Clear Sky Science · he
ממשק חישה מגעית אפקטיבית מזוייפת על-פי ביומימטיקה
מדוע חשוב ללמד מכונות לגעת
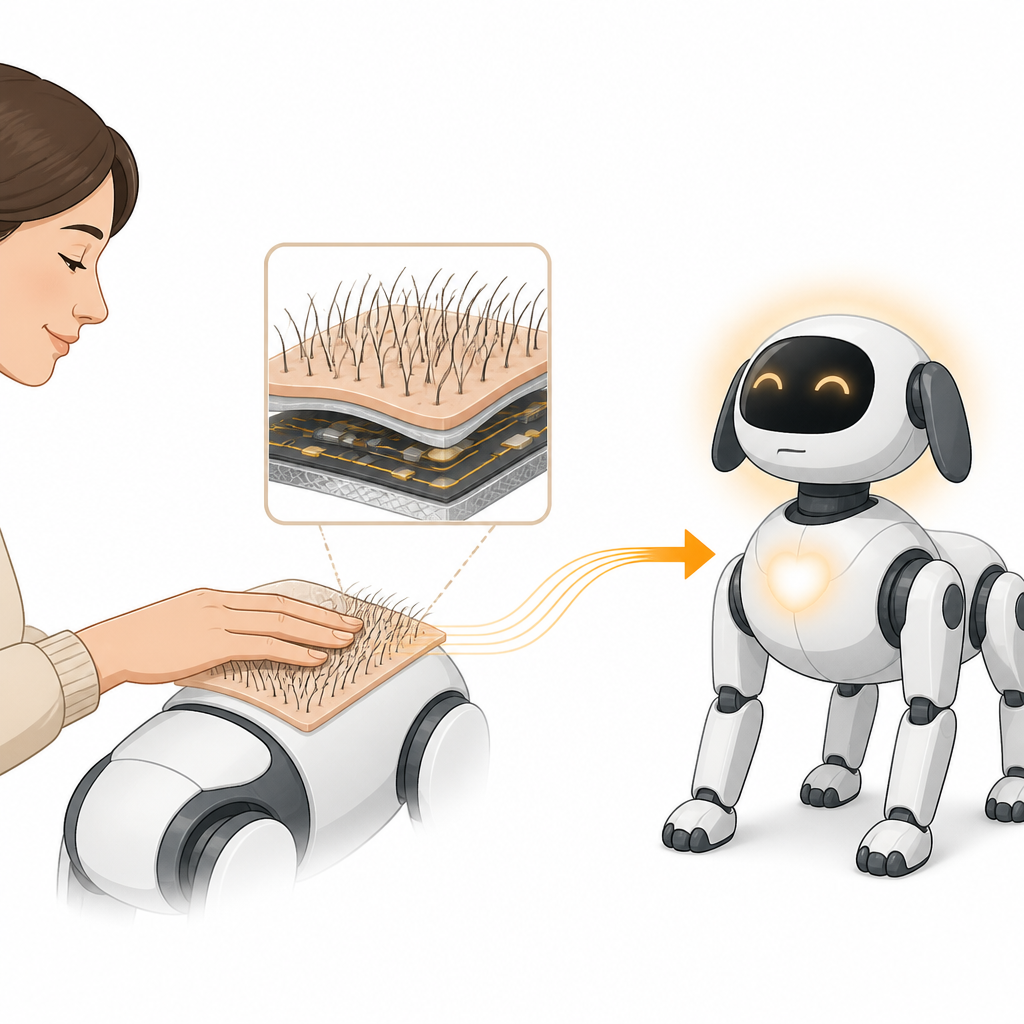
רובנו שופטים את מצבו הרגשי של אדם לפי הדרך שבה הוא נוגע בנו: טפיחה מהירה, דחיפה מתוחה או משיכה מרגיעה וארוכה. רובוטים ומכשירים חכמים של היום יכולים לראות ולשמוע, אך הם מפספסים ברובם את ערוץ הרגש העשיר הזה. המאמר מציג סוג חדש של עור אלקטרוני רך ומכוסה שערות שמאפשר למכונות לחוש לא רק את העובדה שהן נוגעות, אלא גם כיצד המגע נתפס רגשית — ובכך לפתוח פתח לאינטראקציות עדינות וטבעיות יותר בין אנשים ל-AI.
סוג חדש של עור מלאכותי שערתי
החוקרים יצרו חיישן גמיש, בשם BioAI2, שמחקה את השערות הדקות בעור של יונקים. בחיות, סופי עצב זעירים העוטפים שורשי שערות מזהים גירודים עדינים ושולחים אותות הקשורים לנוחות ולקשר חברתי. ה-BioAI2 מחקה רעיון זה עם שטח שערות סיליקוני רך היושב על רשת מוליכה דקה ואחידה מאוד. כאשר אצבע מחליקה על פני השערות, הן מתכופפות וקופצות חזרה, ויוצרות פלטות חשמליות קצרות ללא סוללות או אספקת כוח חיצונית. פלטות אלה מעבירות מידע על מיקום המגע, עוצמתו ומהירות התנועה — בדומה לאותות מסיבי החישה במגע שבגופנו.
ממשיכות עדויות עדינות לאותות דמויי־מוח
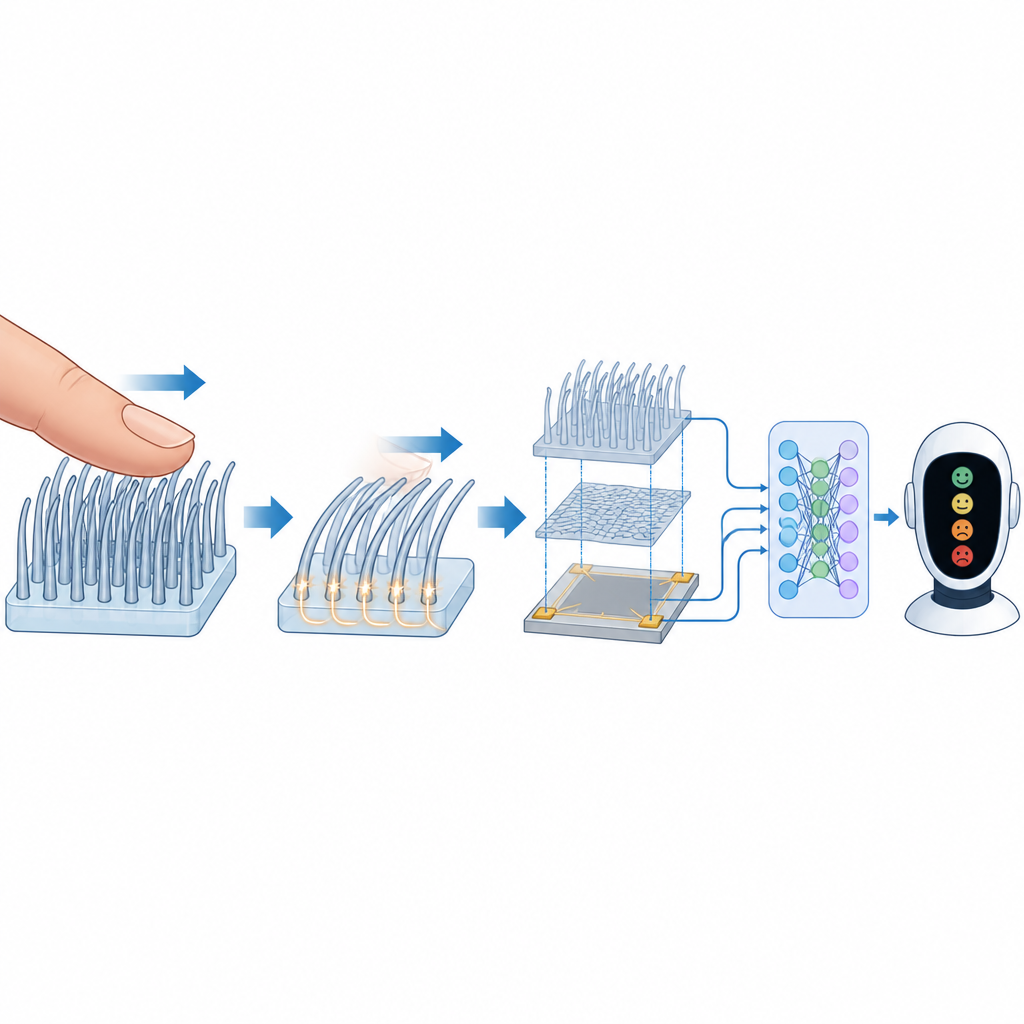
מתחת לפני השטח המכשיר נשען על אפקט פיזיקלי פשוט: כאשר שתי חומרים שונים באים במגע ומופרדים, מטענים זעירים עוברים ביניהם. עור אנושי והשערות הסיליקוניות מחליפים מטען בזמן החלקת האצבע, והרשת מתחת אוספת שינויים אלה כרצף של פיקים חדים. בעיצוב שערות בשני גבהים וריווח מדוקדק, הצוות עשה את החיישן רגיש במיוחד לכוחות עדינים ועדיין מסוגל להתמודד עם לחיצות חזקות יותר. הם גילו שקצב הפיקים החשמליים עולה עם מהירות המשיכה עד לנקודת שיא, ואז יורד — תבנית בהתאמה לתגובת קשרי המגע האנושיים שמעדיפים מהירויות קרובות לאלה של ליטוף. זה הופך את הפלט לא רק לאות טכני, אלא לייצוג ישיר של האופן שבו גופנו מקודד מגע מהנה.
לראות כוח, מיקום ותנועה בו־זמנית
בניגוד לחיישני מגע רבים שעד כה מדדו רק לחץ בנקודות קבועות, ה-BioAI2 קורא כמה היבטים של המגע מתוך שכבה דקה אחת. ארבעה אלקטרודות בפינות אוספות פיקים שעוצמתם ותזמונם משתנות לפי מקום וטיב התנועה של האצבע. החוקרים פיתחו שיטת מיפוי מתמטית מבוססת עקומות "איזוליין" חלקות כדי לזהות מיקום גם בקרבת קצוות בדיוק רב על פני שטח גדול. העיצוב השערתי היוצר פיקים קצרים מאוד בזמן מאפשר גם להפריד מגעים חופפים ממספר אצבעות ולבנות מחדש מסלולים מורכבים, כמו אותיות או צורות המצוירות על המשטח.
ללמד מכונות לקרוא רגשות מהמגע
כדי לקשר את הדפוסים האלה לרגשות אנושיים, מתנדבים צפו בקליפים שנועדו לעורר מצבי רוח חיוביים, ניטרליים או שליליים, ואז ביצעו מחוות יומיומיות כמו ליטופים, נקישות ולחיצות על המשטח השערתי. המכשיר קלט אלפי דוגמאות, והצוות המיר את האותות הגולמיים לתמונות זמן‑תדר צבעוניות, והוסיף מדדים של מהירות ועוצמת המשיכה. מערכת למידה עמוקה למדה לזהות הן את סוג המחווה והן את הטון הרגשי הסביר שמאחוריה. בקרב אנשים שונים היא זיהתה נכון את המחווה כמעט תמיד וסיווגה את המצב הרגשי בדיוק של מעל 80 אחוז, מה שמראה שניתן לפענח רמזים רגשיים מהמגע בעור מלאכותי זה.
סגירת הלולאה הרגשית עם רובוטים
בסופו של דבר שילבו החוקרים את העור השערתי עם כלב רובוטי ומודל שפה גדול הדומה לצ׳אבט־בוטים מודרניים. העור חשב כיצד הבעלים מחבב את הרובוט בעוד שמודל השפה קיבל הקשר נוסף כמו הסיטואציה והקשר בין האדם לרובוט. יחד הם בחרו פעולות הבעה מתאימות — קפיצה, מנוחה או ליטוף— כדי להתאים למצב הרוח שזוהה. כך נוצרה לולאה מלאה: אדם מבטא רגש דרך מגע, המכונה מפרשת הן את המגע והן את ההקשר, ואז מגיבה באופן שמרגיש תואם רגשית.
מה משמעות הדבר עבור מערכות יחסים עתידיות בין אדם למכונה
העבודה מראה שעור אלקטרוני דק, רך ומכוסה שערות יכול להפוך דפוסי מגע עדינים לאותות שמכונות יכולות להשתמש בהם כדי לחוש את רגשותינו. בשילוב עם בינה מלאכותית מודרנית, רובוטים ומכשירים יכולים להתקדם מעבר ללחיצות כפתור נוקשות לעבר אינטראקציות הדומות לנחמה של ליטוף חיה או אחיזת יד. אמנם המערכת עדיין זקוקה לשטחים גדולים יותר, ליותר נתונים ולחושים נוספים כמו חום כדי להתאים במלואו למגע האנושי, אך היא מצביעה על עתיד שבו טכנולוגיה תוכל להגיב למצב הרגשי שלנו דרך מגע, ולהפוך ללוויה דיגיטלית, רובוטים מסייעים וכלים תרפויטיים להרגיש מ�כירים ותומכים יותר.
ציטוט: Hong, J., Xiao, Y., Chen, Y. et al. Biomimetic hairy affective-touch sensory AI interface. Nat Commun 17, 4146 (2026). https://doi.org/10.1038/s41467-026-70334-1
מילות מפתח: מגע אפקטיבי, עור אלקטרוני, אינטראקציה אדם־רובוט, חישה מישושית, זיהוי רגשות