere le emozioni dal tatto
Per collegare questi pattern alle emozioni umane, i volontari hanno visto clip filmate progettate per suscitare stati d’animo positivi, neutri o negativi, quindi hanno eseguito gesti quotidiani come carezze, colpetti e schiaffi sulla superficie pelosa. Il dispositivo ha catturato migliaia di esempi, e il team ha convertito i segnali grezzi in immagini tempo-frequenza colorate, aggiungendo indicatori di velocità e forza della carezza. Un sistema di deep learning ha imparato a riconoscere sia il tipo di gesto sia il probabile tono emotivo sottostante. Tra persone diverse, ha identificato correttamente il gesto quasi sempre e ha etichettato lo stato emotivo con oltre l’80% di accuratezza, dimostrando che gli indizi emotivi nel tocco possono essere decodificati da questa pelle artificiale.
Chiudere il ciclo emotivo con i robot
Infine, i ricercatori hanno combinato la pelle pelosa con un cane robot e un grande modello di linguaggio simile agli attuali chatbot. La pelle rilevava come il proprietario accarezzava il robot mentre il modello di linguaggio riceveva contesto aggiuntivo come la situazione e la relazione tra umano e robot. Insieme, hanno scelto azioni espressive appropriate, come saltare, riposarsi o annusare, per abbinarsi all’umore rilevato. Questo crea un ciclo completo: una persona esprime emozione attraverso il tatto, la macchina interpreta sia il tocco sia il contesto e poi risponde in modo emotivamente coerente.
Cosa significa questo per le future relazioni uomo-macchina
Questo lavoro mostra che una pelle elettronica sottile, morbida e coperta di peli può trasformare pattern sottili di tocco in segnali che le macchine possono usare per percepire i nostri sentimenti. Integrando questo sensore con l’IA moderna, robot e dispositivi possono andare oltre i rigidi pulsanti verso interazioni che somigliano al conforto di accarezzare un animale o tenere una mano. Sebbene il sistema richieda ancora superfici più ampie, più dati e altri sensi come la temperatura per eguagliare pienamente il tatto umano, indica una direzione futura in cui la tecnologia può rispondere al nostro stato emotivo tramite il tatto, rendendo compagni digitali, robot assistivi e strumenti terapeutici più sensibili e di supporto.
Citazione: Hong, J., Xiao, Y., Chen, Y. et al. Biomimetic hairy affective-touch sensory AI interface. Nat Commun 17, 4146 (2026). https://doi.org/10.1038/s41467-026-70334-1
Parole chiave: tocco affettivo, pelle elettronica, interazione uomo-robot, sensori tattili, riconoscimento delle emozioni