Clear Sky Science · ja
稼働中の鋼橋の疲労予後のためのロボット検査とデジタルツインを統合する閉ループフレームワーク
大きな橋の安全を守ることが重要な理由
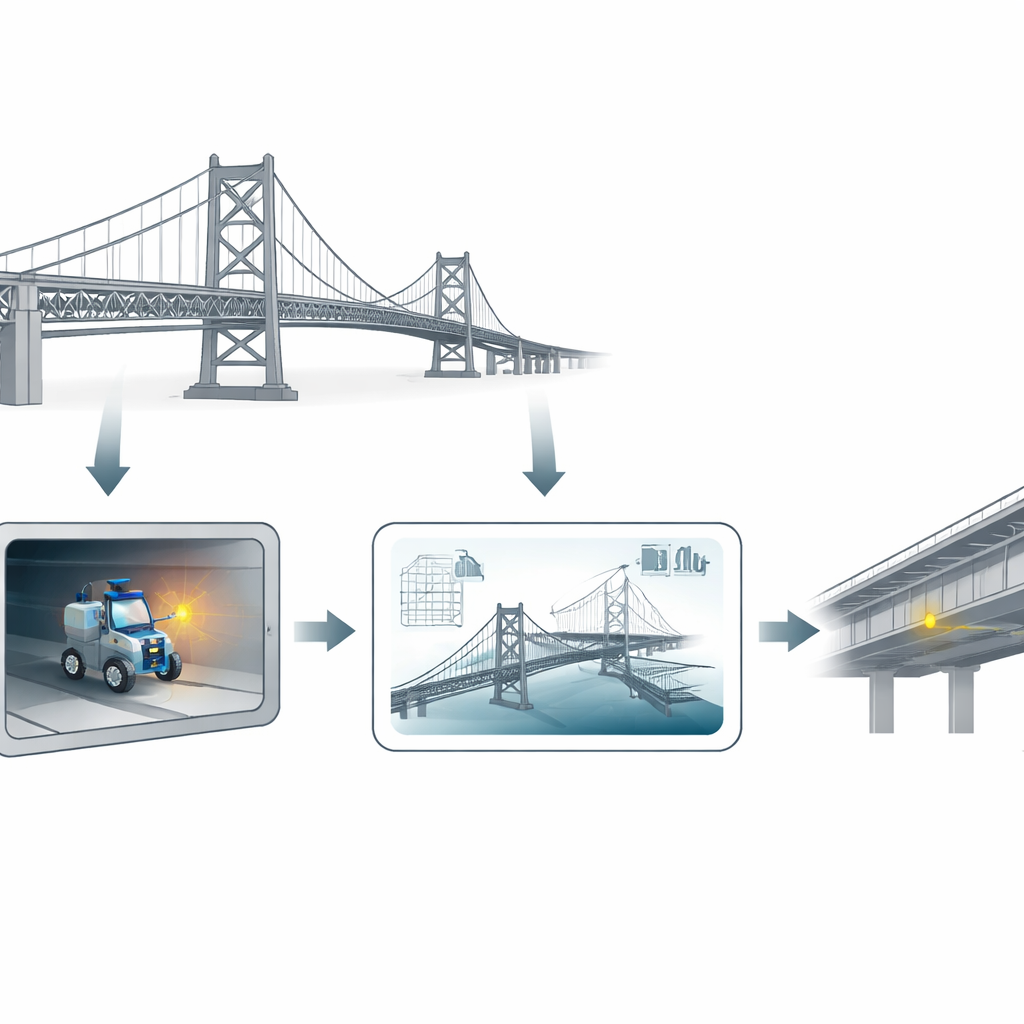
長大スパンの鋼橋は現代の交通網の要であり、日々何千台もの車両を支えています。長年の交通により、鋼床版に生じた微小な亀裂はゆっくりと成長し、やがて安全を脅かし、大規模な補修や通行止めを招くことがあります。現在でも多くの亀裂は、人が狭い鋼製箱桁内部を懐中電灯やカメラを持って這い回りながら発見しています。本論文は、老朽化した鋼橋を監視する新しい手法を示します。ロボットが亀裂を検出・計測し、橋の仮想“ツイン”がその亀裂の成長を予測する閉ループシステムにより、問題が顕在化する前に保守を計画できるようにするものです。
鋼製箱桁内を這うロボット
多くの長大橋では、路面は薄い鋼板に多数のリブやダイアフラムを配した直交異方性鋼床版で支えられています。これらの接合部の溶接継手は、橋の寿命にわたって数千の疲労亀裂が発生しやすいことで知られています。手作業による検査は遅く、過酷で、見落としが生じやすい。本研究の著者らは、鋼面に吸着して箱桁内部を移動できる磁気ホイールを備えたコンパクトなロボットを設計しました。小型のロボットアームには高解像度カメラが搭載され、溶接線に沿って走査し、搭載ソフトウェアが画像中の微細な亀裂まで自動的に強調表示します。実験室試験では、ロボットの桁内部での位置は数センチメートル以内に追跡でき、どの溶接継手にどの位置の亀裂があるかを正確に特定するのに十分な精度が得られました。
橋の生きたデジタルツイン
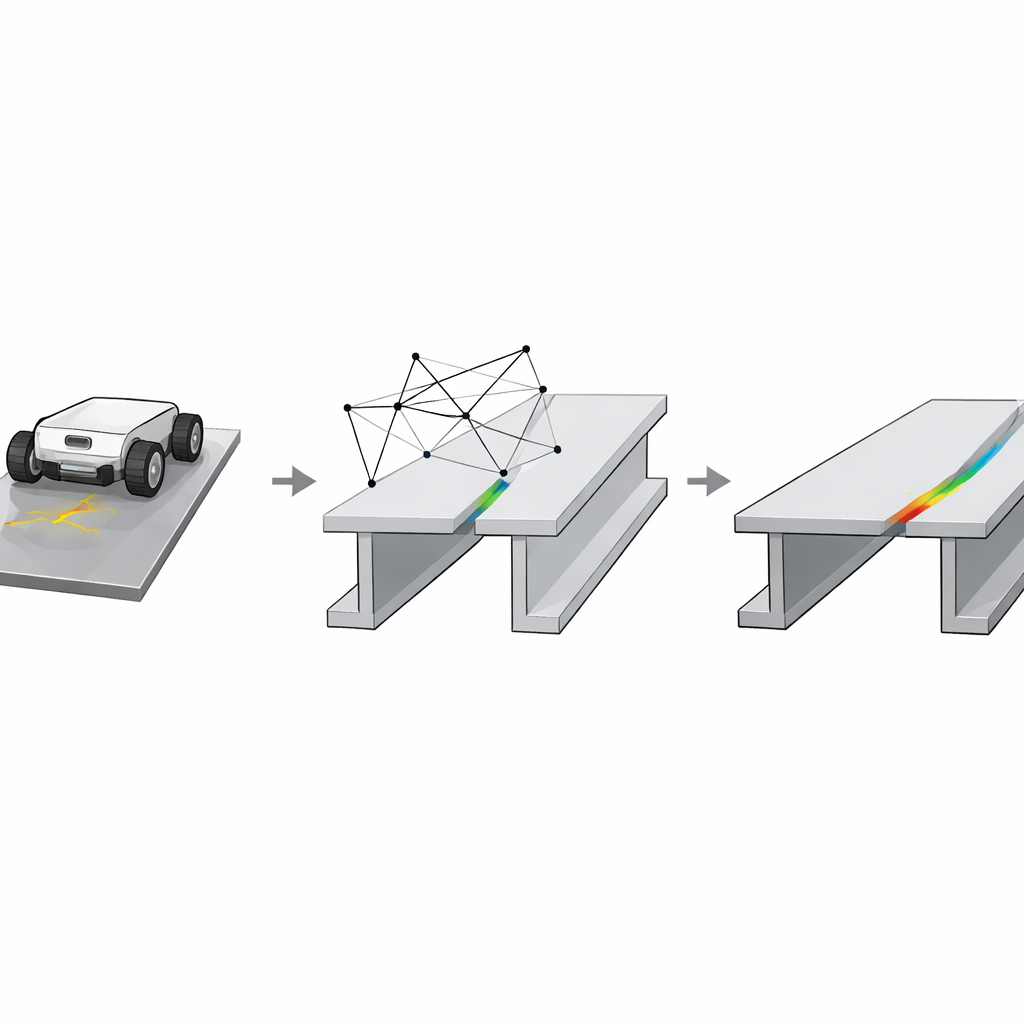
亀裂を見つけることは一部に過ぎません。それが橋の将来にとって何を意味するかを知ることが同じくらい重要です。そのため研究者たちはロボットの計測を橋の詳細な計算機レプリカ、すなわちデジタルツインに結び付けます。特定されたすべての亀裂はカメラ画像から中心線として抽出され、床版とリブの三次元モデルにマッピングされます。各亀裂の周辺ではモデルが自動的にメッシュを細分化し、国の設計基準に基づく交通荷重が亀裂先端にどのように応力を集中させるかをシミュレートします。確立された破壊力学則を適用することで、ツインは橋をインシリコで“老化”させ、繰り返し通過するトラック荷重の下で各亀裂がどれだけ、どの速さで進展する可能性があるか、補修が緊急になるまでに残る疲労寿命を予測できます。
実際の亀裂から学ぶループ
フレームワークは一方向の予測にとどまりません。一定期間の運用後、ロボットを同じ溶接部へ再び送り、観測された新しい亀裂形状をデジタルツインの予測と比較できます。著者らは観測された亀裂の骨格と予測を点ごとに比較する数学的指標を開発し、両者がどれだけ離れているかと亀裂の進行方向がどれほど偏向しているかを追跡します。これらの差異は亀裂先端での開口力(モードI)とすべり(せん断)力(モードII/III)の寄与として解釈されます。ツインと実際の亀裂が良く一致する箇所ではモデルへの信頼度は高く、特にせん断が支配的な領域で不一致が大きい場合には不確かさが高いとしてシステムが警告し、より頻繁な検査や保守計画の保守的な立て方を示唆します。
実験室試験から実橋へ
チームはまず箱形の橋内部を模した実験室セグメントでロボットを検証しました。試験では強力な磁着、垂直・水平面での滑らかな移動、亀裂のサブミリメートル視認性を伴う明瞭な溶接画像が確認されました。位置決め誤差は概ね2センチメートル未満に収まり、溶接線間隔に対して十分な精度でした。その後、中国の築15年の斜張橋内にシステムを展開しました。従来の手作業と比べ、ロボット検査は1桁当たりの平均検査時間を約2時間から1時間未満に短縮しました。画像から計測した亀裂長は、大部分のサンプルで手動による基準値と概ね10パーセント以内で一致しました。これらの亀裂をデジタルツインに入力したところ、面ダイアフラム上の亀裂はミリメートルスケールの偏差にとどまり再現されましたが、床版とリブにまたがるより複雑な亀裂はせん断の影響が大きくなるにつれて差異が拡大しました。
日常の橋の安全性にとっての意義
専門外の読者に向けた主要なメッセージは、本研究が橋がどこに亀裂があるかを“教える”だけでなく、各亀裂についてどの程度懸念すべきか、そしてその懸念が時間とともにどう変わるかを示す方向を指し示しているという点です。ロボット検査を物理に基づくデジタルツインと組み合わせることで、このフレームワークは断続的な目視点検をデータに富む反復ループへと変換します。ロボットが亀裂データを収集し、ツインが将来の成長を予測し、検査と補修がそれに応じて計画され、次の計測ラウンドがその予測を評価・洗練します。異なる橋でのさらなる試験は必要ですが、この手法はより安全で回復力のあるインフラ、遅い手作業点検への依存の軽減、隠れた損傷よりも一歩先を行く保守を実現する可能性を秘めています。
引用: Li, X., Fu, Z., Guo, H. et al. A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges. Commun Eng 5, 76 (2026). https://doi.org/10.1038/s44172-026-00637-0
キーワード: 鋼橋の疲労, ロボット検査, デジタルツイン, 構造ヘルスモニタリング, 亀裂成長予測