Clear Sky Science · de
Ein geschlossenes Regelkreissystem, das robotische Inspektion und digitale Zwillinge zur Ermüdungsprognose von im Betrieb befindlichen Stahlbrücken integriert
Warum die Sicherheit großer Brücken wichtig ist
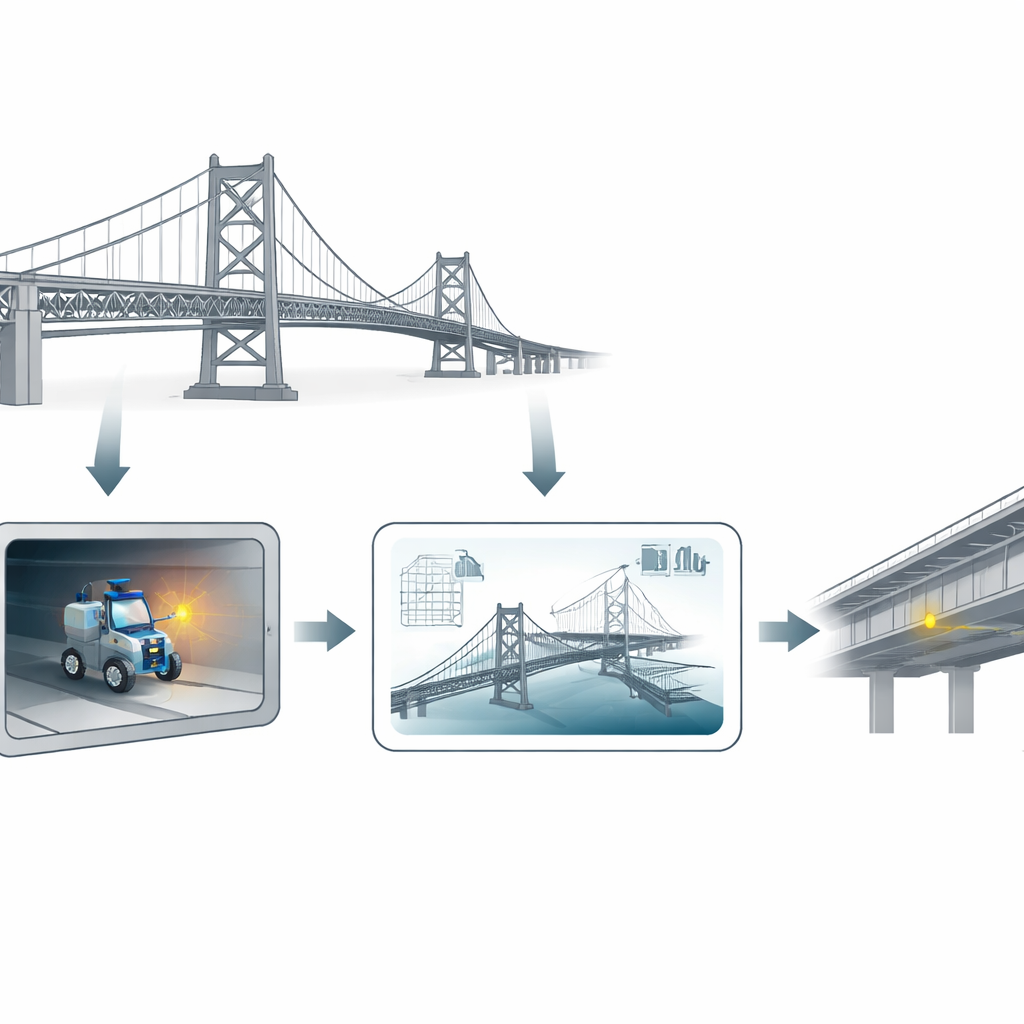
Langfeldige Stahlbrücken sind das Rückgrat moderner Verkehrsinfrastruktur und tragen täglich tausende Fahrzeuge. Im Laufe der Jahre können sich in ihren Stahlbelägen winzige Risse langsam vergrößern, die schließlich die Sicherheit gefährden und teure Reparaturen oder Sperrungen erzwingen. Bis heute werden viele dieser Risse noch von Menschen entdeckt, die mit Taschenlampen und Kameras durch enge Stahlkästen kriechen. Diese Arbeit stellt einen neuen Weg vor, alternde Stahlbrücken zu überwachen: ein geschlossenes System, das Robotern erlaubt, Risse zu finden und zu vermessen, und einen virtuellen „Zwilling“ der Brücke, der vorhersagt, wie diese Risse wachsen werden, damit die Instandhaltung geplant werden kann, bevor Probleme auftreten.
Roboter, die in Stahlkästen kriechen
Im Inneren vieler Langfeldbrücken wird die Fahrbahn von orthotropen Stahlbelägen getragen — dünne Stahlplatten, die durch dicht angeordnete Rippen und Diaphragmen versteift sind. Die geschweißten Anschlussstellen an diesen Versteifungen sind berüchtigt dafür, während der Lebensdauer einer Brücke tausende Ermüdungsrisse zu entwickeln. Die manuelle Inspektion ist langsam, unbequem und es ist leicht, Details zu übersehen. Die Autoren entwickelten einen kompakten Roboter mit magnetischen Rädern, der an Stahlflächen haften und sich innerhalb der geschlossenen Kastenträger fortbewegen kann. Ein kleiner Roboterarm trägt eine hochauflösende Kamera, die entlang der Schweißnähte scannt, während die Bordsoftware selbst Haarrisse in den Bildern automatisch hervorhebt. In Laborversuchen ließ sich die Position des Roboters im Träger auf wenige Zentimeter genau verfolgen — genau genug, um eindeutig zuzuordnen, zu welcher Naht ein Riss gehört und an welcher Stelle entlang dieser Naht er liegt.
Ein lebender digitaler Zwilling der Brücke
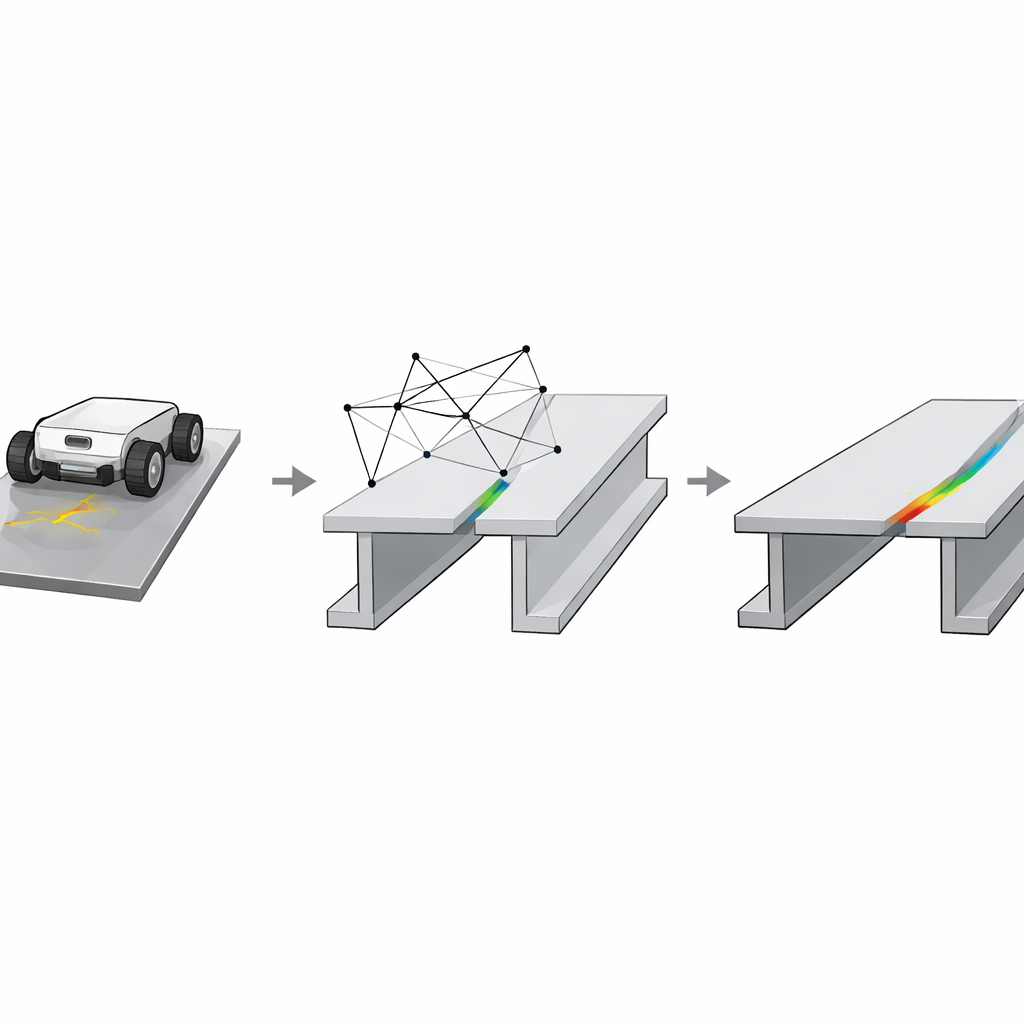
Risse zu finden ist nur ein Teil der Aufgabe; ebenso wichtig ist zu wissen, was sie für die Zukunft der Brücke bedeuten. Zu diesem Zweck koppeln die Forschenden die Messungen des Roboters mit einem detaillierten Computermodell der Brücke, bekannt als digitaler Zwilling. Jeder identifizierte Riss wird aus dem Kamerabild in eine saubere Mittellinie umgewandelt und dann in ein dreidimensionales Modell von Platte und Rippen eingetragen. Um jeden Riss herum verfeinert das Modell automatisch sein virtuelles Netz und simuliert, wie Verkehrsbelastungen — basierend auf nationalen Bemessungsvorschriften — die Spannung an der Rissfront konzentrieren. Durch Anwendung etablierter Bruchmechanikgesetze kann der Zwilling die Brücke in silico „altern“ lassen und vorhersagen, wie weit und wie schnell jeder Riss unter wiederholter Lkw‑Passage wahrscheinlich wachsen wird und wie viel Restermüdungslebensdauer verbleibt, bevor eine Reparatur dringlich wird.
Ein Kreislauf, der von realen Rissen lernt
Das Framework bleibt nicht bei eindimensionalen Vorhersagen stehen. Nach einer gewissen Betriebszeit kann der Roboter zu denselben Schweißnähten zurückgeschickt werden, und die neuen Rissformen werden mit den Vorhersagen des digitalen Zwillings verglichen. Die Autoren entwickelten mathematische Maße, die die beobachteten und vorhergesagten Rissskelette Punkt für Punkt vergleichen, wobei sowohl der Abstand als auch die Richtungsabweichung des Risses verfolgt werden. Diese Unterschiede werden dann im Hinblick auf die zugrunde liegende Mischung aus Öffnungs- und Scherkräften an der Rissfront interpretiert. Wo Zwilling und realer Riss gut übereinstimmen, ist das Vertrauen in das Modell hoch. Wo sie auseinanderlaufen — insbesondere in Zonen, die von Scherkräften dominiert werden —, signalisiert das System eine höhere Unsicherheit und empfiehlt häufigere Kontrollen oder konservativere Instandhaltungsplanung.
Von Labortests zu einer echten Brücke
Das Team validierte den Roboter zunächst in einem Laborsegment, das das kastige Innere einer realen Brücke nachbildete. Tests zeigten starke magnetische Haftung, gleichmäßige Bewegung über vertikale und horizontale Flächen und klare Schweißnahtbilder mit Sichtbarkeit von Rissen im Submillimeterbereich. Positionsfehler blieben größtenteils unter 2 Zentimetern, also komfortabel innerhalb des Abstands zwischen Schweißnähten. Anschließend setzten sie das System in einer 15 Jahre alten Schrägseilbrücke in China ein. Im Vergleich zur konventionellen manuellen Arbeit verringerte die robotische Inspektion die durchschnittliche Inspektionszeit pro Träger von etwa zwei Stunden auf unter eine Stunde. Die aus den Bildern gemessenen Risslängen stimmten bei den meisten Proben grob innerhalb von zehn Prozent mit den manuellen Referenzwerten überein. Wenn diese Risse in den digitalen Zwilling eingespeist wurden, wurden Risse an Flanschdiaphragmen mit nur millimetergenauer Abweichung reproduziert, während komplexere Risse zwischen Platte und Rippe größere Unterschiede zeigten, die mit wachsendem Einfluss von Scherkräften zunahmen.
Was das für die alltägliche Brückensicherheit bedeutet
Für Nichtfachleute ist die Kernbotschaft, dass die Studie in Richtung Brücken weist, die Ingenieuren nicht nur anzeigen, wo Risse vorhanden sind, sondern auch, wie besorgniserregend jeder einzelne Riss ist und wie sich diese Einschätzung über die Zeit entwickeln wird. Durch die Kombination robotischer Inspektion mit einem physikbasierten digitalen Zwilling verwandelt das Framework sporadische Sichtprüfungen in einen datenreichen, wiederholten Kreislauf: Roboter erfassen Rissdaten, der Zwilling projiziert zukünftiges Wachstum, Inspektionen und Reparaturen werden entsprechend geplant, und die nächste Messrunde fließt zurück, um diese Projektionen zu bewerten und zu verfeinern. Obwohl weitere Tests an unterschiedlichen Brückentypen nötig sind, verspricht dieser Ansatz sicherere, resilientere Infrastruktur, geringere Abhängigkeit von langsamen manuellen Untersuchungen und eine Instandhaltung, die verborgenen Schäden einen Schritt voraus ist, statt ihnen einen Schritt hinterherzulaufen.
Zitation: Li, X., Fu, Z., Guo, H. et al. A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges. Commun Eng 5, 76 (2026). https://doi.org/10.1038/s44172-026-00637-0
Schlüsselwörter: Stahlbrückenermüdung, robotische Inspektion, digitaler Zwilling, Überwachung der Bauwerkszustände, Risswachstumsprognose