Clear Sky Science · en
A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges
Why keeping big bridges safe matters
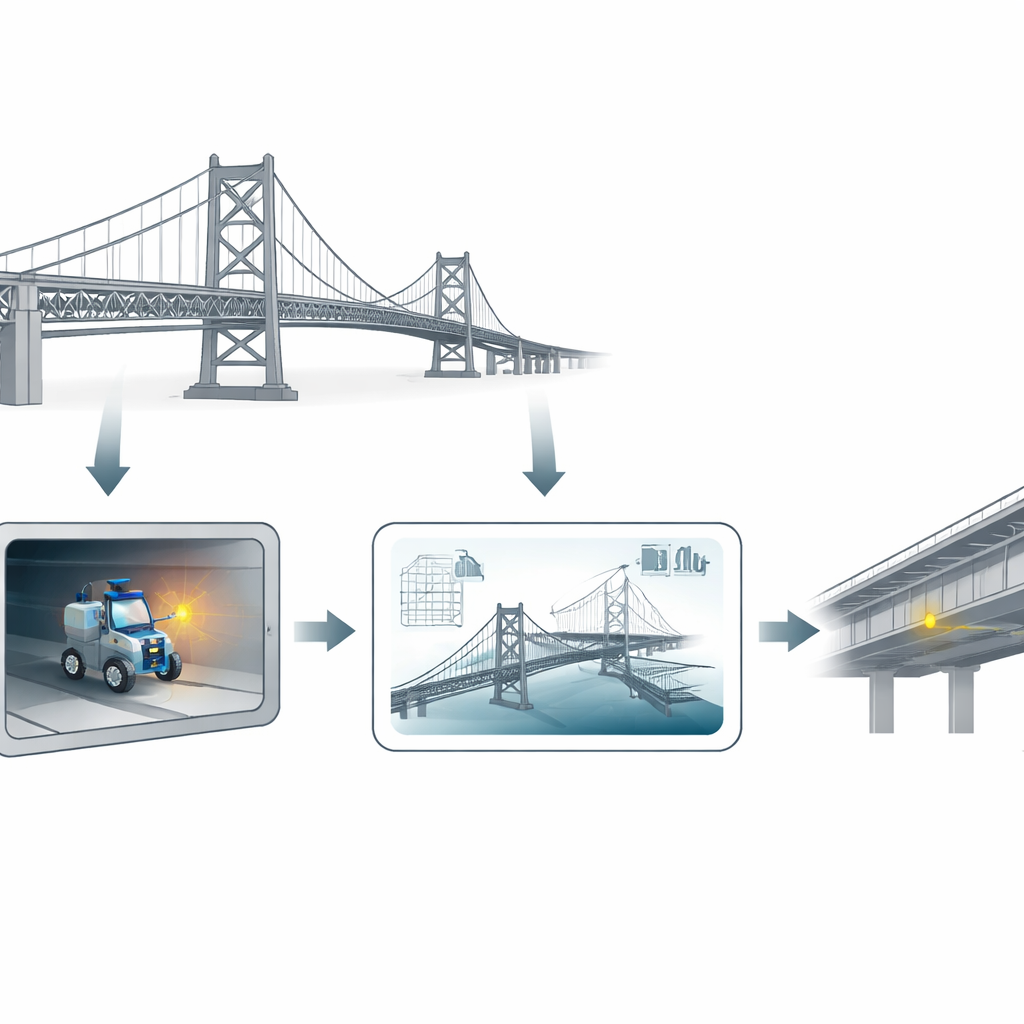
Long-span steel bridges are the backbone of modern transportation, carrying thousands of vehicles every day. Over years of traffic, tiny cracks can slowly grow in their steel decks, eventually threatening safety and forcing costly repairs or closures. Today, most of these cracks are still found by people crawling through cramped steel boxes with flashlights and cameras. This paper presents a new way to watch over aging steel bridges: a closed-loop system that lets robots find and measure cracks, and a virtual “twin” of the bridge forecast how those cracks will grow, so maintenance can be planned before trouble strikes.
Robots that crawl inside steel boxes
Inside many long-span bridges, the roadway is supported by orthotropic steel decks—thin steel plates stiffened by closely spaced ribs and diaphragms. The welded joints at these connections are notorious for developing thousands of fatigue cracks over a bridge’s life. Inspecting them by hand is slow, uncomfortable, and easy to miss details. The authors designed a compact robot with magnetic wheels that can cling to steel surfaces and navigate inside the enclosed box girders. A small robotic arm carries a high-resolution camera, which scans along weld lines while onboard software automatically highlights even hairline cracks in the images. In lab tests, the robot’s position inside the girder could be tracked to within a few centimeters, accurate enough to know exactly which weld a crack belongs to and where along that weld it lies.
A living digital twin of the bridge
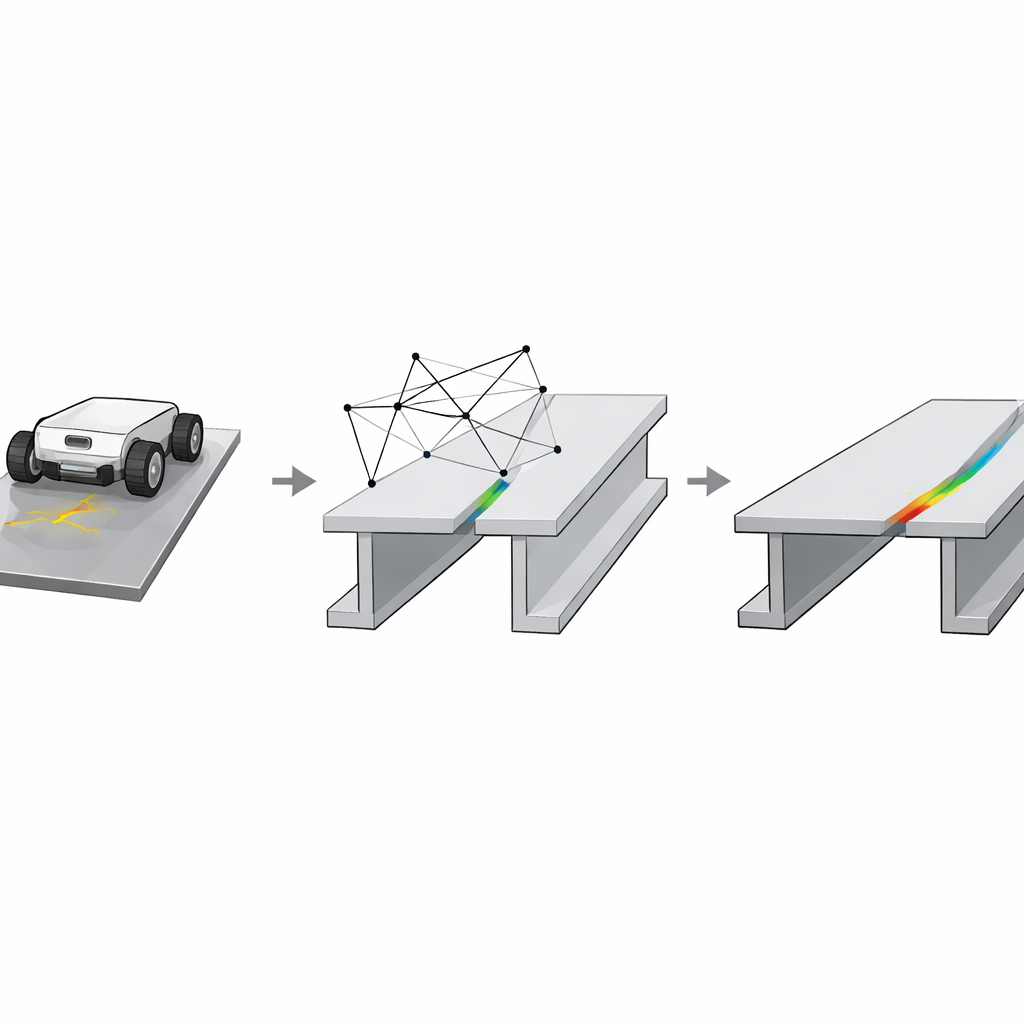
Finding cracks is only part of the story; knowing what they mean for the bridge’s future is just as important. To do this, the researchers link the robot’s measurements to a detailed computer replica of the bridge, known as a digital twin. Every identified crack is converted from a camera image into a clean centerline, then mapped into a three-dimensional model of the deck and ribs. Around each crack, the model automatically refines its virtual mesh and simulates how traffic loads—based on national design codes—concentrate stress at the crack front. By applying established fracture-mechanics laws, the twin can then “age” the bridge in silico, predicting how far and how fast each crack is likely to grow under repeated truck passages and how much fatigue life remains before a repair becomes urgent.
A loop that learns from real cracks
The framework does not stop at one-way prediction. After a period of service, the robot can be sent back to the same welds and the new crack shapes compared with what the digital twin had forecast. The authors developed mathematical measures that compare the observed and predicted crack skeletons point by point, tracking both how far they differ and how much the crack direction has deflected. These differences are then interpreted in terms of the underlying mix of opening and shearing forces at the crack front. Where the twin and the real crack line up closely, confidence in the model is high. Where they diverge—especially in zones dominated by shear—the system flags higher uncertainty, signaling that more frequent inspection or conservative maintenance planning is wise.
From laboratory tests to a real bridge
The team first validated the robot in a laboratory segment that mimicked the box-shaped interior of a real bridge. Tests showed strong magnetic adhesion, smooth motion over vertical and horizontal surfaces, and clear weld images with sub‑millimeter crack visibility. Positioning errors stayed mostly below 2 centimeters, comfortably within the spacing between weld lines. They then deployed the system inside a 15‑year‑old cable-stayed bridge in China. Compared with conventional manual work, the robotic inspection cut the average inspection time per girder from about two hours to under one hour. Crack lengths measured from the images matched manual ground truth within roughly ten percent for most samples. When these cracks were fed into the digital twin, surface diaphragm cracks were reproduced with only millimeter-scale deviation, while more complex deck-rib cracks showed larger differences that grew with the influence of shear forces.
What this means for everyday bridge safety
For non-specialists, the key message is that the study points toward bridges that can “tell” engineers not just where they are cracked, but how worried to be about each crack and how that concern will evolve over time. By marrying robotic inspection with a physics-based digital twin, the framework turns sporadic visual checks into a data-rich, repeating loop: robots gather crack data, the twin projects future growth, inspections and repairs are scheduled accordingly, and the next round of measurements feeds back to judge and refine those projections. While more testing on different bridges is needed, this approach promises safer, more resilient infrastructure, reduced reliance on slow manual surveys, and maintenance that stays one step ahead of hidden damage rather than one step behind it.
Citation: Li, X., Fu, Z., Guo, H. et al. A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges. Commun Eng 5, 76 (2026). https://doi.org/10.1038/s44172-026-00637-0
Keywords: steel bridge fatigue, robotic inspection, digital twin, structural health monitoring, crack growth prediction