Clear Sky Science · nl
RGB-gestuurde verfijning in het frequentiedomein voor sparse-naar-dense diepteaanvulling
Scherpere digitale diepte voor alledaagse machines
Zelfrijdende auto’s, bezorgrobots en headsets voor augmented reality moeten niet alleen weten hoe dingen eruitzien, maar ook hoe ver ze weg zijn. Moderne lasersensoren leveren vaak slechts een schaars aantal afstandspunten, wat te weinig is voor veilige navigatie of overtuigende 3D-visualisaties. Dit artikel presenteert een nieuwe manier om de ontbrekende diepte-informatie "in te vullen" met behulp van camerabeelden, en zo gedetailleerde afstandskaarten te produceren die objectranden scherp houden zonder zich te laten misleiden door oppervlaktestructuren.
Waarom het invullen van afstand zo moeilijk is
Diepteaanvulling probeert een zeer schaars setje afstandsmonsters om te zetten in een volledige dieptekaart, met een gewone kleurenfoto als leidraad. Eerdere systemen mengen vaak kleur- en diepte-informatie direct binnen een neuraal netwerk. Die korte weg creëert twee tegenovergestelde problemen. Enerzijds kan het netwerk baksteenpatronen, strepen of logo’s uit het kleurbeeld kopiëren naar de dieptekaart als schijnbare bulten en deuken. Anderzijds hebben methoden die deze valse details agressief wegvlakken de neiging om echte grenzen tussen objecten te vervagen, zoals de omtrek van een auto of een verkeersbord. Het in balans brengen van detail en betrouwbaarheid is een centraal obstakel voor toepassingen in de echte wereld.
Vormen scheiden van oppervlaktestructuur
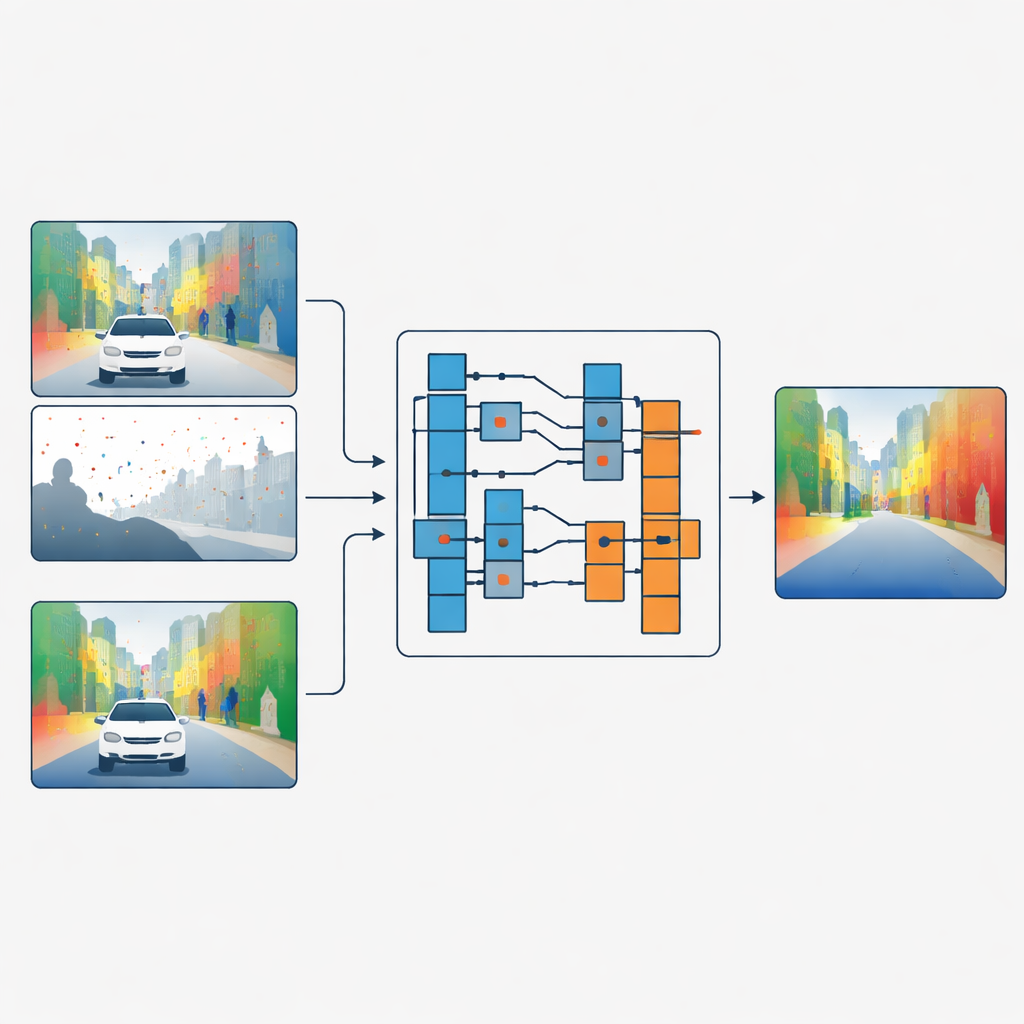
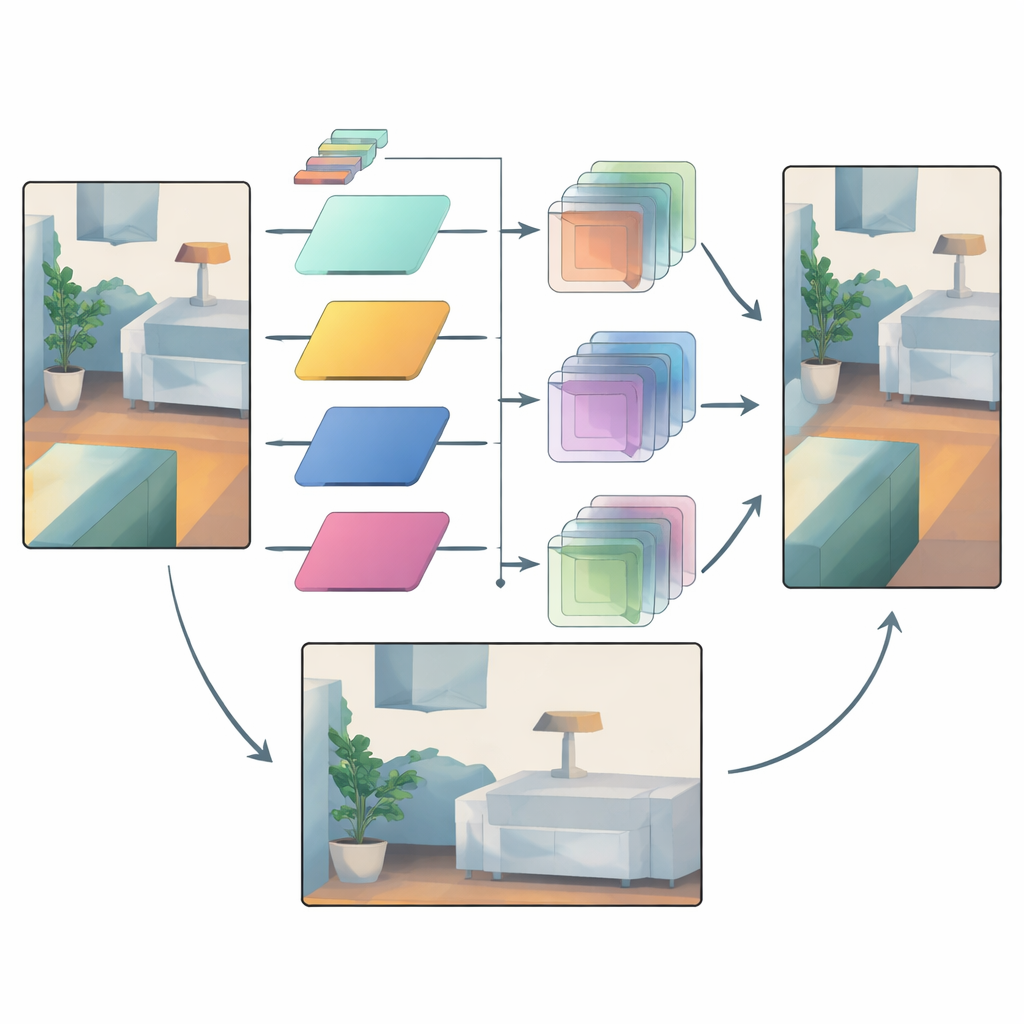
De auteurs stellen een andere strategie voor: in plaats van kleur- en dieptekenmerken te mengen, laten ze het kleurbeeld bepalen hoe de dieptegegevens gefilterd moeten worden, zonder de twee direct te vermengen. Hun netwerk verwerkt eerst de schaars geplaatste dieptepunten en de kleur in aparte takken. In belangrijke stadia van het netwerk bekijkt een module genaamd Guided Refinement Module de kleurkenmerken door een frequentielens. Met behulp van een wavelettransformatie splitst die de kleurinformatie in zachte, laagfrequente delen die brede vormen en langzaam veranderende gebieden vastleggen, en hoogfrequente delen die scherpe randen en fijne texturen zoals bladeren of raamkozijnen vastleggen.
Slimme filters die zich aan elk gebied aanpassen
Zodra de kleurinformatie op deze manier is gesplitst, leert de methode een verzameling kleine beeldfilters van verschillende groottes. Voor elk gebied en elke frequentieband kiest het netwerk hoe groot een filter moet zijn en hoe sterk het moet worden toegepast. Grote filters worden bevoordeeld in gladde gebieden waar de diepte langzaam zou moeten veranderen, wat helpt betrouwbare metingen over lege regio’s te verspreiden. Kleine filters worden gebruikt nabij sterke randen, zodat de dieptekaart duidelijke grenzen behoudt in plaats van het vervagen van het ene object in het andere. Cruciaal is dat de filters altijd alleen dieptewaarden met andere dieptewaarden combineren; de kleurgegevens sturen alleen welke filter te gebruiken en waar. Deze "operator maar niet waarde"-verbinding werkt als een knelpunt dat voorkomt dat oppervlaktestructuren in het kleurbeeld worden afgedrukt als valse diepte.
Vertrouwen in betrouwbare signalen terwijl onzekerheid wordt beteugeld
Zelfs met adaptieve filtering blijven sommige gebieden onzeker — denk aan verre objecten die door regen zichtbaar zijn, of regio’s waar zeer weinig laserpunten beschikbaar zijn. Om dit aan te pakken gebruikt het netwerk een tweede mechanisme dat tussenliggende dieptekenmerken van vroege en late stadia vergelijkt. Vroege kenmerken staan dichter bij de ruwe sensorinput en dragen een gevoel van welke regio’s betrouwbaar zijn. Het model bouwt attentiemaskers die benadrukken waar structuur betrouwbaar is en welke featurekanalen het belangrijkst zijn. Deze maskers versterken vervolgens voorzichtig betrouwbare details en dempen verdachte veranderingen die later in de pijplijn zijn geïntroduceerd, waardoor overmatige vervaging en randartefacten worden verminderd.
Bewezen winst op wegen en binnenshuis
Het team test hun aanpak op twee standaard benchmarks: KITTI voor buitenscènes met verkeer en NYUv2 voor binnenruimtes. Hun methode haalt consequent resultaten die overeenkomen met of beter zijn dan toonaangevende concurrenten op meerdere foutmaten, terwijl het minder parameters gebruikt dan sommige van de zwaarste modellen. Het presteert bijzonder goed wanneer dieptelezingen extreem schaars zijn, zoals bij het simuleren van goedkopere lasersensoren met slechts een handvol scanlijnen of punten. Visuele vergelijkingen tonen dunnere structuren, zoals lantaarnpalen, die schoon behouden blijven, en auto’s of meubels die duidelijker van hun achtergrond zijn gescheiden, met veel minder valse rimpels door tekstuurkopieën.
Wat dit betekent voor 3D-visie in de echte wereld
Door opnieuw te denken over hoe camerabeelden diepteaanvulling sturen, toont dit werk dat het mogelijk is de nuttige aanwijzingen uit kleur — zoals randen en algemene lay-out — te behouden zonder hun misleidende texturen over te nemen. De sleutel is het gebruik van frequentieanalyse en zorgvuldig begrensde interacties, zodat kleur bepaalt hoe dieptewaarden worden gecombineerd, niet welke waarden dat zouden moeten zijn. Hierdoor kunnen robots, voertuigen en AR-apparaten dichtere, scherpere dieptekaarten verkrijgen uit dezelfde schaarse sensoren, wat veiliger navigeren en stabielere 3D-ervaringen dichter bij het dagelijks gebruik brengt.
Bronvermelding: Wang, H., Tang, Z., Pawara, P. et al. RGB-conditioned frequency domain refinement for sparse-to-dense depth completion. Sci Rep 16, 10757 (2026). https://doi.org/10.1038/s41598-026-45432-1
Trefwoorden: diepteaanvulling, lidar, 3D-perceptie, computervisie, autonoom rijden