Clear Sky Science · he
שיפור בתדירות לחלל התדר המותנה ב-RGB להשלמת עומק מדליח לעבה
עומק דיגיטלי חדים יותר למכונות היומיום
מכוניות אוטונומיות, רובוטי משלוחים ומשקפי מציאות רבודה — כולם זקוקים להבין מרחקים, לא רק מראה. חיישני לייזר מודרניים מספקים רק נקודות מרחק דלילות, דבר שאינו מספיק לניווט בטוח או לגרפיקה תלת־ממדית משכנעת. מאמר זה מציג שיטה חדשה ל"מילוי" מידע העומק החסר באמצעות תמונות מצלמה, המייצרת מפות מרחק מפורטות השומרות על קצוות חדים מבלי להיפגע על ידי מרקמי משטחים.
מדוע מילוי מרחק קשה כל כך
השלמת עומק מנסה להפוך קבוצת דגימות מרחק מאוד דלילה לתמונה מלאה של עומק, תוך שימוש בתצלום צבע רגיל כמדריך. מערכות קודמות לעיתים משלבות ישירות מידע צבע ועומק בתוך רשת עצבית. קיצור דרך זה יוצר שתי בעיות מנוגדות. מצד אחד, הרשת עלולה להעתיק תבניות לבנים, פסים או לוגואים מהתמונה הצבעונית אל מפה העומק כבליטות ושקעים כוזבים. מצד שני, שיטות שמשחזרות באופן אגרסיבי פרטים כאלו נוטות לטשטש את הגבולות האמיתיים בין עצמים, כגון קווי המתאר של רכב או שלט רחוב. איזון בין פרטיות ואמינות הפך למכשול מרכזי ביישומים בעולם האמיתי.
להפריד צורות מפרטי משטח
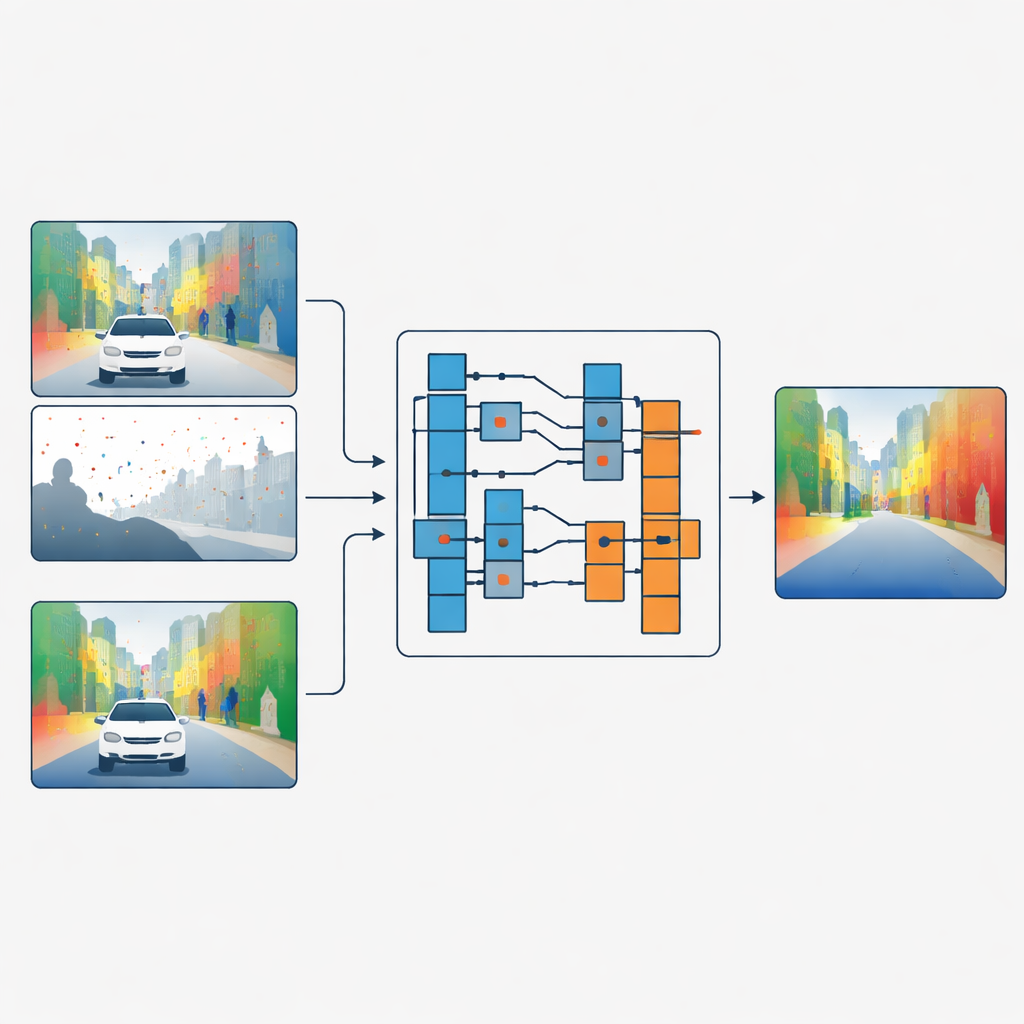
המחברים מציעים אסטרטגיה שונה: במקום למזג תכונות צבע ועומק, הם מאפשרים לתמונה הצבעונית להחליט כיצד יש לסנן את נתוני העומק, מבלי לערבב את השניים ישירות. הרשת שלהם מעבדת תחילה את העומק הדליל והצבע בענפים נפרדים. בשלבים מרכזיים ברשת, מודול שנקרא Guided Refinement Module בוחן את תכונות הצבע דרך עדשה של תדירות. באמצעות טרנספורמציית ויילט, הוא מפצל את המידע הצבעוני לחלקים חלקים בעלי תדר נמוך שתופסים צורות רחבות ואיזורים המשתנים באיטיות, ולחלקים בעלי תדר גבוה שתופסים קצוות חדים וטקסטורות עדינות כמו עלים או מסגרות חלון.
מסננים חכמים המסתגלים לכל אזור
לאחר שהמידע הצבעוני מפוצל בצורה זו, השיטה לומדת משפחה של מסננים קטנים בגדלים שונים. עבור כל אזור וכל סרט תדרים, הרשת בוחרת באיזה גודל מסנן להשתמש ובאיזו עוצמה להפעילו. מסננים גדולים נבחרים באזורים חלקים שבהם העומק צריך להשתנות בהדרגה, ועוזרים לפזר מדידות אמינות על אזורים ריקים. מסננים קטנים משמשים בסמוך לקצוות חזקים, כך שמפת העומק תשמור על גבולות ברורים במקום לטשטש עצם לתוך אחר. בעקרון חשוב, המסננים תמיד משלבים רק ערכי עומק עם ערכי עומק אחרים; נתוני הצבע רק מנווטים איזה מסנן להשתמש והיכן. חיבור "אופרטור אך לא ערך" זה פועל כמחסום שמונע מטקסטורות משטח בתמונה הצבעונית להיטמע כעומק כוזב.
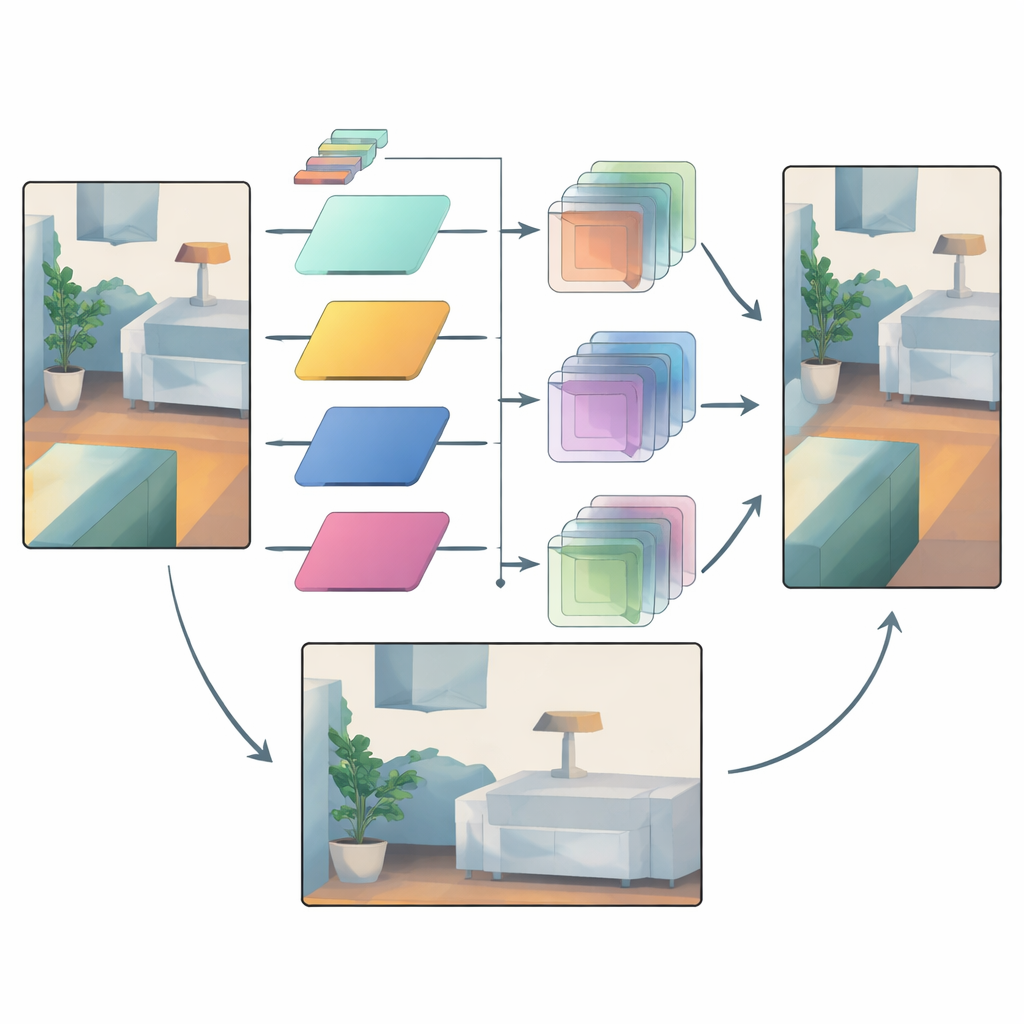
לאמץ איתותים אמינים תוך כביית אי־ודאות
גם עם סינון אדפטיבי, אזורים מסוימים נותרות בהם אי־ודאות — חשבו על עצמים רחוקים הנראים דרך גשם, או אזורים שבהם יש מעט מאוד נקודות לייזר. כדי להתמודד עם זה, הרשת משתמשת במנגנון שני המשווה תכונות עומק ביניים משלב מוקדם ושלב מאוחר. תכונות מוקדמות קרובות יותר לקלט הגולמי של החיישן ונושאות תחושה אלו אזורים מהימנים. הדגם בונה מסכות קשב המדגישות היכן המבנה אמין ואילו ערוצי תכונה חשובים ביותר. מסכות אלה מגדילות בעדינות פרטים בטוחים ומדכאות שינויים חשודים שהוחדרו מאוחר יותר בצנרת, מה שמפחית החלקה-יתר ותוצרי לוואי מקריים.
שיפורים מוכחים בכבישים ובפנים מבנים
הצוות בודק את הגישה שלהם בשני בנצ'מרקים סטנדרטיים: KITTI לסצנות נהיגה חיצוניות ו‑NYUv2 לחדרים פנימיים. השיטה שלהם תואמת או עולה על המתחרים המרכזיים במדדים של שגיאה מרובים, תוך שימוש בפחות פרמטרים מאשר חלק מהדגמים הכבדים ביותר. היא מתפקדת היטב במיוחד כשהקריאות עומק דלילות מאוד, למשל בעת סימולציה של חיישני לייזר זולים יותר עם רק מספר מצומצם של קווי סריקה או נקודות. השוואות ויזואליות מראות ששמורות מבנים דקים, כמו עמודי תאורה, באופן נקי יותר, ורכבים או רהיטים מופרדים בבירור מהרקע, עם הרבה פחות גלים כוזבים שנגרמים מהעתקת טקסטורה.
מה זה אומר לראייה תלת־ממדית בעולם האמיתי
על ידי חשיבה מחדש על האופן שבו תמונות מצלמה מנחות השלמת עומק, עבודה זו מראה שאפשר לשמור על הרמזים המועילים מהצבע — כגון קצוות וסידור כולל — בלי לרשת את המרקמים המטעות שלהם. המפתח הוא שימוש באנליזת תדירות ואינטראקציות מוגבלות בקפידה כך שהצבע יחליט כיצד משולבים ערכי העומק, לא מה צריכים להיות הערכים. כתוצאה מכך, רובוטים, כלי רכב ומכשירי AR יכולים לקבל מפות עומק צפופות וחדות יותר מאותם חיישנים דלילים, לקרב ניווט בטוח וחוויות תלת־ממד יציבות יותר אל המציאות היומיומית.
ציטוט: Wang, H., Tang, Z., Pawara, P. et al. RGB-conditioned frequency domain refinement for sparse-to-dense depth completion. Sci Rep 16, 10757 (2026). https://doi.org/10.1038/s41598-026-45432-1
מילות מפתח: השלמת עומק, לידר, תפיסה תלת־ממדית, ראייה ממוחשבת, נהיגה אוטונומית