Clear Sky Science · ru
Биомиметический волосатый интерфейс сенсорного ИИ для аффективного прикосновения
Почему важно научить машины чувствовать прикосновение
Мы часто судим о том, как человек себя чувствует, по тому, как он нас касается: лёгкое похлопывание, напряжённый толчок, медлящее успокаивающее поглаживание. Современные роботы и умные устройства видят и слышат, но во многом лишены этого богатого эмоционального канала. В этой работе представлен новый тип мягкой волосатой электронной кожи, который позволяет машинам ощущать не только сам факт прикосновения, но и его эмоциональную окраску, что открывает дорогу более мягкому и естественному взаимодействию людей и ИИ.
Новый тип искусственной волосистой кожи
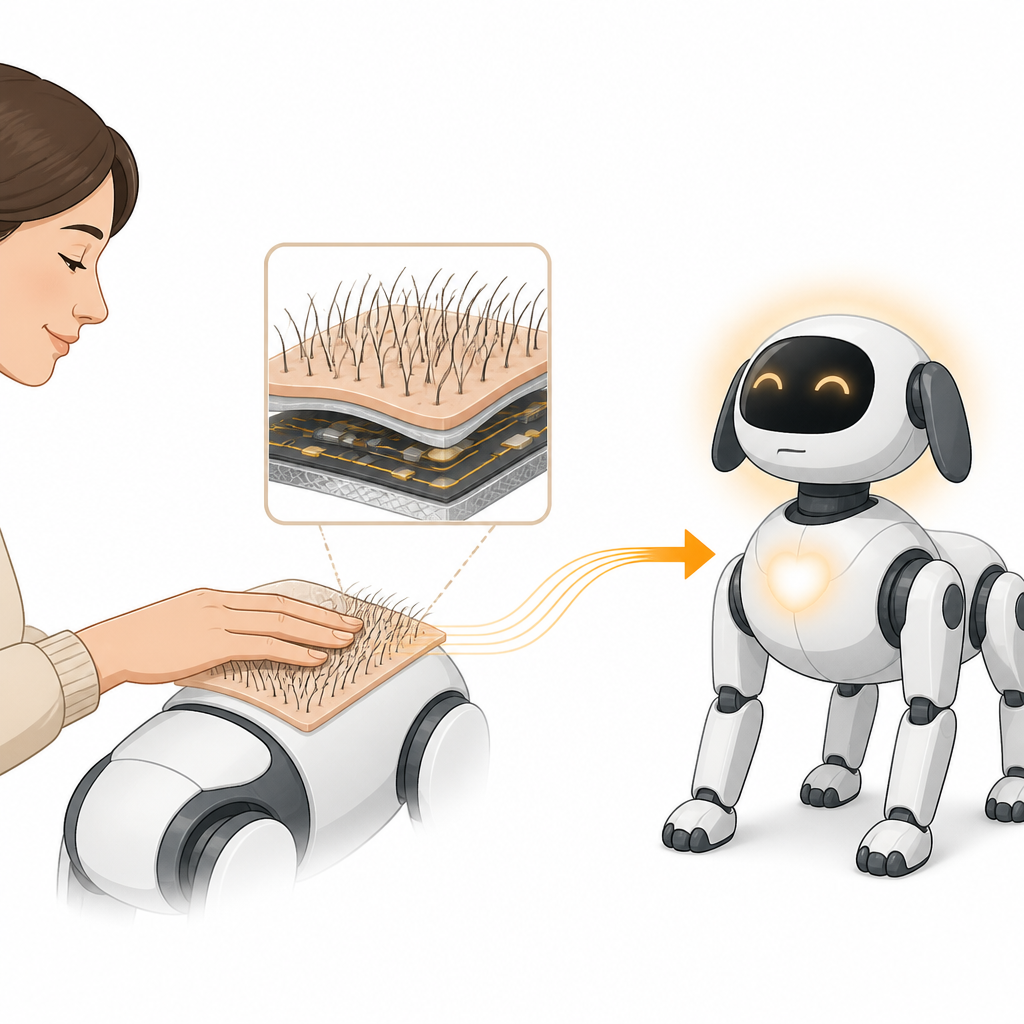
Исследователи создали гибкий сенсор, названный BioAI2, который имитирует тонкие волоски на коже млекопитающих. У животных крошечные нервные окончания вокруг оснований волосков обнаруживают лёгкие прикосновения и посылают сигналы, связанные с комфортом и социальными связями. BioAI2 копирует эту идею с помощью поля мягких силиконовых волосков, установленных на тонкой, высокооднородной проводящей сетке. Когда палец проводит по волоскам, они сгибаются и возвращаются в исходное положение, создавая кратковременные электрические импульсы без батарей или внешнего питания. Эти импульсы несут информацию о том, где произошло прикосновение, с какой силой и с какой скоростью оно движется — подобно сигналам наших собственных чувствительных нервных волокон.
От нежных прикосновений к сигналам, похожим на нервные
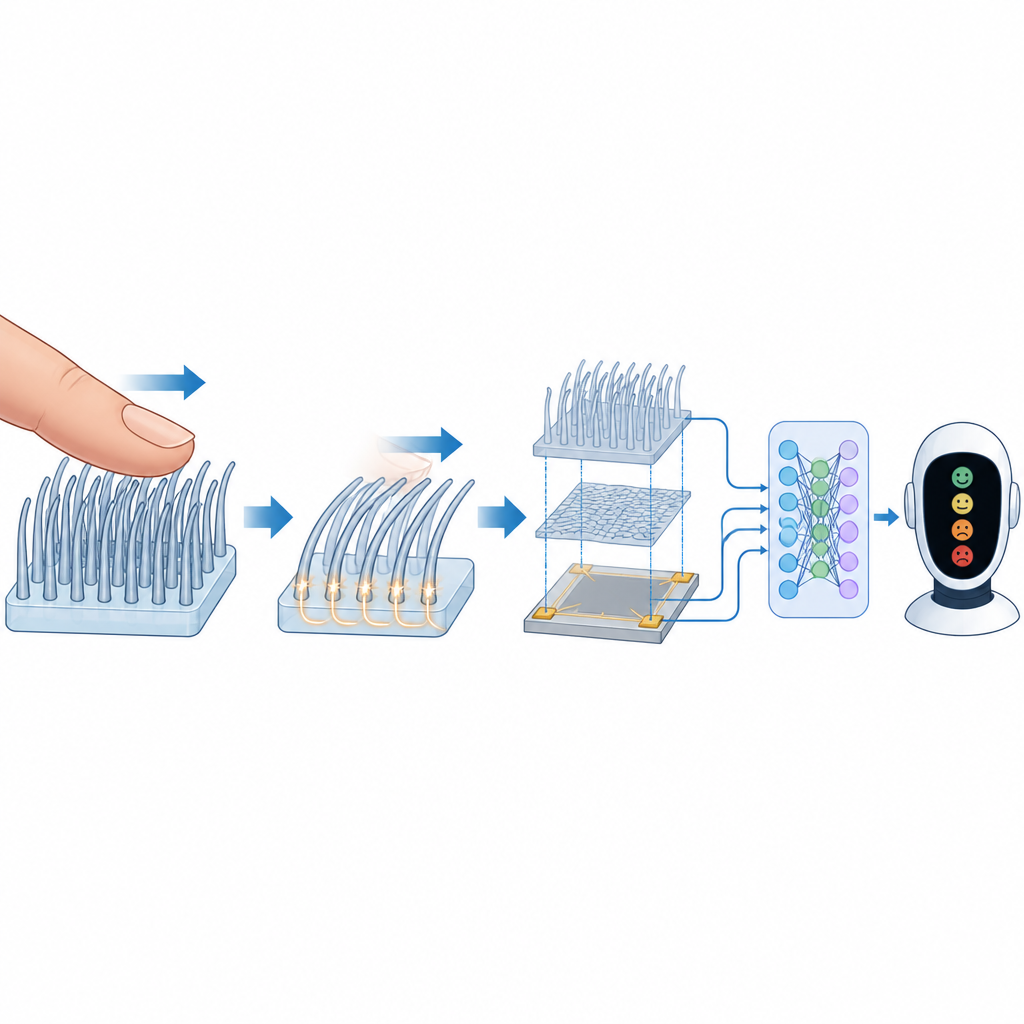
Под поверхностью устройство опирается на простой физический эффект: когда два разных материала соприкасаются и разъединяются, между ними перемещаются крошечные заряды. Кожа человека и силиконовые волоски обмениваются зарядом при скольжении пальца, а лежащая ниже сетка фиксирует эти изменения в виде серии резких импульсов. Тщательно спроектировав волоски двух разных высот и шагов, команда сделала сенсор особенно чувствительным к лёгким воздействиям, при этом приспособив его к более сильным нажатиям. Они обнаружили, что частота электрических импульсов растёт с увеличением скорости поглаживания до оптимальной точки, а затем снова падает — это соответствует тому, как некоторые нервные рецепторы человека наилучшим образом реагируют на скорости, характерные для ласковых прикосновений. Это делает выходные данные не просто техническим сигналом, а прямым аналогом того, как наши тела кодируют приятное прикосновение.
Одновременное восприятие силы, места и движения
В отличие от многих ранних тактильных сенсоров, которые измеряют лишь давление в фиксированных точках, BioAI2 считывает сразу несколько аспектов прикосновения с одной тонкой пластины. Четыре электрода в углах собирают импульсы, чья сила и синхронизация меняются в зависимости от того, где палец коснулся и как он двигался. Исследователи разработали математический метод сопоставления на базе плавных «изолиний», так что даже прикосновения у краёв можно очень точно локализовать на большой площади. Заострённый волосатый дизайн также делает каждый импульс чрезвычайно коротким по времени, что позволяет системе разделять перекрывающиеся прикосновения от нескольких пальцев и восстанавливать сложные траектории, например буквы или фигуры, нарисованные по поверхности.
Обучение машин считывать эмоции по прикосновению
Чтобы связать эти паттерны с человеческими эмоциями, добровольцы смотрели отрывки фильмов, призванные вызвать положительное, нейтральное или отрицательное настроение, а затем выполняли повседневные жесты — поглаживания, постукивания и шлёпки по волосатой поверхности. Устройство захватило тысячи примеров, и команда преобразовала сырые сигналы в цветные временно‑частотные изображения, добавив индикаторы скорости и силы поглаживания. Система глубокого обучения научилась распознавать как тип жеста, так и вероятную эмоциональную тональность за ним. Среди разных людей она почти всегда правильно определяла жест и с точностью более 80 процентов маркировала эмоциональное состояние, показывая, что эмоциональные подсказки в прикосновении можно расшифровать по данным этой искусственной кожи.
Замыкание эмоциональной петли с роботами
Наконец, исследователи объединили волосатую кожу с роботизированной собакой и крупной языковой моделью, похожей на современные чат‑боты. Кожа фиксировала, как владелец гладил робота, в то время как языковая модель получала дополнительный контекст, например ситуацию и отношение между человеком и роботом. Вместе они выбирали уместные выразительные действия — подпрыгивание, отдых или прижимание носа — чтобы соответствовать обнаруженному настроению. Так создаётся полный цикл: человек выражает эмоцию прикосновением, машина интерпретирует и прикосновение, и контекст, а затем отвечает так, чтобы это казалось эмоционально уместным.
Что это означает для будущих отношений человека и машины
Эта работа демонстрирует, что тонкая мягкая электронная кожа с волосками может превращать тонкие паттерны прикосновения в сигналы, которые машины могут использовать для восприятия наших чувств. Сочетая такой сенсор с современным ИИ, роботы и устройства смогут выйти за рамки жёстких нажатий кнопок и перейти к взаимодействиям, напоминающим утешение при поглаживании животного или держании за руку. Хотя системе ещё нужны большие покрытия, больше данных и другие ощущения, такие как температура, чтобы полностью соответствовать человеческому тактильному опыту, это указывает на будущее, где технология может реагировать на наше эмоциональное состояние через прикосновение, делая цифровых компаньонов, вспомогательных роботов и терапевтические инструменты более чувствительными и поддерживающими.
Цитирование: Hong, J., Xiao, Y., Chen, Y. et al. Biomimetic hairy affective-touch sensory AI interface. Nat Commun 17, 4146 (2026). https://doi.org/10.1038/s41467-026-70334-1
Ключевые слова: аффективное прикосновение, электронная кожа, взаимодействие человека и робота, тактильное восприятие, распознавание эмоций