Clear Sky Science · fr
Un cadre en boucle fermée intégrant l’inspection robotisée et le jumeau numérique pour le pronostic de fatigue des ponts en acier en service
Pourquoi il est important de maintenir les grands ponts en sécurité
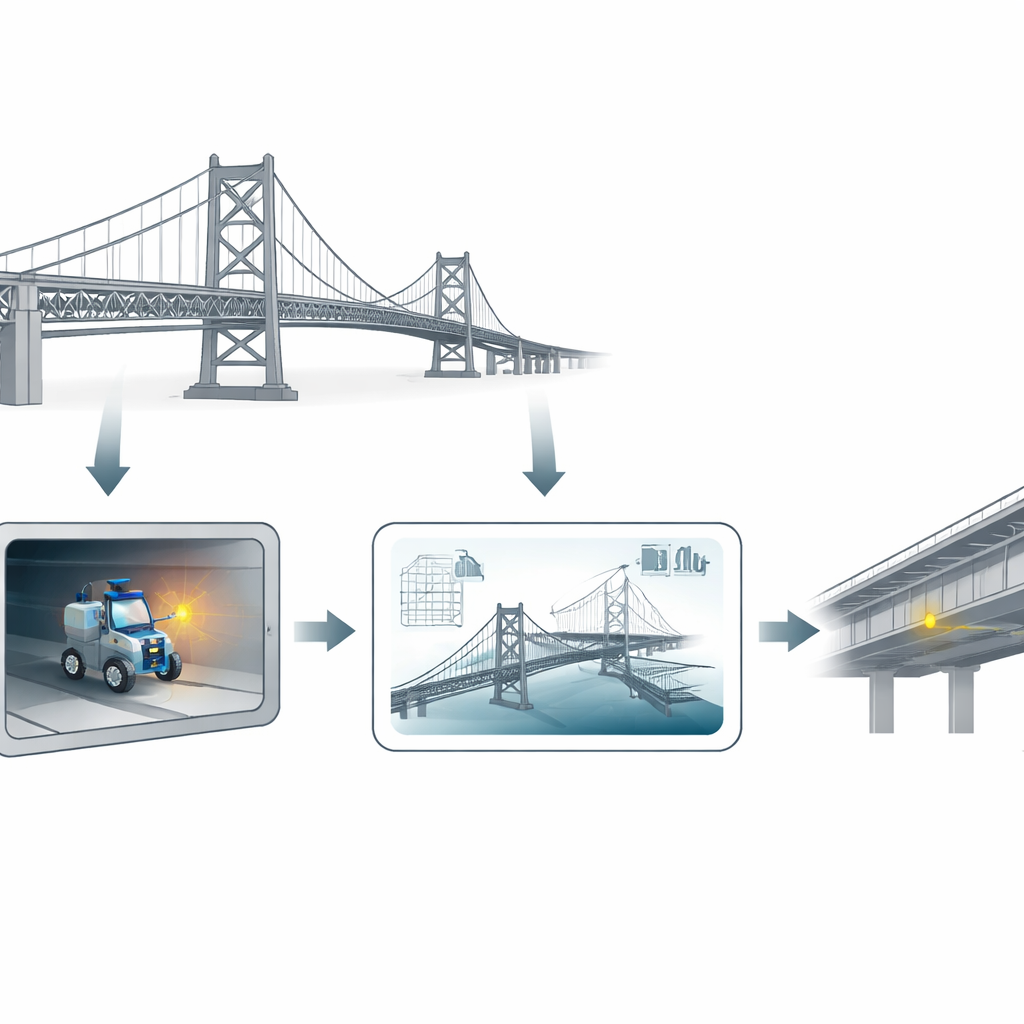
Les ponts en acier à grandes travées sont l’épine dorsale des transports modernes, supportant des milliers de véhicules chaque jour. Au fil des années de circulation, de petites fissures peuvent progressivement s’agrandir dans leurs tabliers en acier, menaçant finalement la sécurité et entraînant des réparations coûteuses ou des fermetures. Aujourd’hui, la plupart de ces fissures sont encore repérées par des personnes qui rampent dans des caissons d’acier exiguës avec des lampes de poche et des caméras. Cet article présente une nouvelle façon de surveiller le vieillissement des ponts en acier : un système en boucle fermée qui permet aux robots de détecter et mesurer les fissures, et à un « jumeau » virtuel du pont de prévoir comment ces fissures vont croître, afin de planifier la maintenance avant qu’un problème ne survienne.
Des robots qui rampent à l’intérieur des caissons en acier
À l’intérieur de nombreux ponts à grandes travées, la chaussée est portée par des tabliers orthotropes en acier — des plaques d’acier minces raidies par des nervures et des diaphragmes rapprochés. Les soudures à ces jonctions sont connues pour développer des milliers de fissures de fatigue au cours de la vie du pont. Les inspecter manuellement est lent, inconfortable et propice aux erreurs. Les auteurs ont conçu un robot compact aux roues magnétiques capable de s’agripper aux surfaces en acier et de se déplacer à l’intérieur des poutres-caisson fermées. Un petit bras robotique embarque une caméra haute résolution qui balaie le long des lignes de soudure tandis qu’un logiciel embarqué met automatiquement en évidence même les fissures capillaires dans les images. Lors d’essais en laboratoire, la position du robot à l’intérieur de la poutre pouvait être suivie à quelques centimètres près, suffisamment précise pour savoir exactement à quelle soudure appartenait une fissure et où elle se situait le long de cette soudure.
Un jumeau numérique vivant du pont
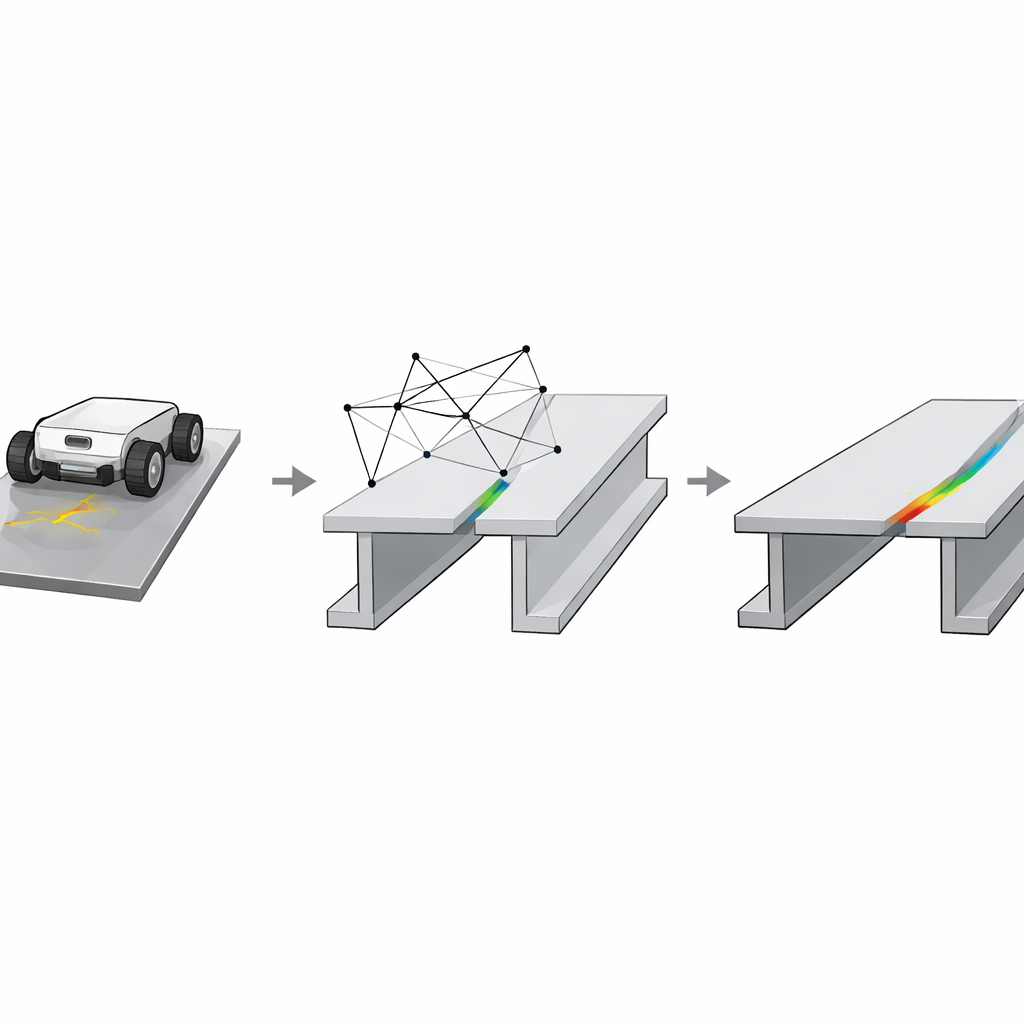
Détecter des fissures ne suffit pas ; il est tout aussi important de comprendre ce qu’elles signifient pour l’avenir du pont. Pour cela, les chercheurs relient les mesures du robot à une réplique informatique détaillée du pont, appelée jumeau numérique. Chaque fissure identifiée est convertie depuis l’image caméra en une ligne médiane propre, puis cartographiée dans un modèle tridimensionnel du tablier et des nervures. Autour de chaque fissure, le modèle affine automatiquement son maillage virtuel et simule comment les charges de circulation — basées sur les codes de conception nationaux — concentrent les contraintes à l’avant de la fissure. En appliquant des lois établies de mécanique de la fracture, le jumeau peut alors « vieillir » le pont in silico, en prédisant jusqu’où et à quelle vitesse chaque fissure est susceptible de croître sous les passages répétés de camions et combien de durée de vie en fatigue reste avant qu’une réparation ne devienne urgente.
Une boucle qui apprend des fissures réelles
Le cadre ne s’arrête pas à la prédiction unidirectionnelle. Après une période de service, le robot peut être renvoyé sur les mêmes soudures et les nouvelles formes de fissures comparées à ce que le jumeau numérique avait prévu. Les auteurs ont développé des métriques mathématiques qui comparent point par point les squelettes de fissure observés et prédits, suivant à la fois l’écart de position et la déviation de la direction de la fissure. Ces différences sont ensuite interprétées en termes du mélange sous-jacent de forces d’ouverture et de cisaillement à l’avant de la fissure. Là où le jumeau et la fissure réelle concordent étroitement, la confiance dans le modèle est élevée. Là où ils divergent — en particulier dans des zones dominées par le cisaillement — le système signale une incertitude accrue, indiquant qu’il est prudent d’augmenter la fréquence des inspections ou d’adopter une planification de maintenance plus conservatrice.
Des essais en laboratoire à un pont réel
L’équipe a d’abord validé le robot dans un segment de laboratoire reproduisant l’intérieur en forme de caisson d’un pont réel. Les essais ont montré une forte adhérence magnétique, un déplacement fluide sur surfaces verticales et horizontales, et des images de soudures nettes avec une visibilité des fissures sub‑millimétrique. Les erreurs de positionnement restaient majoritairement inférieures à 2 centimètres, largement dans l’espacement entre les lignes de soudure. Ils ont ensuite déployé le système à l’intérieur d’un pont à haubans de 15 ans en Chine. Par rapport aux méthodes manuelles conventionnelles, l’inspection robotisée a réduit le temps moyen d’inspection par âme de poutre d’environ deux heures à moins d’une heure. Les longueurs de fissure mesurées à partir des images correspondaient à la vérité terrain manuelle à environ dix pour cent pour la majorité des échantillons. Lorsque ces fissures ont été intégrées au jumeau numérique, les fissures des diaphragmes de surface ont été reproduites avec seulement un écart de l’ordre du millimètre, tandis que les fissures plus complexes entre tablier et nervure montraient des différences plus importantes, croissant avec l’influence des forces de cisaillement.
Ce que cela signifie pour la sécurité quotidienne des ponts
Pour le grand public, le message clé est que l’étude ouvre la voie à des ponts capables d’« informer » les ingénieurs non seulement de l’emplacement des fissures, mais aussi du degré d’inquiétude à accorder à chaque fissure et de l’évolution de cette préoccupation dans le temps. En mariant l’inspection robotisée à un jumeau numérique fondé sur la physique, le cadre transforme des contrôles visuels sporadiques en une boucle répétée et riche en données : les robots collectent les données sur les fissures, le jumeau projette leur croissance future, les inspections et réparations sont planifiées en conséquence, et la prochaine série de mesures alimente le système pour évaluer et affiner ces projections. Bien que des tests supplémentaires sur différents ponts soient nécessaires, cette approche promet des infrastructures plus sûres et plus résilientes, une réduction de la dépendance aux relevés manuels lents et une maintenance qui anticipe les dommages cachés plutôt que de toujours courir après eux.
Citation: Li, X., Fu, Z., Guo, H. et al. A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges. Commun Eng 5, 76 (2026). https://doi.org/10.1038/s44172-026-00637-0
Mots-clés: fatigue des ponts en acier, inspection robotique, jumeau numérique, surveillance de l’intégrité structurelle, prévision de la propagation des fissures