Clear Sky Science · pt
Uma estrutura em circuito fechado integrando inspeção robótica e gêmeos digitais para prognóstico de fadiga de pontes de aço em serviço
Por que manter grandes pontes seguras importa
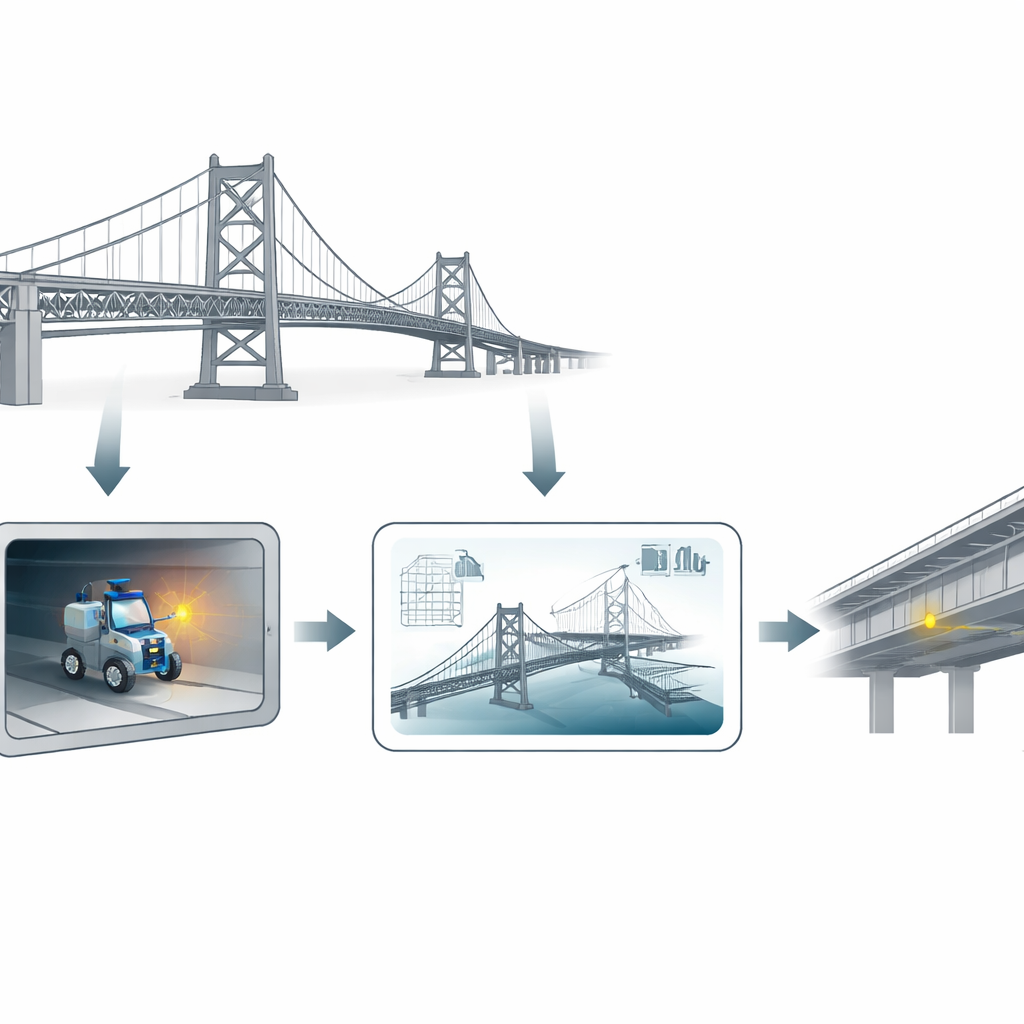
Pontes de aço de grande vão são a espinha dorsal do transporte moderno, suportando milhares de veículos todos os dias. Ao longo de anos de tráfego, pequenas fissuras podem crescer lentamente nas lajes de aço, acabando por ameaçar a segurança e forçar reparos caros ou interdições. Hoje, a maioria dessas trincas ainda é encontrada por pessoas que rastejam dentro de caixas de aço apertadas com lanternas e câmeras. Este artigo apresenta uma nova maneira de vigiar pontes de aço envelhecidas: um sistema em circuito fechado que permite a robôs localizar e medir trincas, e um “gêmeo” virtual da ponte prever como essas trincas irão crescer, para que a manutenção possa ser planejada antes que problemas ocorram.
Robôs que rastejam dentro de caixas de aço
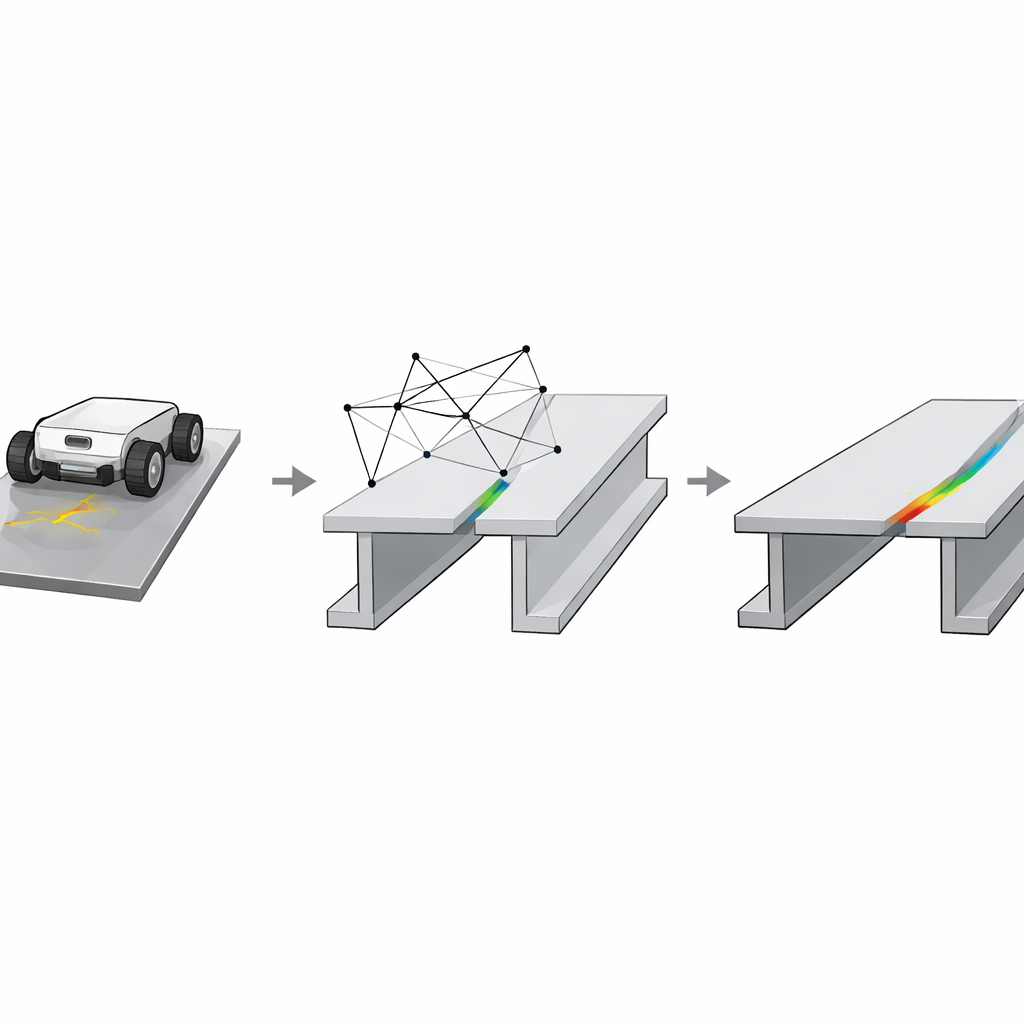
No interior de muitas pontes de grande vão, a via é suportada por lajes ortotrópicas de aço—placas finas reforçadas por nervuras e diafragmas espaçados de forma próxima. As uniões soldadas nessas conexões são notórias por desenvolverem milhares de trincas por fadiga ao longo da vida da ponte. Inspecioná-las manualmente é lento, desconfortável e propenso a perdas de detalhes. Os autores projetaram um robô compacto com rodas magnéticas que se prende a superfícies de aço e navega dentro das vigas-caixa fechadas. Um pequeno braço robótico carrega uma câmera de alta resolução, que varre ao longo das linhas de solda enquanto um software embarcado destaca automaticamente até mesmo trincas capilares nas imagens. Em testes de laboratório, a posição do robô dentro da viga pôde ser rastreada com precisão de poucos centímetros, suficiente para identificar exatamente a qual solda uma trinca pertence e onde ao longo dessa solda ela se localiza.
Um gêmeo digital vivo da ponte
Encontrar trincas é apenas parte da história; saber o que elas significam para o futuro da ponte é igualmente importante. Para isso, os pesquisadores vinculam as medições do robô a uma réplica computacional detalhada da ponte, conhecida como gêmeo digital. Cada trinca identificada é convertida da imagem da câmera em uma linha central limpa e então mapeada em um modelo tridimensional da laje e das nervuras. Ao redor de cada trinca, o modelo refina automaticamente sua malha virtual e simula como as cargas de tráfego—com base em normas nacionais de projeto—concentram esforços na frente da trinca. Aplicando leis estabelecidas da mecânica da fratura, o gêmeo então pode “envelhecer” a ponte in silico, prevendo até que ponto e com que velocidade cada trinca provavelmente crescerá sob passagens repetidas de caminhões e quanto de vida por fadiga resta antes que um reparo se torne urgente.
Um loop que aprende com trincas reais
A estrutura não se limita à previsão unidirecional. Após um período de serviço, o robô pode ser reenviado às mesmas soldas e os novos formatos das trincas comparados com o que o gêmeo digital havia previsto. Os autores desenvolveram medidas matemáticas que comparam os esqueletos das trincas observadas e previstas ponto a ponto, acompanhando tanto o quanto eles divergem quanto o quanto a direção da trinca se desviou. Essas diferenças são então interpretadas em termos da mistura subjacente de forças de abertura e cisalhamento na frente da trinca. Onde o gêmeo e a trinca real coincidem de forma estreita, a confiança no modelo é alta. Onde divergem—especialmente em zonas dominadas por cisalhamento—o sistema sinaliza maior incerteza, indicando que inspeções mais frequentes ou planejamento de manutenção conservador são recomendáveis.
Dos testes de laboratório a uma ponte real
A equipe primeiro validou o robô em um segmento de laboratório que imitava o interior em forma de caixa de uma ponte real. Os testes mostraram forte adesão magnética, movimento suave por superfícies verticais e horizontais, e imagens de solda nítidas com visibilidade de trincas submilimétricas. Erros de posicionamento permaneceram na maior parte abaixo de 2 centímetros, confortavelmente dentro do espaçamento entre linhas de solda. Em seguida, implantaram o sistema no interior de uma ponte estaiada de 15 anos na China. Em comparação com o trabalho manual convencional, a inspeção robótica reduziu o tempo médio de inspeção por viga de cerca de duas horas para menos de uma hora. Comprimentos de trinca medidos nas imagens coincidiram com a referência manual dentro de aproximadamente dez por cento para a maioria das amostras. Quando essas trincas foram alimentadas no gêmeo digital, trincas na superfície de diafragmas foram reproduzidas com desvio de apenas alguns milímetros, enquanto trincas mais complexas entre laje e nervura apresentaram diferenças maiores que cresceram com a influência de forças de cisalhamento.
O que isso significa para a segurança cotidiana das pontes
Para não especialistas, a mensagem principal é que o estudo aponta para pontes que podem “dizer” aos engenheiros não apenas onde estão fissuradas, mas o quanto se deve se preocupar com cada trinca e como essa preocupação evoluirá ao longo do tempo. Ao unir inspeção robótica com um gêmeo digital baseado em física, a estrutura transforma verificações visuais esporádicas em um ciclo repetitivo rico em dados: robôs coletam dados de trincas, o gêmeo projeta o crescimento futuro, inspeções e reparos são agendados conforme necessário, e a próxima rodada de medições retroalimenta para avaliar e refinar essas projeções. Embora sejam necessários mais testes em diferentes pontes, essa abordagem promete infraestrutura mais segura e resiliente, menor dependência de levantamentos manuais lentos e manutenção que se antecipa ao dano oculto em vez de ficar um passo atrás dele.
Citação: Li, X., Fu, Z., Guo, H. et al. A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges. Commun Eng 5, 76 (2026). https://doi.org/10.1038/s44172-026-00637-0
Palavras-chave: fadiga em pontes de aço, inspeção robótica, gêmeo digital, monitoramento da integridade estrutural, previsão de crescimento de trinca