Clear Sky Science · tr
Hizmetteki çelik köprülerin yorgunluk öngörüsü için robotik inceleme ve dijital ikizleri bütünleştiren kapalı döngü çerçevesi
Neden büyük köprülerin güvenliğini sağlamak önemli
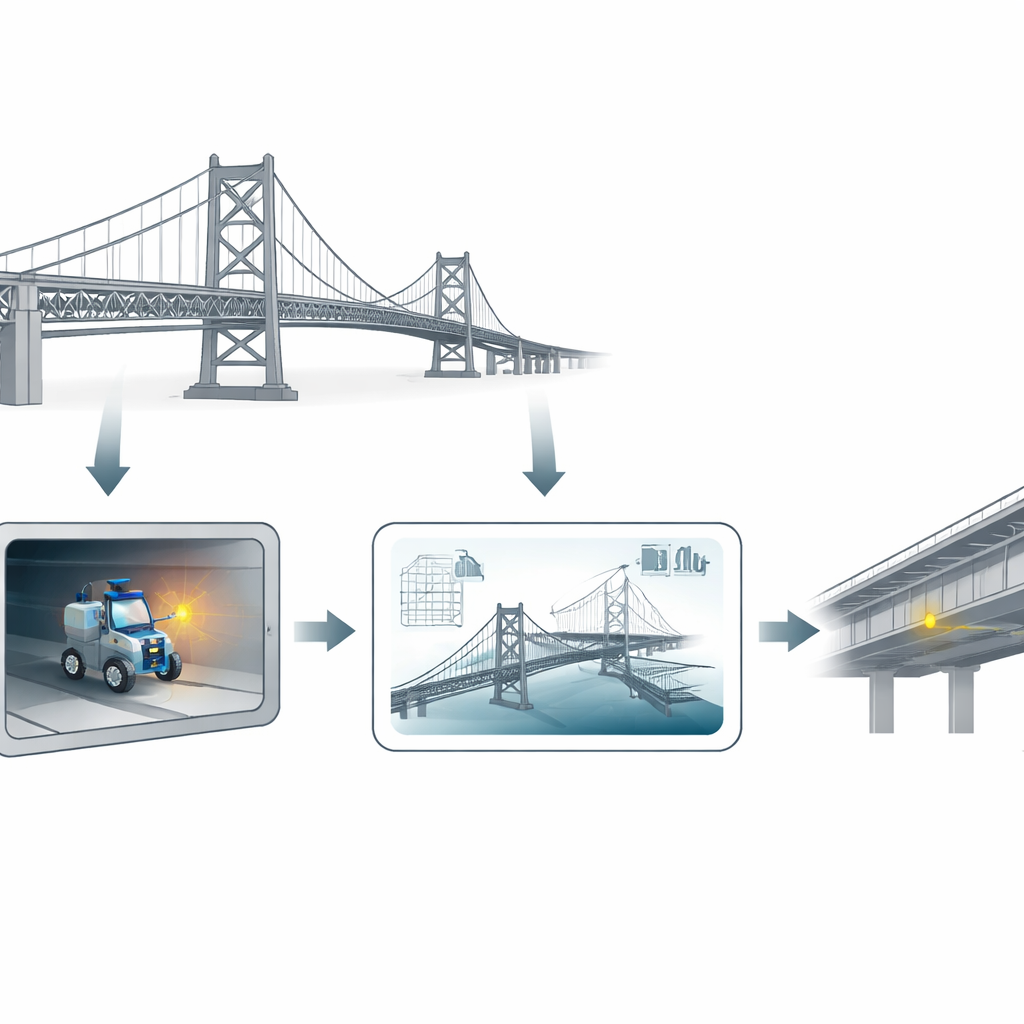
Uzun açıklıklı çelik köprüler modern ulaşımın belkemiğidir; her gün binlerce aracı taşırlar. Yıllar süren trafik altında, çelik döşemelerdeki ince çatlaklar yavaşça büyüyebilir, nihayetinde güvenliği tehdit ederek maliyetli onarımlar veya kapanmalara yol açabilir. Bugün bu çatlakların çoğu hâlâ insanları dar çelik kutuların içinde el feneri ve kamerayla sürünerek aramasıyla bulunuyor. Bu makale, yaşlanan çelik köprüleri izlemenin yeni bir yolunu sunuyor: robotların çatlakları bulup ölçmesine ve köprünün sanal “ikizinin” bu çatlakların nasıl büyüyeceğini tahmin etmesine olanak veren kapalı döngü bir sistem; böylece bakım, sorun ortaya çıkmadan önce planlanabilir.
Çelik kutuların içinde sürünen robotlar
Birçok uzun açıklıklı köprünün içinde, yol örtüsü ortotropik çelik döşemelerle taşınır—sık aralıklı nervürler ve diyaframlarla sertleştirilmiş ince çelik levhalar. Bu bağlantılardaki kaynak eklemleri, bir köprünün ömrü boyunca binlerce yorgunluk çatlağı geliştirmesiyle kötü şöhrete sahiptir. Bunların elle denetlenmesi yavaş, rahatsız edici ve ayrıntıların kaçırılmasına açıktır. Yazarlar, çelik yüzeylere yapışabilen manyetik tekerlekli, kompakt bir robot tasarladı ve kapalı kutu kirişlerin içinde gezinmesini sağladı. Küçük bir robotik kol yüksek çözünürlüklü bir kamerayı taşır; kaynak hatları boyunca tarama yaparken, yerleşik yazılım görüntülerdeki en ince çatlakları bile otomatik olarak vurgular. Laboratuvar testlerinde, robotun kiriş içindeki konumu birkaç santimetre hassasiyetle izlenebildi; bu da bir çatlağın hangi kaynağa ait olduğunu ve o kaynak boyunca nerede bulunduğunu tam olarak bilmek için yeterince doğruydu.
Köprünün yaşayan dijital ikizi
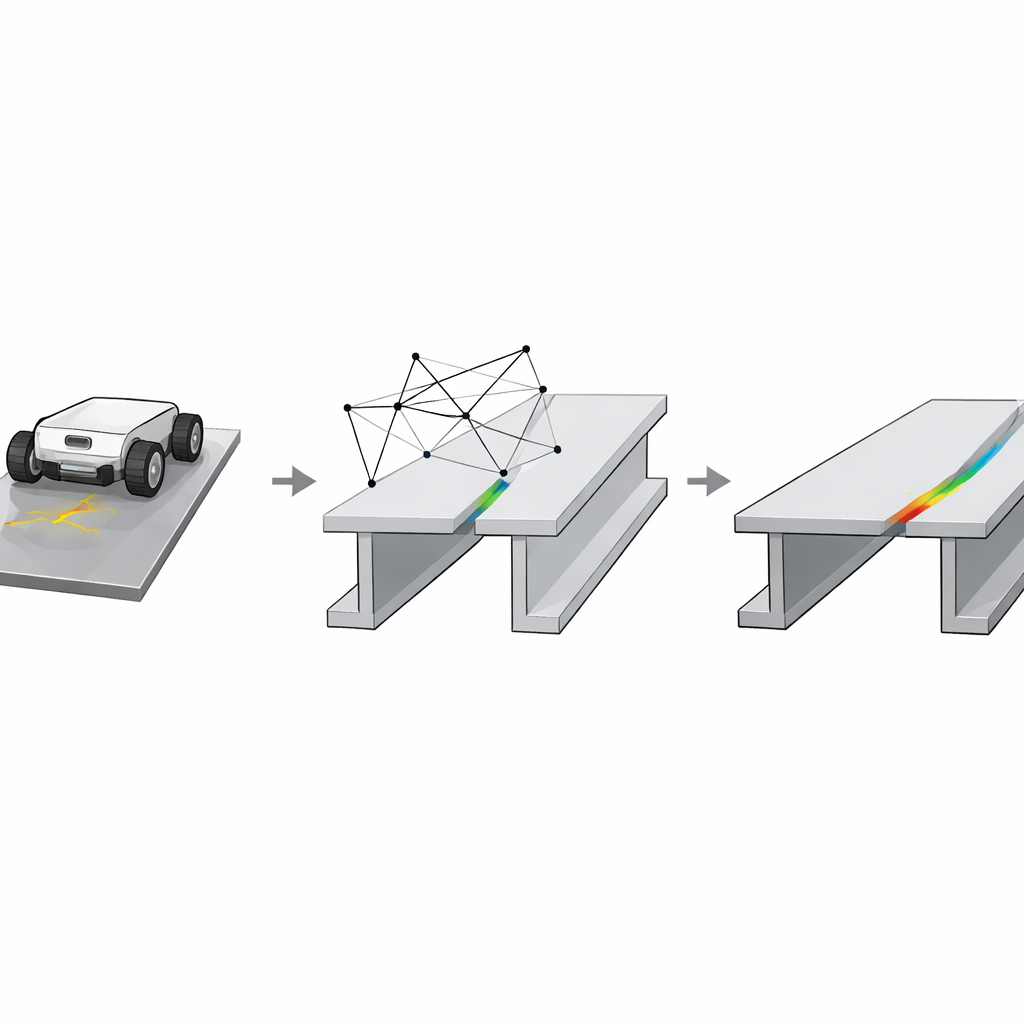
Çatlakları bulmak hikâyenin sadece bir parçası; onlar köprünün geleceği için ne anlama geliyor bilmek de en az bunun kadar önemlidir. Bunu yapmak için araştırmacılar robotun ölçümlerini köprünün ayrıntılı bilgisayar kopyası olan bir dijital ikiz ile ilişkilendirir. Tespit edilen her çatlak, kamera görüntüsünden temiz bir merkez hattına dönüştürülür ve ardından döşeme ve nervürlerin üç boyutlu modeline eşlenir. Her çatlağın çevresinde, model sanal ağını otomatik olarak iyileştirir ve trafik yüklerinin—ulusal tasarım standartlarına dayalı olarak—çatlak önündeki gerilimi nasıl yoğunlaştırdığını simüle eder. Yerleşik kırılma mekaniği yasaları uygulanarak, ikiz köprüyü sentezde “yaşlandırabilir”, tekrar eden kamyon geçişleri altında her çatlağın ne kadar ve ne hızla büyüyeceğini ve onarımın acil hale gelmesine kadar ne kadar yorgunluk ömrü kaldığını tahmin edebilir.
Gerçek çatlaklardan öğrenen bir döngü
Çerçeve tek taraflı tahminle sınırlı kalmaz. Bir hizmet döneminin ardından robot aynı kaynaklara tekrar gönderilebilir ve yeni çatlak şekilleri dijital ikizin tahminleriyle karşılaştırılabilir. Yazarlar, gözlemlenen ve tahmin edilen çatlak iskeletlerini nokta nokta karşılaştıran, hem ne kadar farklılaştıklarını hem de çatlağın yönünün ne kadar saptığını izleyen matematiksel ölçüler geliştirdiler. Bu farklılıklar daha sonra çatlak önündeki açılma ve kesme kuvvetlerinin altındaki karışım açısından yorumlanır. İkiz ile gerçek çatlak hattı yakından örtüştüğünde modele olan güven yüksektir. Özellikle kesmenin baskın olduğu bölgelerde sapma görüldüğünde sistem yüksek belirsizliği işaretler; bu da daha sık inceleme veya temkinli bakım planlamasının akıllıca olacağını gösterir.
Laboratuvar testlerinden gerçek bir köprüye
Ekip önce robotu gerçek bir köprünün kutu şeklindeki içini taklit eden bir laboratuvar segmentinde doğruladı. Testler güçlü manyetik yapışma, dikey ve yatay yüzeylerde pürüzsüz hareket ve milimetrenin altında çatlak görünürlüğüyle net kaynak görüntüleri gösterdi. Konumlandırma hataları çoğunlukla 2 santimetrenin altında kaldı; bu, kaynak hatları arasındaki aralığa rahatça sığdı. Daha sonra sistemi Çin’deki 15 yıllık bir asma köprünün içinde devreye aldılar. Geleneksel elle yapılan çalışmayla karşılaştırıldığında, robotik denetim bir kiriğer başına ortalama denetim süresini yaklaşık iki saatten bir saatin altına düşürdü. Görüntülerden ölçülen çatlak uzunlukları, örneklerin çoğunda manuel zemin gerçeğiyle yaklaşık yüzde on içinde eşleşti. Bu çatlaklar dijital ikize aktarıldığında, yüzey diyafram çatlakları sadece milimetre ölçeğinde sapma ile yeniden üretildi; daha karmaşık döşeme–nervür çatlakları ise kesme kuvvetlerinin etkisi arttıkça daha büyük farklılıklar gösterdi.
Günlük köprü güvenliği için bunun anlamı
Uzman olmayanlar için ana mesaj şudur: çalışma, köprülerin mühendislerine sadece nerede çatlak olduğunu söylemekle kalmayıp her çatlak için ne kadar endişelenilmesi gerektiğini ve bu endişenin zaman içinde nasıl evrileceğini “anlatmaya” başlayabileceğini gösteriyor. Robotik inceleme ile fizik tabanlı bir dijital ikizin birleşmesiyle, çerçeve aralıklı görsel kontrolleri veri açısından zengin, yinelenen bir döngüye çevirir: robotlar çatlak verisi toplar, ikiz gelecekteki büyümeyi projekte eder, incelemeler ve onarımlar buna göre planlanır ve bir sonraki ölçümler bu projeksiyonları değerlendirmek ve rafine etmek için geri beslenir. Farklı köprülerde daha fazla test gerekse de, bu yaklaşım daha güvenli, daha dayanıklı altyapı, yavaş elle yapılan incelemelere daha az bağımlılık ve bakımın gizli hasarın bir adım gerisinde değil bir adım önünde kalmasını vaat ediyor.
Atıf: Li, X., Fu, Z., Guo, H. et al. A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges. Commun Eng 5, 76 (2026). https://doi.org/10.1038/s44172-026-00637-0
Anahtar kelimeler: çelik köprü yorulması, robotik denetim, dijital ikiz, yapısal sağlık izleme, çatlak büyüme tahmini