Clear Sky Science · pl
Biomimetyczny włochaty interfejs dotykowy AI
Dlaczego nauczenie maszyn odczuwania ma znaczenie
Często oceniamy, co ktoś czuje, po sposobie, w jaki nas dotyka: szybkie poklepanie, napięte odepchnięcie, powolne uspokajające pociągnięcie. Dzisiejsze roboty i urządzenia mogą widzieć i słyszeć, ale w dużej mierze nie korzystają z tego bogatego kanału emocjonalnego. Artykuł przedstawia nowy rodzaj miękkiej, włochatej elektronicznej skóry, która pozwala maszynom rozpoznawać nie tylko fakt dotyku, lecz także jego emocjonalny wydźwięk, otwierając drzwi do łagodniejszych, bardziej naturalnych interakcji między ludźmi a AI.
Nowy rodzaj sztucznej włochatej skóry
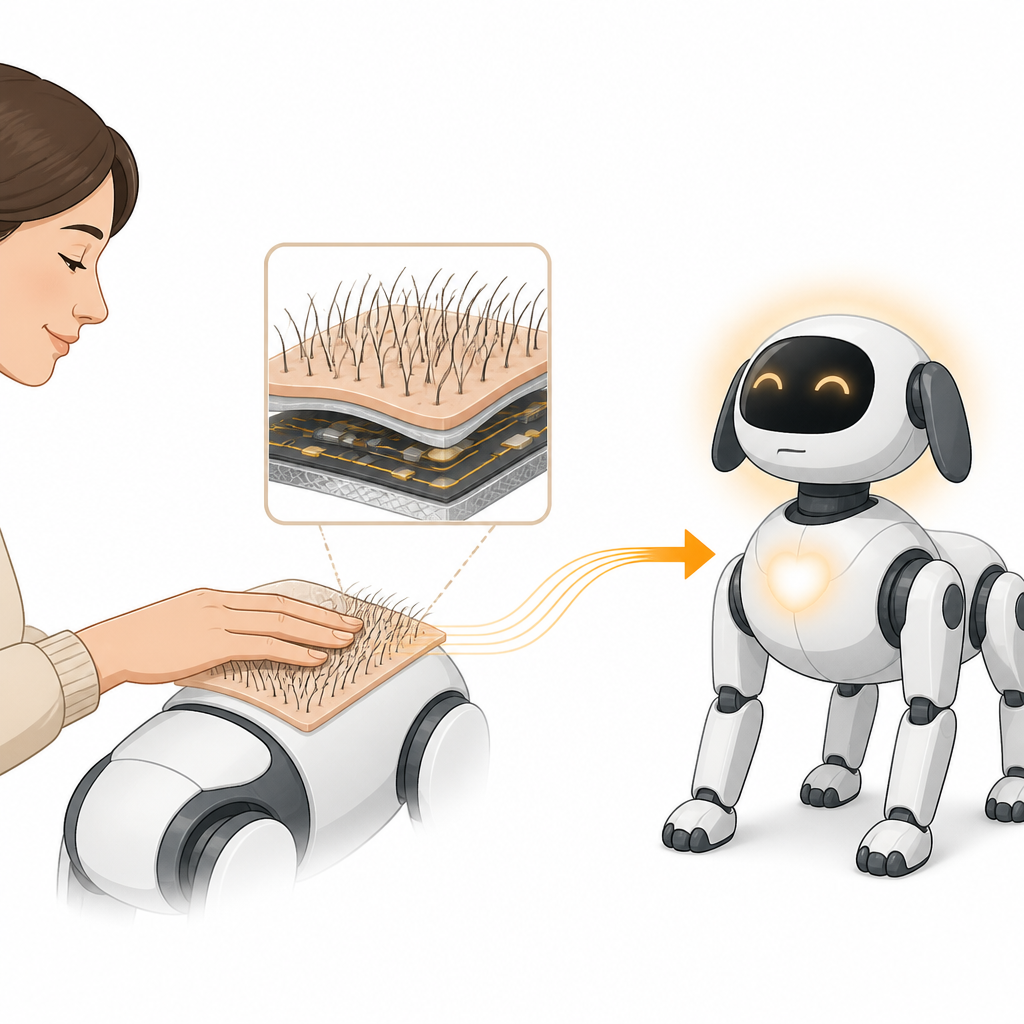
Naukowcy stworzyli elastyczny czujnik nazwany BioAI2, który naśladuje cienkie włoski na skórze ssaków. U zwierząt drobne zakończenia nerwowe owinięte wokół cebulek włosów wyczuwają lekkie pociągnięcia i wysyłają sygnały związane z komfortem i więzią społeczną. BioAI2 odwzorowuje ten pomysł za pomocą warstwy miękkich silikonowych włosków osadzonych na cienkiej, bardzo jednorodnej przewodzącej siatce. Gdy palec przesuwa się po włoskach, uginają się i sprężyście wracają, generując krótkie impulsy elektryczne bez baterii czy zewnętrznego zasilania. Impulsy te niosą informacje o miejscu dotyku, sile nacisku i prędkości ruchu — podobnie jak sygnały z naszych własnych włókien dotykowych.
Od delikatnych pociągnięć do sygnałów przypominających mózg
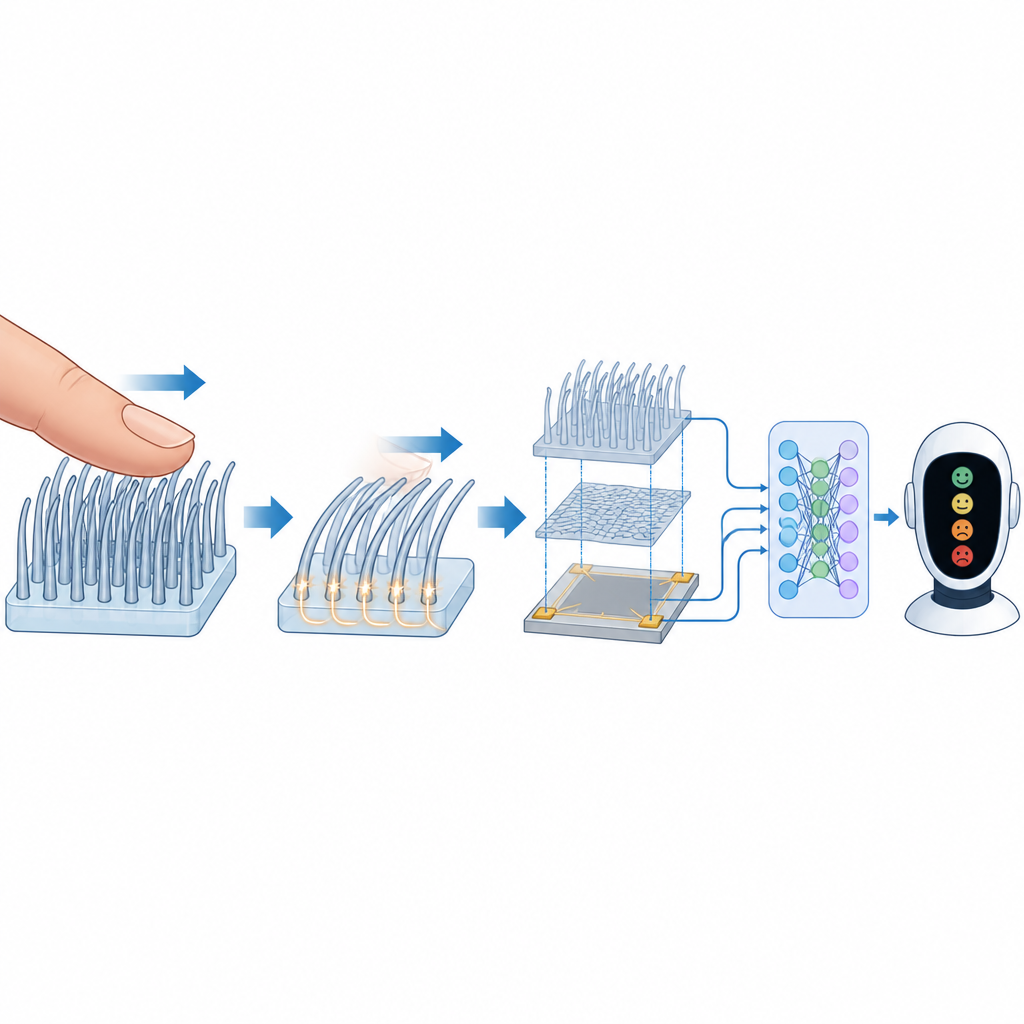
Pod powierzchnią urządzenie opiera się na prostym zjawisku fizycznym: gdy dwa różne materiały stykają się i rozdzielają, przemieszczają się niewielkie ładunki. Ludzka skóra i silikonowe włoski wymieniają ładunek podczas przesuwania palca, a leżąca poniżej siatka zbiera te zmiany jako serię ostrych impulsów. Poprzez staranne zaprojektowanie włosków o dwóch różnych wysokościach i odstępach, zespół uczynił czujnik szczególnie czułym na lekkie siły, jednocześnie zachowując zdolność do rejestrowania mocniejszych nacisków. Zaobserwowano, że częstotliwość impulsów elektrycznych rośnie wraz z prędkością głaskania do pewnego optimum, a potem spada — co odpowiada temu, jak niektóre ludzkie nerwy dotykowe najlepiej reagują na prędkości przypominające pieszczotę. Dzięki temu wyjście urządzenia to nie tylko sygnał techniczny, lecz bezpośredni odpowiednik sposobu, w jaki nasze ciało koduje przyjemny dotyk.
Widzenie siły, lokalizacji i ruchu jednocześnie
W przeciwieństwie do wielu wcześniejszych czujników dotyku mierzących wyłącznie nacisk w stałych punktach, BioAI2 odczytuje kilka aspektów dotyku z jednej cienkiej warstwy. Cztery elektrody w rogach zbierają impulsy, których natężenie i czas zależą od miejsca zetknięcia palca i charakteru ruchu. Naukowcy opracowali matematyczną metodę mapowania opartą na gładkich krzywych „izolin”, dzięki czemu nawet dotknięcia przy krawędziach mogą być bardzo dokładnie zlokalizowane na dużej powierzchni. Włochata, kolczasta struktura sprawia też, że każdy impuls jest wyjątkowo krótki w czasie, co pozwala systemowi rozdzielać nakładające się dotyki wielu palców i odtwarzać złożone ścieżki, takie jak litery czy kształty rysowane na powierzchni.
Nauczanie maszyn odczytywania uczuć z dotyku
Aby powiązać te wzorce z emocjami ludzi, ochotnicy oglądali klipy filmowe zaprojektowane tak, by wywołać nastrój pozytywny, neutralny lub negatywny, a następnie wykonywali codzienne gesty — głaskanie, pukanie, klapsy — na włochatej powierzchni. Urządzenie zarejestrowało tysiące przykładów, a zespół przekształcił surowe sygnały w kolorowe obrazy czasowo‑częstotliwościowe, dodając wskaźniki prędkości i siły pociągnięć. System głębokiego uczenia nauczył się rozpoznawać zarówno typ gestu, jak i prawdopodobny ton emocjonalny za nim stojący. Między różnymi osobami prawidłowo identyfikował gest niemal zawsze, a oznaczanie stanu emocjonalnego osiągnęło ponad 80 procent dokładności, pokazując, że emocjonalne sygnały w dotyku można odczytać z tej sztucznej skóry.
Zamykanie pętli emocjonalnej z robotami
Na koniec badacze połączyli włochatą skórę z robotycznym psem i dużym modelem językowym podobnym do współczesnych chatbotów. Skóra wykrywała, jak właściciel głaska robota, podczas gdy model językowy otrzymywał dodatkowy kontekst, taki jak sytuacja i relacja między człowiekiem a robotem. Razem wybierały odpowiednie ekspresywne zachowania — skakanie, odpoczynek czy ocieranie się — dopasowane do wykrytego nastroju. Powstaje pełna pętla: osoba wyraża emocję poprzez dotyk, maszyna interpretuje zarówno dotyk, jak i kontekst, a następnie reaguje w sposób emocjonalnie adekwatny.
Co to oznacza dla przyszłych relacji człowieka z maszyną
Praca pokazuje, że cienka, miękka, pokryta włoskami elektroniczna skóra może przekształcać subtelne wzorce dotyku w sygnały, które maszyny mogą wykorzystać do wyczuwania naszych uczuć. Łącząc ten sensor z nowoczesną AI, roboty i urządzenia mogą wyjść poza sztywne naciśnięcia przycisków i zmierzać ku interakcjom przypominającym przyjemność głaskania zwierzęcia czy trzymania za rękę. Choć system wciąż potrzebuje większych powierzchni, więcej danych i dodatkowych zmysłów, jak temperatura, by w pełni dorównać ludzkiemu dotykowi, wskazuje drogę ku przyszłości, w której technologia może odpowiadać na nasz stan emocjonalny przez dotyk, sprawiając, że cyfrowi towarzysze, roboty asystujące i narzędzia terapeutyczne będą bardziej świadome i wspierające.
Cytowanie: Hong, J., Xiao, Y., Chen, Y. et al. Biomimetic hairy affective-touch sensory AI interface. Nat Commun 17, 4146 (2026). https://doi.org/10.1038/s41467-026-70334-1
Słowa kluczowe: dotyk afektywny, elektroniczna skóra, interakcja człowiek‑robot, czucie dotykowe, rozpoznawanie emocji