Clear Sky Science · pl
Zamknięta pętla łącząca inspekcję robotyczną i cyfrowe bliźniaki w prognozowaniu zmęczeniowym eksploatowanych mostów stalowych
Dlaczego bezpieczeństwo dużych mostów ma znaczenie
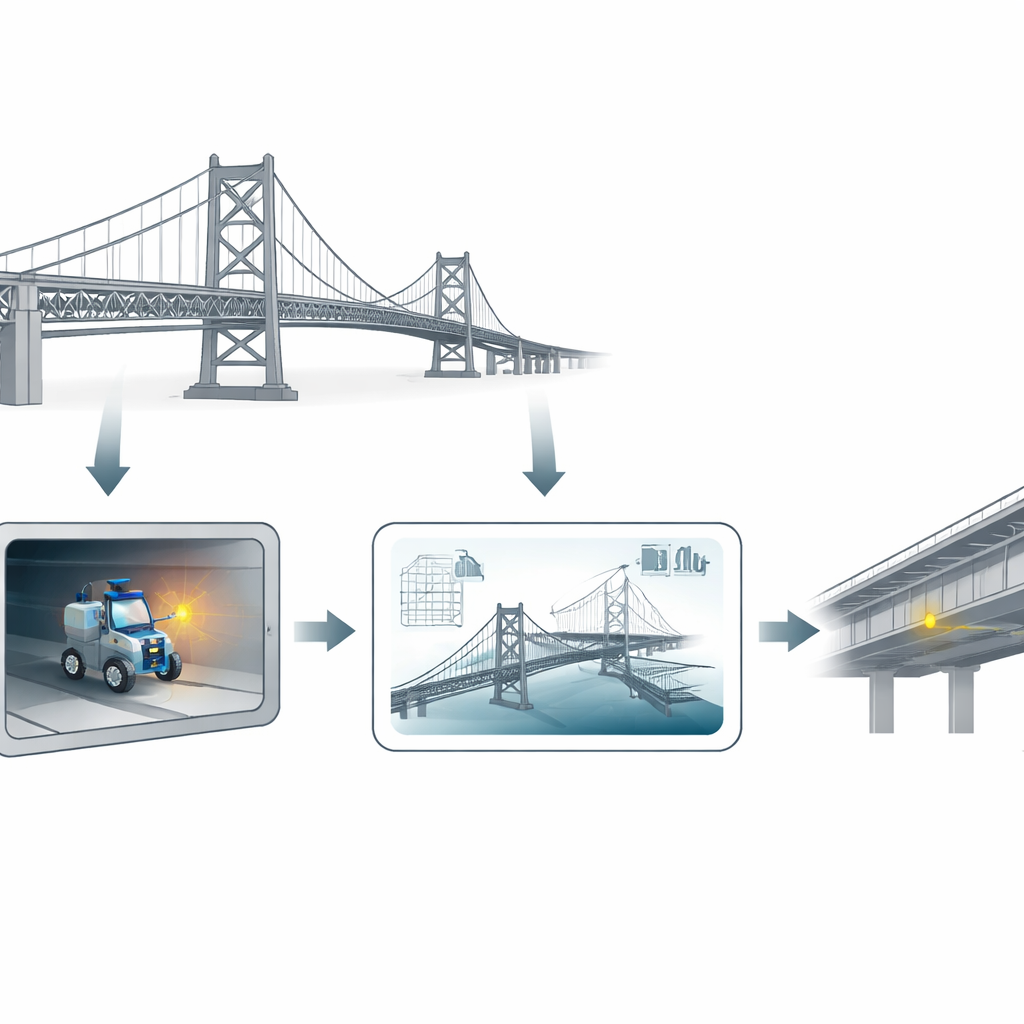
Długodystansowe mosty stalowe są kręgosłupem współczesnego transportu, przewożąc codziennie tysiące pojazdów. W wyniku wieloletniego ruchu drobne pęknięcia mogą stopniowo rozwijać się w stalowych częściach mostu, ostatecznie zagrażając bezpieczeństwu i wymuszając kosztowne naprawy lub zamknięcia. Obecnie większość takich pęknięć wykrywają nadal inspektorzy pełzający po ciasnych skrzyniach stalowych z latarkami i kamerami. W artykule przedstawiono nowe podejście do nadzoru starzejących się mostów stalowych: system zamkniętej pętli, w którym roboty wykrywają i mierzą pęknięcia, a wirtualny „bliźniak” mostu prognozuje ich rozwój, tak by konserwację można było zaplanować zanim pojawi się poważny problem.
Roboty pełzające wewnątrz stalowych skrzyń
We wnętrzu wielu długich mostów jezdnia oparta jest na ortotropowych pokładach stalowych — cienkich płyt stalowych usztywnionych gęsto rozmieszczonymi żebrami i przegrodami. Spawane połączenia w tych miejscach są znane z tego, że w ciągu życia mostu pojawia się w nich wiele pęknięć zmęczeniowych. Inspekcja ręczna jest wolna, niewygodna i łatwo przeoczyć detale. Autorzy zaprojektowali kompaktowego robota z magnetycznymi kołami, który przyczepia się do stalowych powierzchni i porusza po wnętrzu zamkniętych dźwigarów skrzyniowych. Mały ramię robotyczne niesie kamerę o wysokiej rozdzielczości, która skanuje wzdłuż linii spawów, podczas gdy oprogramowanie pokładowe automatycznie uwydatnia nawet najcieńsze pęknięcia na obrazach. W testach laboratoryjnych pozycję robota wewnątrz dźwigara udało się śledzić z dokładnością do kilku centymetrów, co wystarcza, by precyzyjnie określić, do którego spawu należy pęknięcie i gdzie dokładnie wzdłuż tego spawu się znajduje.
Żywy cyfrowy bliźniak mostu
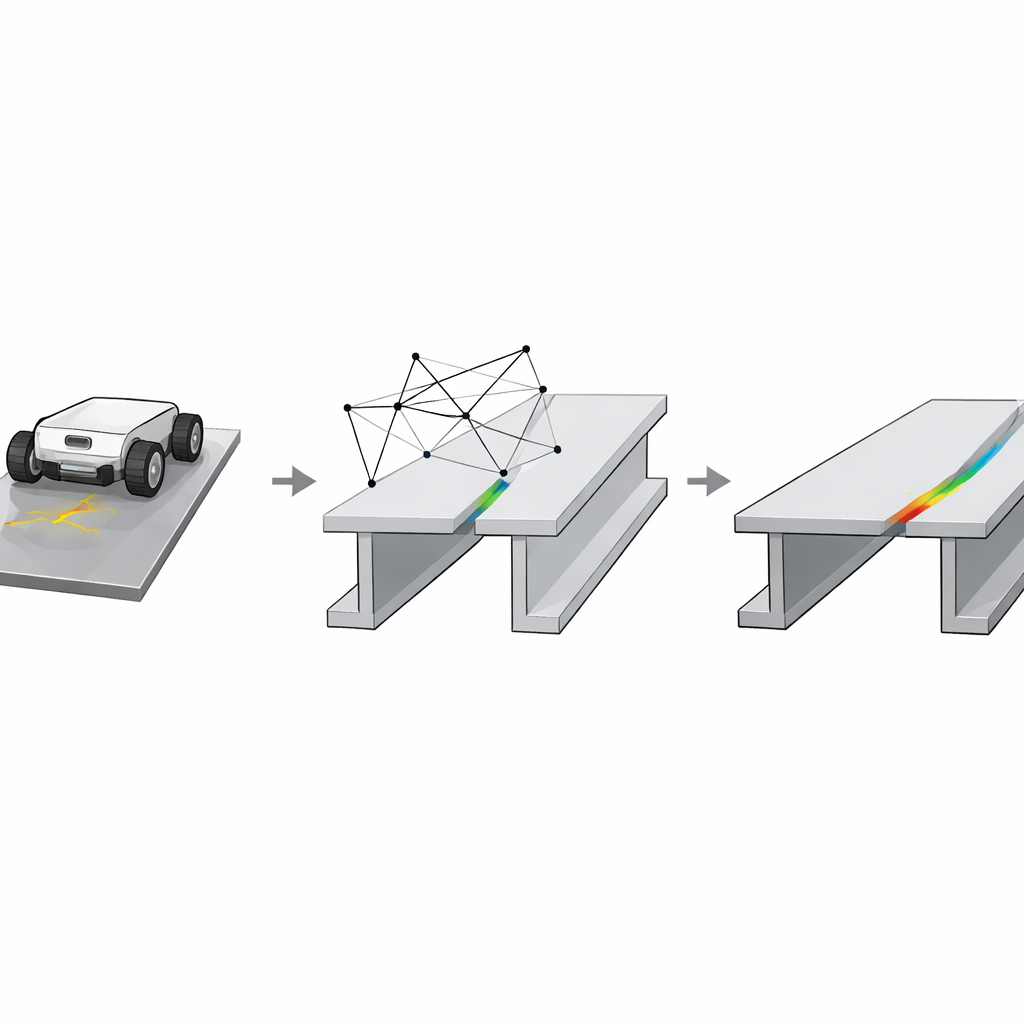
Wykrycie pęknięć to tylko część historii; równie ważne jest rozumienie, co one oznaczają dla przyszłości mostu. Aby to osiągnąć, badacze łączą pomiary robota ze szczegółową komputerową repliką mostu, znaną jako cyfrowy bliźniak. Każde zidentyfikowane pęknięcie jest przekształcane z obrazu kamery w czystą linię środkową, a następnie mapowane do trójwymiarowego modelu pokładu i żeber. Wokół każdego pęknięcia model automatycznie zagęszcza wirtualną siatkę i symuluje, jak obciążenia od ruchu — oparte na krajowych normach projektowych — koncentrują naprężenia na czołowej krawędzi pęknięcia. Stosując ustalone prawa mechaniki pękania, bliźniak może następnie „starzeć” most w środowisku symulowanym, przewidując, jak daleko i jak szybko każde pęknięcie prawdopodobnie się rozrośnie pod wpływem wielokrotnych przejazdów ciężarówek oraz ile życia zmęczeniowego pozostaje, zanim naprawa stanie się pilna.
Pętla ucząca się z rzeczywistych pęknięć
Ramy działania nie kończą się na jednokierunkowej prognozie. Po pewnym okresie eksploatacji robota można wysłać ponownie do tych samych spawów, a nowe kształty pęknięć porównać z tym, co przewidział cyfrowy bliźniak. Autorzy opracowali miary matematyczne porównujące obserwowane i prognozowane szkielety pęknięć punkt po punkcie, śledząc zarówno odległość ich rozbieżności, jak i odchylenie kierunku pęknięcia. Różnice te są następnie interpretowane w kontekście mieszanki sił rozciągających i ścinających działających na czoło pęknięcia. Tam, gdzie bliźniak i rzeczywiste pęknięcie pokrywają się ściśle, zaufanie do modelu jest wysokie. Gdzie się rozjeżdżają — szczególnie w strefach zdominowanych przez ścinanie — system sygnalizuje większą niepewność, sugerując częstsze inspekcje lub ostrożniejsze planowanie konserwacji.
Od testów laboratoryjnych do realnego mostu
Zespół najpierw zweryfikował robota w segmencie laboratoryjnym naśladującym wnętrze skrzyni prawdziwego mostu. Testy wykazały silne przyczepianie magnetyczne, płynny ruch po powierzchniach pionowych i poziomych oraz wyraźne obrazy spawów z widocznością pęknięć podmilimetrowych. Błędy pozycjonowania utrzymywały się głównie poniżej 2 centymetrów, co z nawiązką mieściło się w odległościach między liniami spawów. Następnie wdrożyli system wewnątrz 15-letniego mostu wantowego w Chinach. W porównaniu z konwencjonalną pracą ręczną inspekcja robotyczna skróciła średni czas inspekcji na dźwigar z około dwóch godzin do poniżej jednej godziny. Długości pęknięć zmierzone na obrazach zgadzały się z pomiarami referencyjnymi w przybliżeniu w granicach dziesięciu procent dla większości próbek. Gdy te pęknięcia wprowadzono do cyfrowego bliźniaka, pęknięcia w przegrodach powierzchniowych odtworzono z odchyleniem rzędu milimetrów, podczas gdy bardziej złożone pęknięcia między pokładem a żebrami wykazały większe różnice, które narastały wraz z wpływem sił ścinających.
Co to oznacza dla codziennego bezpieczeństwa mostów
Dla osób niebędących specjalistami kluczowy przekaz jest taki, że badanie wskazuje drogę do mostów, które mogą „powiedzieć” inżynierom nie tylko gdzie są pęknięcia, ale też jak bardzo należy się nimi martwić i jak ta obawa będzie ewoluować w czasie. Poprzez połączenie inspekcji robotycznej z opartym na fizyce cyfrowym bliźniakiem, ramy zmieniają sporadyczne kontrole wzrokowe w bogatą w dane, powtarzalną pętlę: roboty zbierają dane o pęknięciach, bliźniak prognozuje przyszły rozwój, inspekcje i naprawy są planowane odpowiednio, a następna runda pomiarów służy do oceny i udoskonalenia tych prognoz. Chociaż potrzebne są dalsze testy na różnych mostach, podejście to obiecuje bezpieczniejszą, bardziej odporną infrastrukturę, mniejsze poleganie na powolnych ręcznych przeglądach i utrzymanie, które zgarnia przewagę nad ukrytymi uszkodzeniami zamiast ją tracić.
Cytowanie: Li, X., Fu, Z., Guo, H. et al. A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges. Commun Eng 5, 76 (2026). https://doi.org/10.1038/s44172-026-00637-0
Słowa kluczowe: zmęczenie mostu stalowego, inspekcja robotyczna, cyfrowy bliźniak, monitoring stanu technicznego, predykcja wzrostu pęknięć