Clear Sky Science · fr
Interface sensorielle affective biomimétique à poils pour IA
Pourquoi apprendre le toucher aux machines est important
Nous jugeons souvent l’état émotionnel d’une personne à la façon dont elle nous touche : une tape rapide, une poussée tendue, une caresse lente et rassurante. Les robots et appareils intelligents d’aujourd’hui voient et entendent, mais ils manquent en grande partie ce canal émotionnel riche. Cet article présente un nouveau type de peau électronique douce et poilue qui permet aux machines de percevoir non seulement qu’elles sont touchées, mais aussi la manière dont ce toucher se ressent émotionnellement, ouvrant la voie à des interactions plus douces et plus naturelles entre humains et IA.
Un nouveau type de peau artificielle poilue
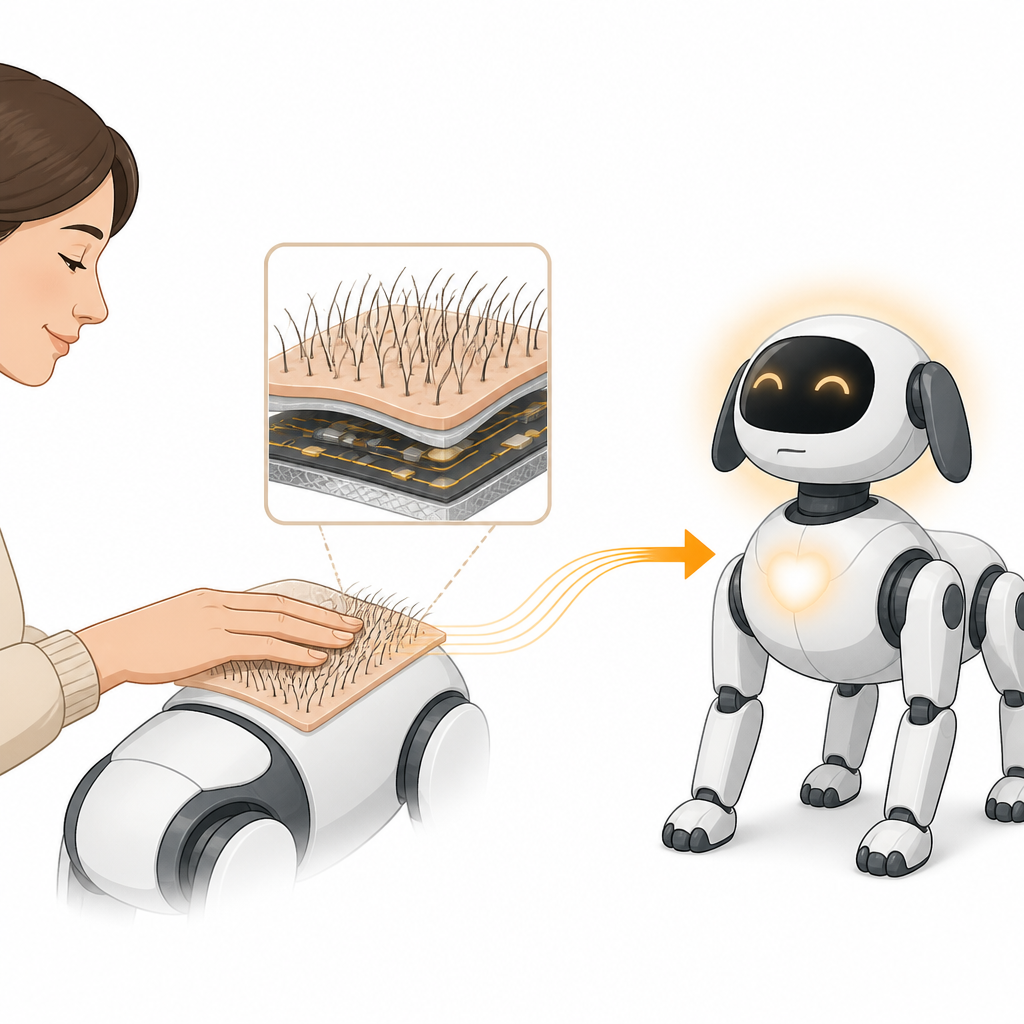
Les chercheurs ont créé un capteur flexible, baptisé BioAI2, qui imite les fins poils de la peau des mammifères. Chez les animaux, de petites terminaisons nerveuses enroulées autour des racines des poils détectent les caresses légères et envoient des signaux liés au confort et au lien social. BioAI2 reprend cette idée avec un tapis de poils en silicone souple posé au‑dessus d’un maillage conducteur fin et très uniforme. Quand un doigt effleure les poils, ceux‑ci se plient puis reprennent leur position, générant de brèves impulsions électriques sans batterie ni alimentation externe. Ces impulsions transportent des informations sur l’emplacement du contact, la force appliquée et la vitesse du mouvement, à la manière des signaux issus de nos propres fibres nerveuses sensibles au toucher.
Des caresses aux signaux proches du cerveau
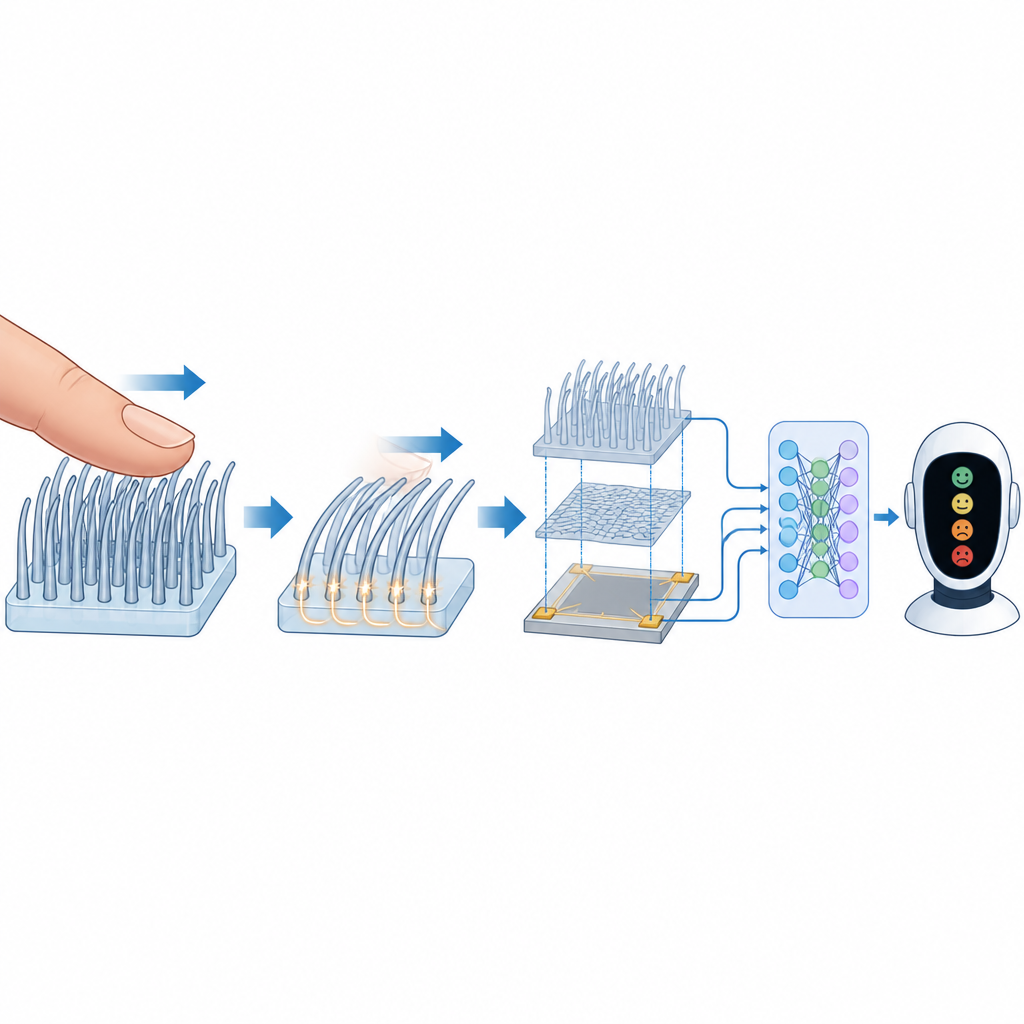
Sous la surface, l’appareil s’appuie sur un effet physique simple : quand deux matériaux différents se touchent puis se séparent, de petites charges se déplacent entre eux. La peau humaine et les poils en silicone échangent des charges quand le doigt glisse, et le maillage sous‑jacent collecte ces variations sous forme d’un train de pics électriques nets. En concevant soigneusement des poils de deux hauteurs et espacements différents, l’équipe a rendu le capteur particulièrement sensible aux forces légères tout en supportant des pressions plus fortes. Ils ont constaté que le taux d’impulsions électriques augmente avec la vitesse de frottement jusqu’à un point optimal, puis diminue, reflétant la façon dont certaines terminaisons tactiles humaines répondent le mieux aux vitesses de caresse. Cela fait de la sortie non seulement un signal technique, mais un équivalent direct de la manière dont notre organisme code le toucher plaisant.
Voir la force, la localisation et le mouvement en même temps
À la différence de nombreux capteurs tactiles antérieurs qui ne mesurent que la pression à des points fixes, BioAI2 lit plusieurs aspects du toucher à partir d’une seule feuille mince. Quatre électrodes aux coins recueillent des impulsions dont l’intensité et la temporalité varient selon l’endroit où le doigt touche et la façon dont il se déplace. Les chercheurs ont développé une méthode mathématique de cartographie basée sur des courbes lisses « d’isoliné » afin que même les contacts près des bords puissent être localisés très précisément sur une grande surface. La structure poilue et en pics rend aussi chaque impulsion extrêmement courte dans le temps, permettant au système de séparer des touches qui se chevauchent de plusieurs doigts et de reconstruire des trajectoires complexes, comme des lettres ou des formes tracées sur la surface.
Apprendre aux machines à lire les émotions par le toucher
Pour relier ces motifs aux émotions humaines, des volontaires ont regardé des extraits de films conçus pour déclencher des humeurs positives, neutres ou négatives, puis ont exécuté des gestes quotidiens comme des caresses, des frappes et des gifles sur la surface poilue. L’appareil a capturé des milliers d’exemples, et l’équipe a converti les signaux bruts en images temps‑fréquence colorées, en ajoutant des indicateurs de vitesse et de force de la caresse. Un système d’apprentissage profond a appris à reconnaître à la fois le type de geste et la tonalité émotionnelle probable qui l’accompagne. Entre différentes personnes, il a identifié le geste correctement presque à chaque fois et a classé l’état émotionnel avec plus de 80 % de précision, montrant que les indices émotionnels du toucher peuvent être décodés à partir de cette peau artificielle.
Clore la boucle émotionnelle avec des robots
Enfin, les chercheurs ont combiné la peau poilue avec un chien robot et un grand modèle de langage similaire aux chatbots modernes. La peau détectait la façon dont le propriétaire caressait le robot tandis que le modèle de langage recevait un contexte supplémentaire comme la situation et la relation entre l’humain et le robot. Ensemble, ils choisissaient des actions expressives appropriées, comme bondir, se reposer ou se blottir, pour correspondre à l’humeur détectée. Cela crée une boucle complète : une personne exprime une émotion par le toucher, la machine interprète à la fois le geste et le contexte, puis répond d’une manière qui paraît émotionnellement adéquate.
Ce que cela signifie pour les futures relations homme‑machine
Ce travail montre qu’une peau électronique fine, souple et couverte de poils peut transformer des motifs subtils de toucher en signaux exploitables par les machines pour percevoir nos sentiments. En associant ce capteur à l’IA moderne, robots et appareils peuvent dépasser les interactions rigides à base de boutons pour tendre vers des échanges qui rappellent le réconfort d’une caresse d’animal ou d’une main tenue. Si le système nécessite encore des surfaces plus étendues, davantage de données et d’autres sens comme la température pour égaler pleinement le toucher humain, il ouvre la voie à un futur où la technologie peut répondre à notre état émotionnel par le toucher, rendant les compagnons numériques, robots d’assistance et outils thérapeutiques plus sensibles et soutenants.»
Citation: Hong, J., Xiao, Y., Chen, Y. et al. Biomimetic hairy affective-touch sensory AI interface. Nat Commun 17, 4146 (2026). https://doi.org/10.1038/s41467-026-70334-1
Mots-clés: toucher affectif, peau électronique, interaction humain‑robot, détection tactile, reconnaissance des émotions