Clear Sky Science · sv
En sluten återkopplingsram som integrerar robotinspektion och digitala tvillingar för trötthetsprognoser av stålkonstruktioner i bruk
Varför det är viktigt att hålla stora broar säkra
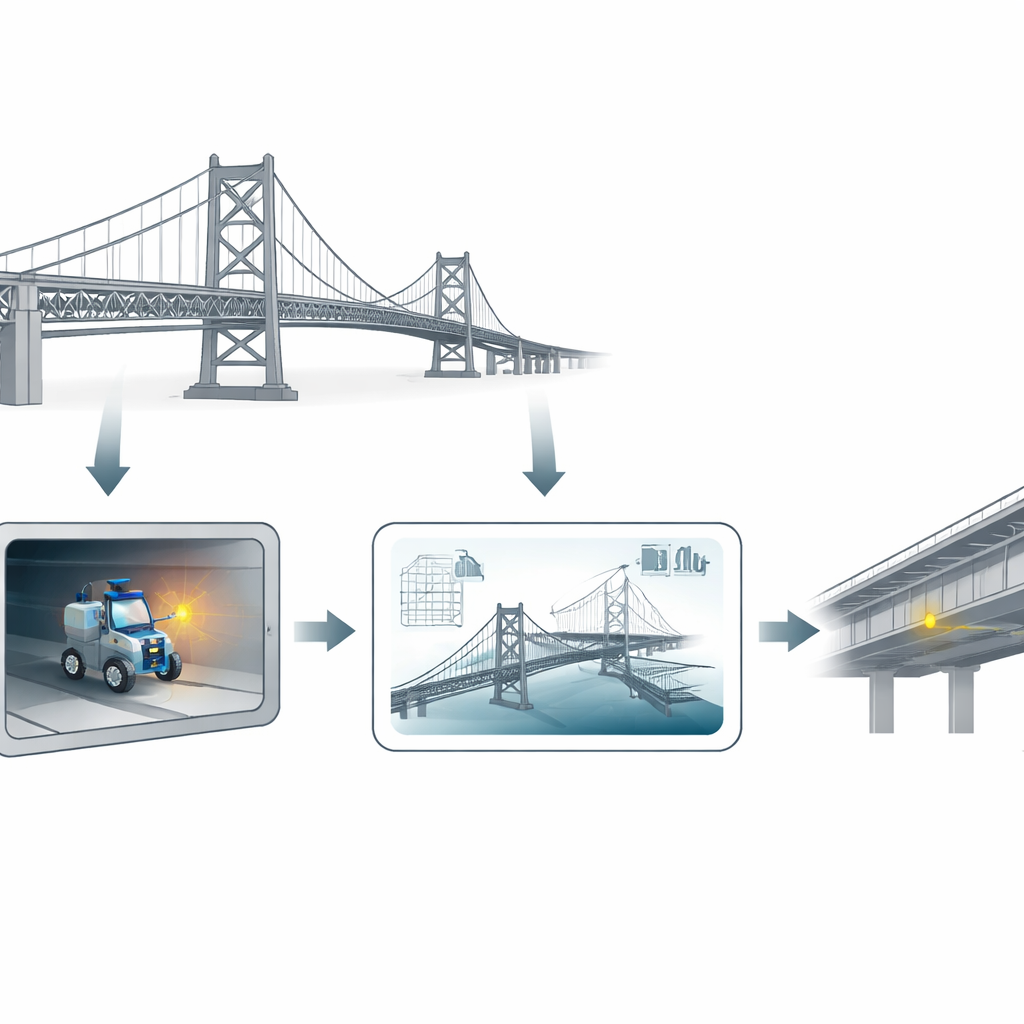
Långspända stålkonstruktioner är ryggraden i modern trafik och bär tusentals fordon varje dag. Under år av trafik kan mikrosprickor långsamt växa i ståldäcken och så småningom hota säkerheten och tvinga fram kostsamma reparationer eller avstängningar. Idag upptäcks de flesta av dessa sprickor fortfarande av människor som kryper genom trånga stålboxar med ficklampor och kameror. Denna artikel presenterar ett nytt sätt att övervaka åldrande stålkonstruktioner: ett slutet kretslopp som låter robotar hitta och mäta sprickor, och en virtuell ”tvilling” av bron som förutspår hur sprickorna kommer att växa, så att underhåll kan planeras innan problem uppstår.
Robotar som kryper inuti stålboxar
Inuti många långspända broar stöds körbanan av ortotropiska ståldäck — tunna stålplåtar förstärkta med tätt placerade ribbor och diaphragma. De svetsade fogarna vid dessa anslutningar är beryktade för att utveckla tusentals trötthetssprickor under en brors livslängd. Att inspektera dem för hand är långsamt, obekvämt och lätt att missa detaljer. Författarna har konstruerat en kompakt robot med magnetiska hjul som kan fästa vid stålytor och navigera inne i de slutna boxbalkarna. En liten robotarm bär en högupplöst kamera som skannar längs svetsfogar medan ombordprogramvara automatiskt markerar även hårfina sprickor i bilderna. I laboratorietest kunde robotens position inne i balken spåras med en felmarginal på några centimeter, tillräckligt noggrant för att veta exakt vilken svets en spricka hör till och var längs den svetsen den ligger.
En levande digital tvilling av bron
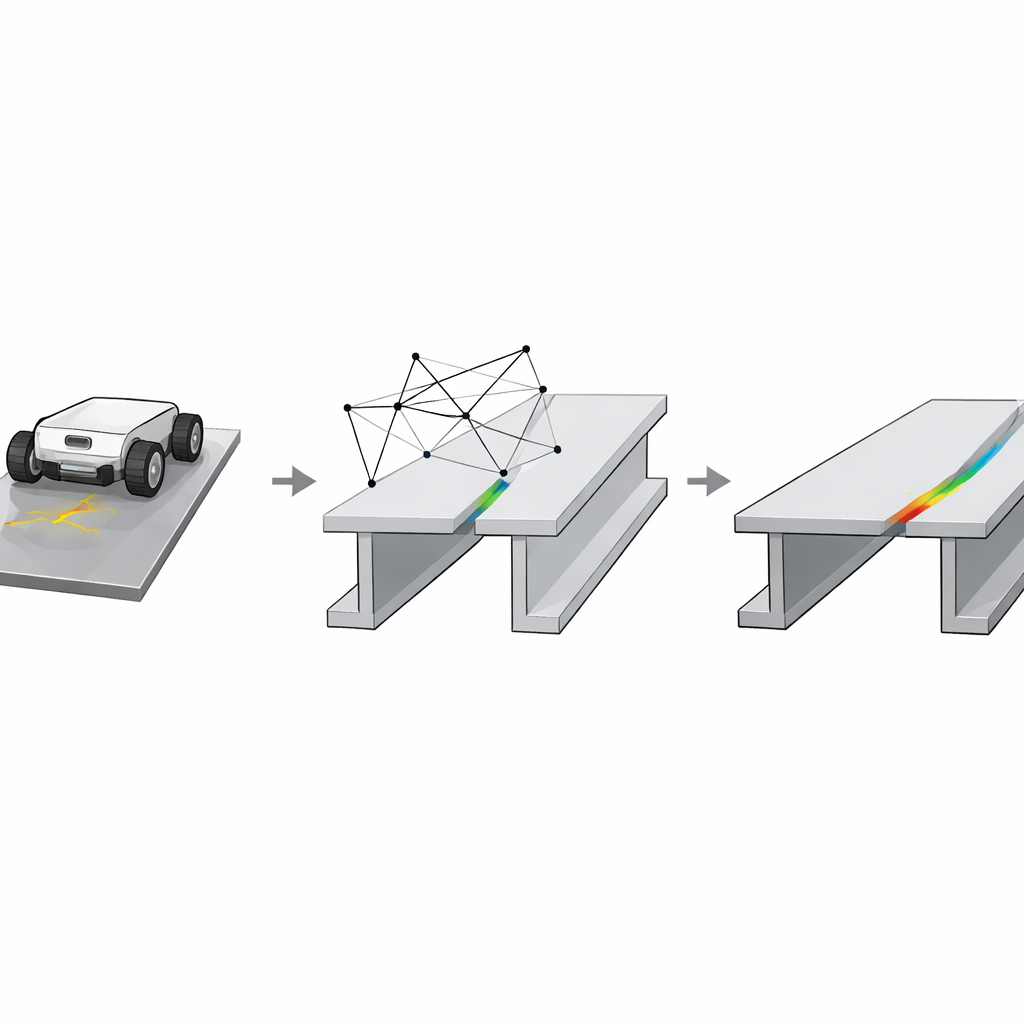
Att hitta sprickor är bara en del av berättelsen; att veta vad de betyder för brons framtid är lika viktigt. För detta kopplar forskarna robotens mätningar till en detaljerad datorrepresentation av bron, känd som en digital tvilling. Varje identifierad spricka omvandlas från en kamerabild till en ren mittlinje och kartläggs sedan in i en tredimensionell modell av däck och ribbor. Runt varje spricka förfinar modellen automatiskt sin virtuella mask och simulerar hur trafiklast — baserad på nationella konstruktionsregler — koncentrerar spänningar vid sprickfronten. Genom att tillämpa etablerade brottmekaniska lagar kan tvillingen därefter åldra bron in silico och förutsäga hur långt och hur snabbt varje spricka sannolikt kommer att växa under upprepade lastpassager och hur mycket trötthetsliv som återstår innan en reparation blir brådskande.
Ett kretslopp som lär av verkliga sprickor
Ramen stannar inte vid envägsprediktion. Efter en period i drift kan roboten skickas tillbaka till samma svetsar och de nya sprickformerna jämföras med vad den digitala tvillingen förutspådde. Författarna utvecklade matematiska mått som jämför observerade och förutsagda sprickskelett punkt för punkt, och spårar både hur långt de skiljer sig åt och hur mycket sprickriktningen har avvikit. Dessa skillnader tolkas sedan i termer av den underliggande mixen av öppnings- och skjuvkrafter vid sprickfronten. Där tvillingen och den verkliga spricklinjen ligger tätt intill varandra är förtroendet för modellen högt. Där de avviker — särskilt i zoner dominerade av skjuvning — flaggar systemet högre osäkerhet, vilket signalerar att tätare inspektion eller konservativare underhållsplanering är klokt.
Från laboratorietester till en riktig bro
Teamet validerade först roboten i ett laboratorieavsnitt som imiterade den boxformade insidan av en verklig bro. Tester visade stark magnetisk vidhäftning, jämn rörelse över vertikala och horisontella ytor, och tydliga svetsbilder med spricksynlighet i submillimeternivå. Positionsfelen hölls mestadels under 2 centimeter, bekvämt inom avståndet mellan svetslinjerna. De satte sedan upp systemet inne i en 15 år gammal pylonbro i Kina. Jämfört med konventionellt manuellt arbete minskade robotinspektionen den genomsnittliga inspektionstiden per balk från cirka två timmar till under en timme. Spricklängder mätta från bilderna stämde överens med manuell referensdata inom ungefär tio procent för de flesta prov. När dessa sprickor matades in i den digitala tvillingen reproducerades sprickor i ytdiaphragman med endast millimeternivåavvikelse, medan mer komplexa sprickor mellan däck och ribbor visade större skillnader som ökade med skjuvkrafternas påverkan.
Vad detta innebär för vardaglig brossäkerhet
För icke-specialister är huvudbudskapet att studien pekar mot broar som kan ”berätta” för ingenjörer inte bara var de är spruckna, utan hur bekymrade man bör vara över varje spricka och hur den oron kommer att utvecklas över tid. Genom att förena robotinspektion med en fysikbaserad digital tvilling förvandlar ramen sporadiska visuella kontroller till ett datafattigt, återkommande kretslopp: robotar samlar sprickdata, tvillingen projicerar framtida tillväxt, inspektioner och reparationer schemaläggs därefter, och nästa mätomgång återkopplas för att bedöma och förfina de prognoserna. Medan fler tester på olika broar krävs, lovar detta tillvägagångssätt säkrare, mer robust infrastruktur, minskat beroende av långsamma manuella undersökningar och underhåll som ligger ett steg före dold skada snarare än ett steg efter den.
Citering: Li, X., Fu, Z., Guo, H. et al. A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges. Commun Eng 5, 76 (2026). https://doi.org/10.1038/s44172-026-00637-0
Nyckelord: trötthet i stålkonstruktioner, robotinspektion, digital tvilling, övervakning av strukturell hälsa, spricktillväxtprognos