Clear Sky Science · zh
将机器人巡检与数字孪生闭环集成用于在役钢桥疲劳预后
为何保障大型桥梁安全至关重要
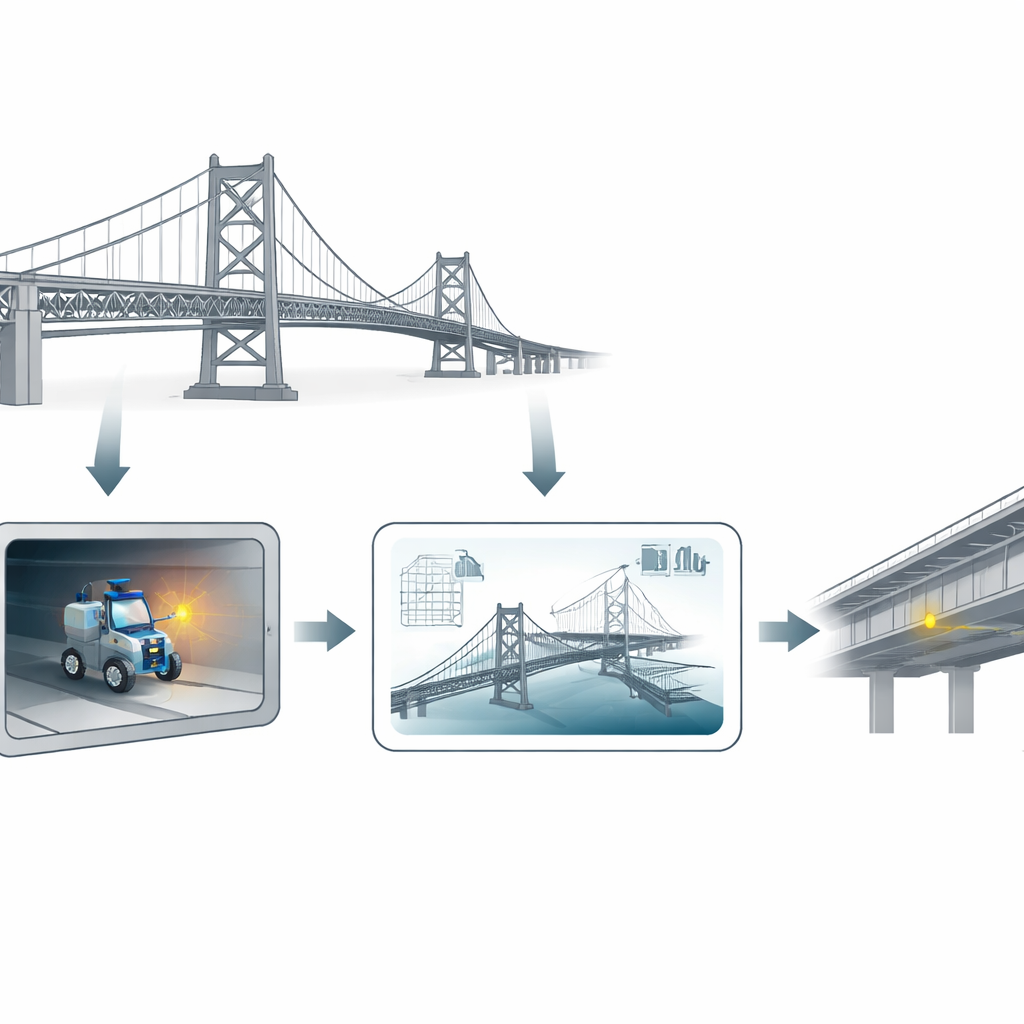
大跨径钢桥是现代交通的脊梁,每天承载成千上万辆车辆。随着岁月和车流,桥面板中的微小裂纹会缓慢扩展,最终威胁安全并迫使进行高昂的维修或封闭。如今,大多数此类裂纹仍然由人工在狭窄的钢箱内用手电和相机爬行检查发现。本文提出了一种新的监护方式:一个闭环系统,机器人能发现并测量裂纹,桥梁的虚拟“孪生体”则预测这些裂纹的演化,从而在问题发生之前就能安排维护。
在钢箱内爬行的机器人
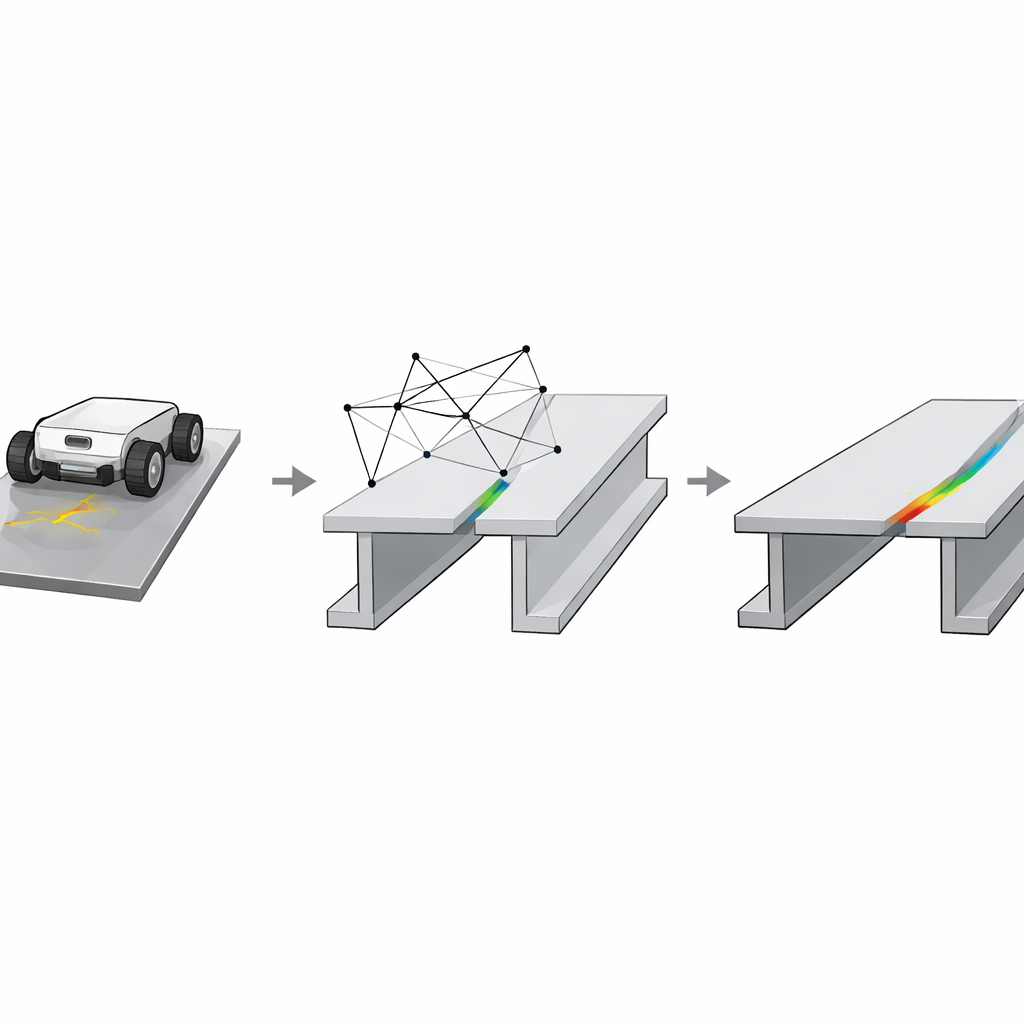
在许多大跨桥梁中,道路由正交各向异性钢面板支撑——薄钢板由密集排列的肋和隔板加劲。焊缝处的连接处在桥梁生命周期内容易产生成千上万的疲劳裂纹。人工检查速度慢、环境艰苦且容易遗漏细节。作者设计了一种紧凑型机器人,配备磁性车轮,可以吸附在钢表面并在封闭的箱梁内移动。一个小型机械臂携带高分辨率相机,沿焊缝扫描,车载软件自动在图像中突出显示甚至是发丝状的裂纹。在实验室测试中,机器人在箱梁内的位置可定位到几厘米内,精度足以明确某条裂纹属于哪一段焊缝以及沿焊缝的具体位置。
桥梁的动态数字孪生
发现裂纹只是部分工作;理解它们对桥梁未来意味着什么同样重要。为此,研究人员将机器人的测量结果与桥梁的详细计算机副本——数字孪生体相连。每一处识别出的裂纹都由相机图像提取为干净的中心线,然后映射到桥面板和肋的三维模型中。模型会在每个裂纹周围自动细化虚拟网格,并模拟基于国家设计规范的交通荷载如何在裂纹前端集中应力。通过应用成熟的断裂力学规律,孪生体可以在计算中“老化”桥梁,预测在重复卡车通行下每条裂纹可能扩展的距离和速度,以及在需紧急维修前剩余的疲劳寿命。
从真实裂纹中学习的闭环
该框架并不止步于单向预测。经过一段服役期后,机器人可以被派回同一道焊缝,新观测到的裂纹形状会与数字孪生先前的预测进行比对。作者提出了逐点比较观测与预测裂纹骨架的数学度量,既跟踪二者的位移差异,也评估裂纹方向的偏转量。然后将这些差异解释为裂纹前缘张开和剪切力混合的变化。在孪生体与真实裂纹高度一致的区域,对模型的信心较高;在二者偏离的区域——尤其是剪切占主导的区域——系统会标记出更高的不确定性,提示应增加检查频率或采取保守的维护规划。
从实验室测试到真实桥梁
团队首先在模拟真实桥梁箱形内部的实验段中验证了机器人。测试显示出强有力的磁吸附、在竖直和水平面上的平稳运动,以及能够清晰拍摄到亚毫米级裂缝的焊缝图像。定位误差大多保持在2厘米以下,远小于焊缝间距。随后他们在中国一座服役15年的斜拉桥内部署了该系统。与传统人工相比,机器人检验将每个梁的平均检查时间从约两小时缩短到不足一小时。图像测得的裂纹长度与人工实测值在大多数样本中约匹配到十个百分点内。当这些裂纹输入到数字孪生中时,表面隔板裂纹在毫米量级内重现良好,而更复杂的面板-肋裂纹则显示出更大的差异,且随着剪切力影响的增大而增大。
对日常桥梁安全的意义
对非专业读者而言,关键结论是:这项研究指向了能够“不仅告诉工程师哪里有裂纹,还告诉他们每处裂纹应有多担忧以及这种担忧将如何随时间演变”的桥梁。通过将机器人巡检与基于物理的数字孪生结合,该框架把零散的目视检查转变为一个数据丰富的循环:机器人收集裂纹数据,孪生体预测未来扩展,按此安排检查与维修,下一轮测量又回馈以评估和改进预测。尽管仍需在不同桥梁上进行更多测试,这一方法有望带来更安全、更具韧性的基础设施,减少对缓慢人工巡查的依赖,使维护能够领先一步发现隐蔽损伤,而不是落后一拍。
引用: Li, X., Fu, Z., Guo, H. et al. A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges. Commun Eng 5, 76 (2026). https://doi.org/10.1038/s44172-026-00637-0
关键词: 钢桥疲劳, 机器人巡检, 数字孪生, 结构健康监测, 裂纹扩展预测