Clear Sky Science · ja
スパースからデンスへの深度補完のためのRGB条件付き周波数領域リファインメント
日常の機械に向けたより鮮明なデジタル深度
自動運転車、配送ロボット、拡張現実ヘッドセットはいずれも、物体がどのくらい離れているかを理解する必要があり、見た目だけでは不十分です。現代のレーザーセンサーは距離点をわずかにしか提供せず、安全な走行や説得力のある3Dグラフィックスには希薄すぎます。本論文は、カメラ画像を用いて欠落した深度情報を「埋める」新しい方法を提示し、物体の境界を鮮明に保ちながら表面テクスチャに惑わされない詳細な距離マップを生成します。
距離を埋めることが難しい理由
深度補完は非常にスパースな距離サンプルの集合を、通常のカラーフォトを指針としてフルの深度画像に変換しようとする課題です。以前のシステムは、カラーデータと深度データをニューラルネットワーク内で直接混ぜ合わせることが多く、その近道が二つの相反する問題を生みます。一方では、ネットワークがカラー画像のレンガ模様、ストライプ、ロゴなどを深度マップに偽の凹凸としてコピーしてしまうことがあります。これに対し、こうした偽の詳細を攻撃的に平滑化する手法は、車や標識の輪郭など本当の物体境界をぼかしてしまいがちです。詳細さと信頼性のバランスを取ることが、実世界での適用における中心的障害となっています。
形状と表面ディテールを分離する
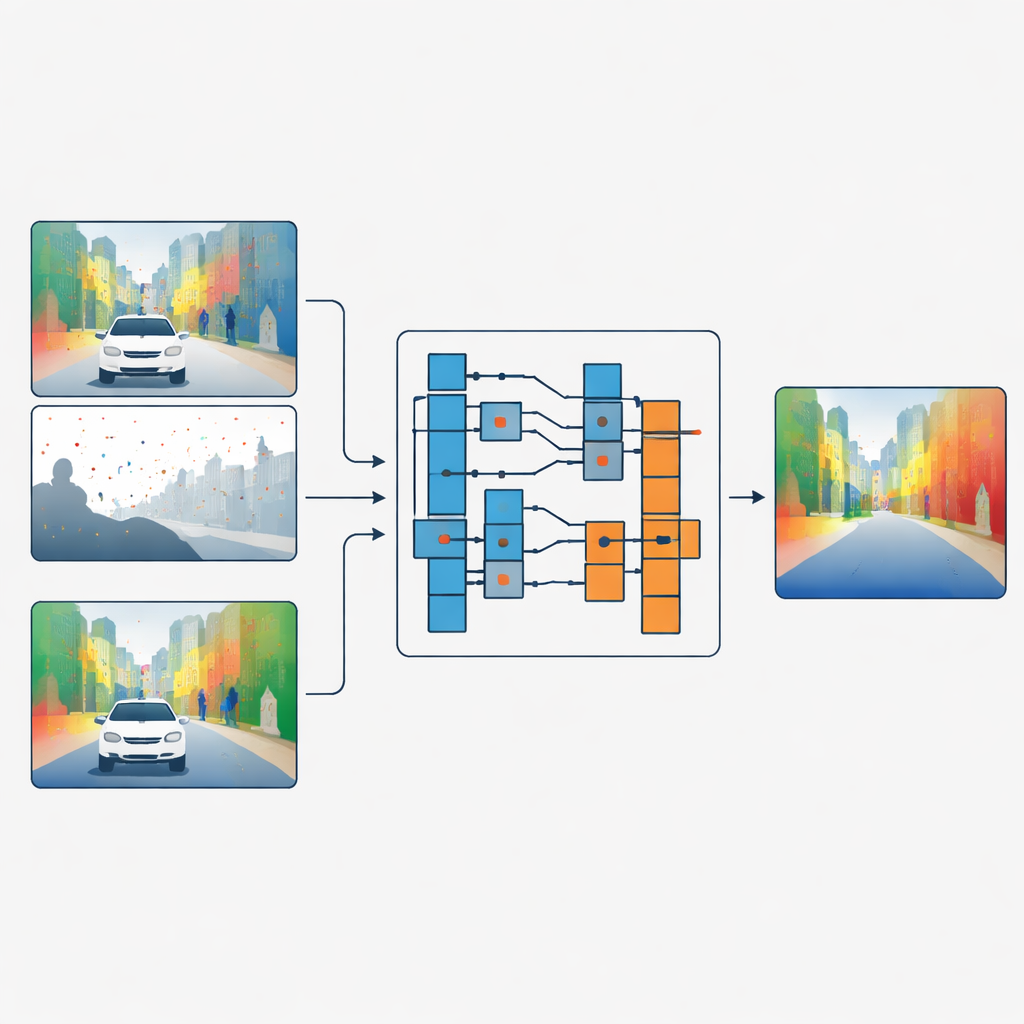
著者らは異なる戦略を提案します。カラーと深度の特徴を混ぜる代わりに、カラー画像が深度データをどのようにフィルタリングするかを決めさせ、両者を直接混合しないようにします。ネットワークはまずスパースな深度とカラーを別々のブランチで処理します。ネットワークの主要な段階で、Guided Refinement Module(誘導リファインメントモジュール)が周波数のレンズを通じてカラー特徴を観察します。ウェーブレット変換を用いて、カラー情報を広い形状やゆっくり変化する領域を捉える低周波成分と、葉や窓枠のような鋭いエッジや細かなテクスチャを捉える高周波成分に分割します。
領域ごとに適応するスマートなフィルタ
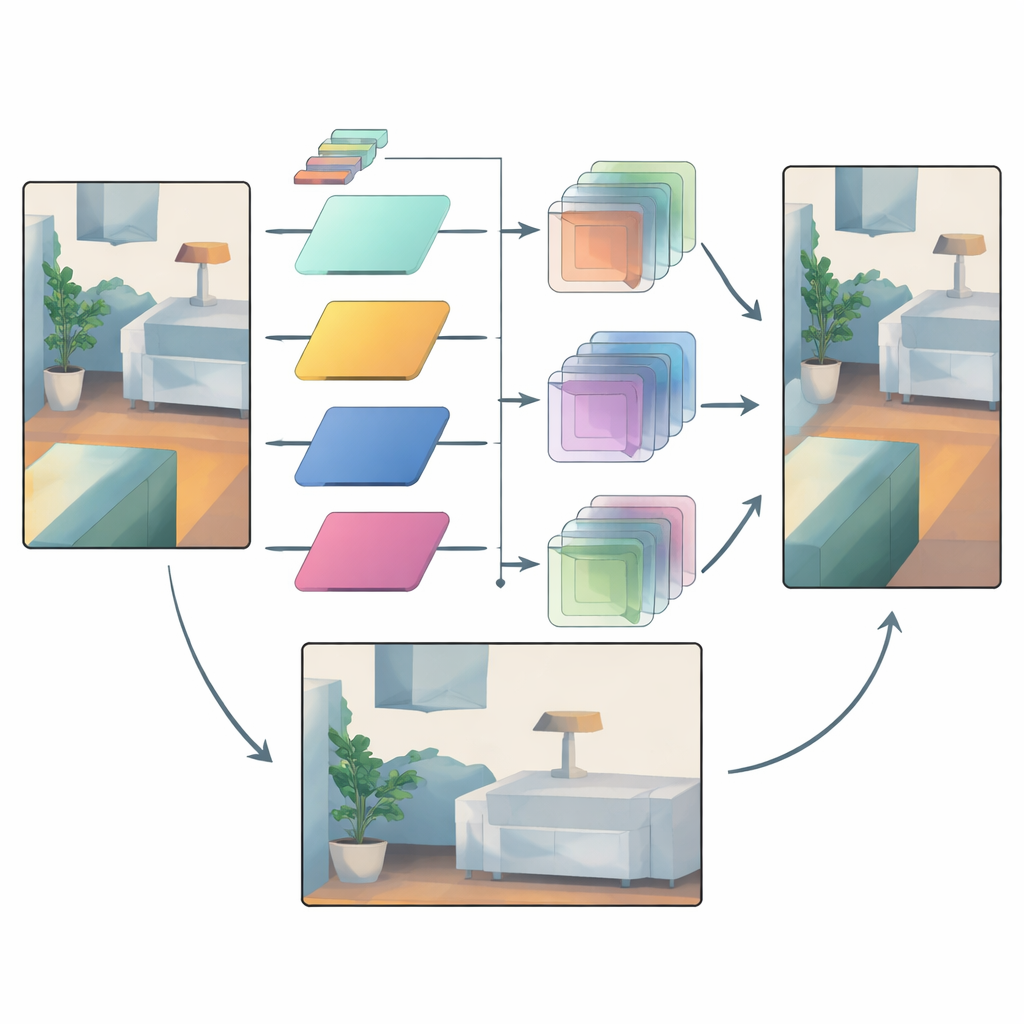
カラー情報がこのように分割されると、この手法は異なるサイズの小さな画像フィルタ群を学習します。各領域と各周波数帯域について、ネットワークはどの大きさのフィルタを適用し、どの強さで適用するかを選びます。滑らかな領域では大きなフィルタが好まれ、深度が緩やかに変化するところで信頼できる測定値を空白領域に広げるのに役立ちます。強いエッジの近くでは小さなフィルタが使われ、深度マップが一つの物体を別の物体ににじませるのではなく、はっきりした境界を維持します。重要なのは、フィルタは常に深度値のみを他の深度値と組み合わせることであり、カラー情報はどのフィルタをどこで使うかを決めるだけだという点です。この「演算子は与えるが値は与えない」という接続は、カラー画像の表面テクスチャが偽の深度として転写されるのを防ぐボトルネックとして機能します。
信頼できる信号を重視し不確実性を抑える
適応フィルタリングがあっても、不確実な領域は残ります。雨越しに見える遠方の物体や、レーザーポイントが非常に少ない領域を想像してください。これに対処するため、ネットワークは初期段階と後期段階の中間深度特徴を比較する第二の仕組みを用います。初期の特徴は生センサ入力に近く、どの領域が信頼できるかの感覚を運びます。モデルは、構造が信頼できる場所や重要な特徴チャネルを強調するアテンションマスクを構築します。これらのマスクは、確信のある詳細を穏やかに強調し、パイプライン後半で導入された疑わしい変化を抑えることで、過度な平滑化や余分なアーティファクトを低減します。
道路と室内で実証された改善
チームはこの手法を2つの標準ベンチマークで評価しました:屋外走行シーンのKITTIと室内ルームのNYUv2です。彼らの手法は複数の誤差指標において一貫して主要な競合を上回るか互角であり、一部の非常に重いモデルよりもパラメータ数が少なく済みます。非常にスパースな深度測定、例えばスキャンラインやポイントがごくわずかな安価なレーザーセンサを模擬した場合に特に良好に動作します。視覚的比較では、街灯柱のような細い構造がきれいに保持され、車や家具が背景からより明瞭に分離され、テクスチャのコピーによる誤った波紋がはるかに少ないことが示されています。
実世界の3Dビジョンにとっての意義
カメラ画像が深度補完を導く方法を再考することで、本研究は色から得られる有用な手がかり(エッジや全体的なレイアウトなど)を保持しつつ、誤解を招くテクスチャを受け継がないことが可能であることを示します。鍵は周波数解析と慎重に制約された相互作用を用いて、カラーが深度値をどう組み合わせるかを決めさせ、値そのものを決めさせないことです。その結果、ロボットや車両、AR機器は同じスパースなセンサからより密でシャープな深度マップを得られ、安全なナビゲーションやより安定した3D体験が日常に近づきます。
引用: Wang, H., Tang, Z., Pawara, P. et al. RGB-conditioned frequency domain refinement for sparse-to-dense depth completion. Sci Rep 16, 10757 (2026). https://doi.org/10.1038/s41598-026-45432-1
キーワード: 深度補完, LiDAR, 3D知覚, コンピュータビジョン, 自動運転