Clear Sky Science · nl
Een gesloten-lus raamwerk dat robotinspectie en digitale tweelingen integreert voor vermoeidheidsprognoses van in gebruik zijnde staalbruggen
Waarom het veilig houden van grote bruggen ertoe doet
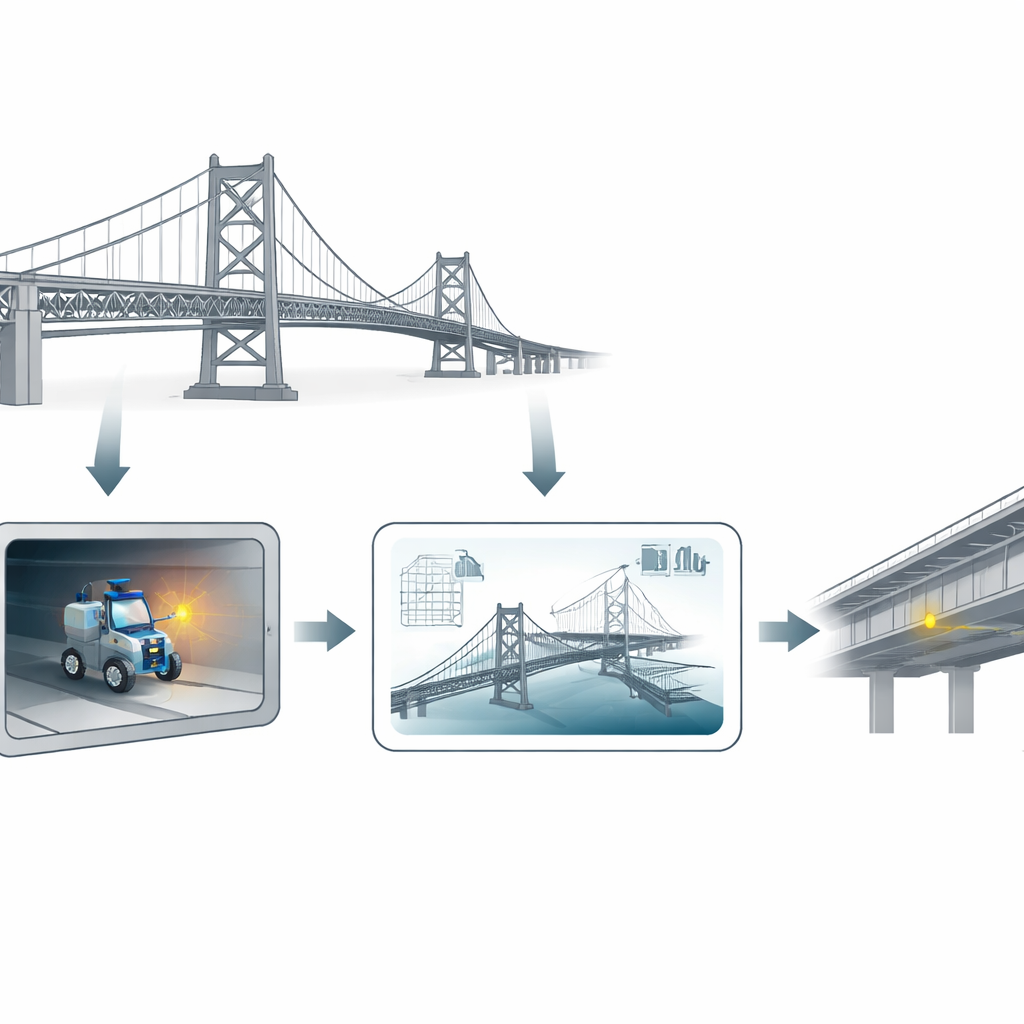
Langspannige staalbruggen vormen de ruggengraat van moderne mobiliteit en dragen dagelijks duizenden voertuigen. Door jarenlange verkeersbelasting kunnen microscheurtjes langzaam groeien in hun stalen dekplaten, uiteindelijk de veiligheid bedreigen en leiden tot kostbare reparaties of afsluitingen. Vandaag de dag worden de meeste van deze scheuren nog door mensen ontdekt die kruipend met zaklampen en camera’s door krappe stalen kokers gaan. Dit artikel presenteert een nieuwe manier om verouderende staalbruggen te bewaken: een gesloten-lus systeem waarbij robots scheuren opsporen en meten, en een virtuele ‘tweeling’ van de brug voorspelt hoe die scheuren zich zullen uitbreiden, zodat onderhoud gepland kan worden voordat problemen ontstaan.
Robots die in stalen kokers kruipen
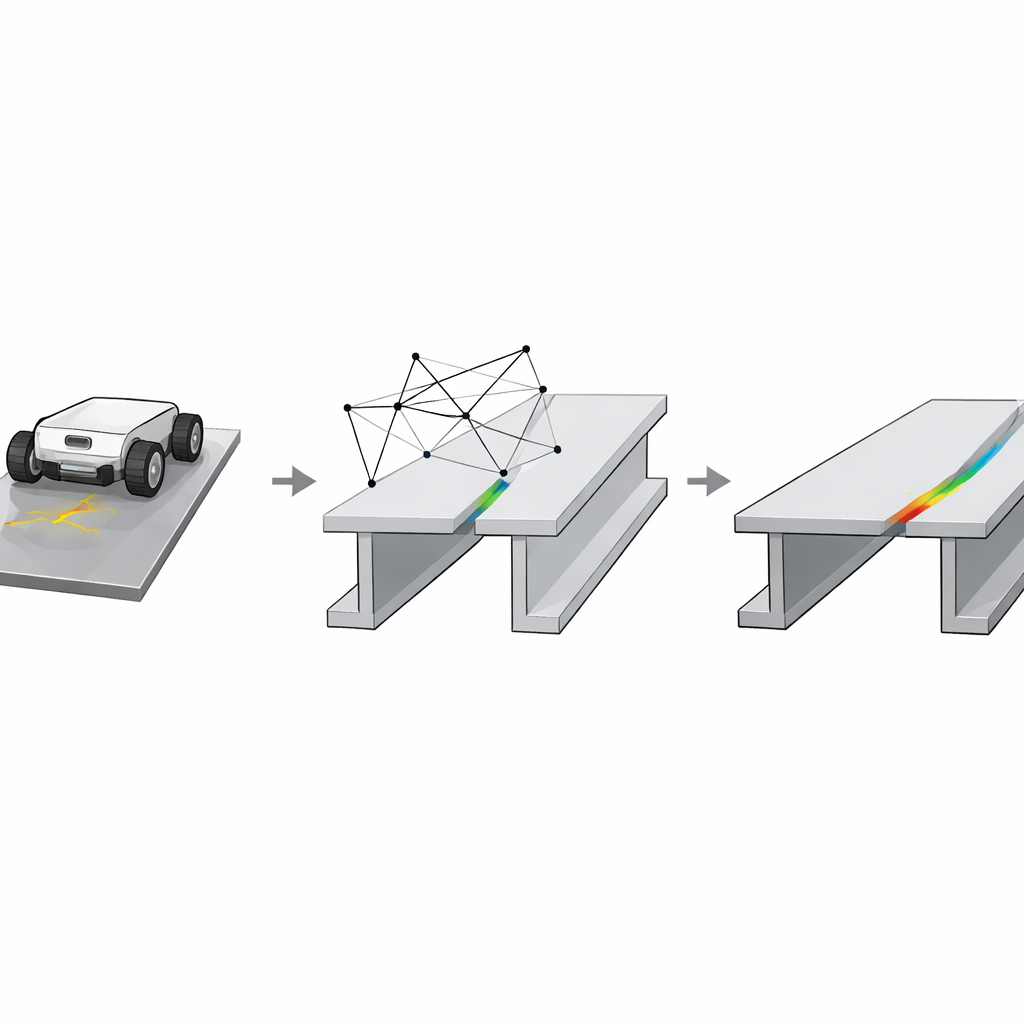
In veel langspannige bruggen wordt het rijdek ondersteund door orthotrope stalen dekken—dunne staalplaten verstevigd met dicht op elkaar geplaatste ribben en tussenschotten. De gelaste aansluitingen bij deze verbindingen staan erom bekend dat zich tijdens de levensduur van een brug duizenden vermoeidheidsscheuren kunnen ontwikkelen. Inspectie met de hand is traag, ongemakkelijk en kan details missen. De auteurs ontwierpen een compact robotje met magnetische wielen dat zich aan stalen oppervlakken kan vasthechten en zich binnen de gesloten kokerliggers kan verplaatsen. Een kleine robotarm draagt een hoge-resolutie camera die langs lasnaden scant terwijl boordsoftware zelfs haarlijnscheurtjes in de beelden automatisch markeert. In laboratoriumtests kon de positie van de robot in de ligger tot op enkele centimeters worden gevolgd, nauwkeurig genoeg om precies te weten bij welke las een scheur hoort en waar langs die las de scheur zich bevindt.
Een levende digitale tweeling van de brug
Het vinden van scheuren is maar een deel van het verhaal; begrijpen wat ze betekenen voor de toekomst van de brug is even belangrijk. Daartoe koppelen de onderzoekers de metingen van de robot aan een gedetailleerde computerkopie van de brug, bekend als een digitale tweeling. Elke geïdentificeerde scheur wordt uit een camerabeeld omgezet in een nette middenlijn en vervolgens in het driedimensionale model van het dek en de ribben gemapt. Rond elke scheur verfijnt het model automatisch zijn virtuele maas en simuleert hoe verkeersbelastingen—gebaseerd op nationale ontwerpnormen—spanningen concentreren aan de scheurvoorkant. Door gevestigde breukmechanica-wetten toe te passen, kan de tweeling de brug vervolgens in silico ‘ouder laten worden’, en voorspellen hoe ver en hoe snel elke scheur waarschijnlijk zal groeien onder herhaalde vrachtwagenpassages en hoeveel vermoeidheidslevensduur resteert voordat een reparatie urgent wordt.
Een lus die leert van echte scheuren
Het raamwerk stopt niet bij eenrichtingsvoorspelling. Na een periode in gebruik kan de robot teruggestuurd worden naar dezelfde lassen en kunnen de nieuwe scheurvormen vergeleken worden met wat de digitale tweeling had voorspeld. De auteurs ontwikkelden wiskundige maatstaven die de waargenomen en voorspelde scheurskeletten punt voor punt vergelijken, waarbij zowel wordt gevolgd hoe ver ze afwijken als hoeveel de scheurrichting is afgeweken. Deze verschillen worden vervolgens geïnterpreteerd in termen van de onderliggende mix van openscheurende en schuifkrachten bij de scheurvoorkant. Waar de tweeling en de echte scheurlijn goed overeenkomen, is het vertrouwen in het model hoog. Waar ze uiteenlopen—vooral in zones gedomineerd door schuif—geeft het systeem een hogere onzekerheid aan, wat aangeeft dat frequentere inspectie of voorzichtiger onderhoudsplanning verstandig is.
Van laboratoriumtests naar een echte brug
Het team valideerde de robot eerst in een laboratoriumsegment dat het kokerachtige interieur van een echte brug nabootste. Tests toonden sterke magnetische adhesie, soepele bewegingen over verticale en horizontale oppervlakken en heldere lasbeelden met submillimeter zichtbaarheid van scheuren. Positioneringsfouten bleven meestal onder de 2 centimeter, ruim binnen de afstand tussen laslijnen. Vervolgens zetten ze het systeem in binnen een 15 jaar oude tuibrug in China. Vergeleken met conventioneel handwerk verminderde de robotinspectie de gemiddelde inspectietijd per ligger van ongeveer twee uur tot minder dan een uur. Scheurlengtes gemeten uit de beelden kwamen grotendeels binnen ongeveer tien procent overeen met handmatige referentiemetingen. Wanneer deze scheuren in de digitale tweeling werden ingevoerd, werden oppervlakkige tussenschot-scheuren gereproduceerd met slechts millimeterniveau afwijking, terwijl complexere scheuren tussen dek en rib grotere verschillen lieten zien die toenamen met de invloed van schuifkrachten.
Wat dit betekent voor de dagelijkse veiligheid van bruggen
Voor niet-specialisten is de kernboodschap dat de studie wijst op bruggen die ingenieurs niet alleen kunnen vertellen waar ze gescheurd zijn, maar ook hoe zorgelijk elke scheur is en hoe die zorg in de loop van de tijd zal evolueren. Door robotinspectie te koppelen aan een op fysica gebaseerde digitale tweeling verandert het raamwerk sporadische visuele controles in een data-rijke, herhalende lus: robots verzamelen scheurgegevens, de tweeling projecteert toekomstige groei, inspecties en reparaties worden dienovereenkomstig gepland, en de volgende meetronde voedt de resultaten terug om die voorspellingen te beoordelen en te verfijnen. Hoewel meer tests op verschillende bruggen nodig zijn, belooft deze aanpak veiliger, veerkrachtiger infrastructuur, minder afhankelijkheid van trage handmatige onderzoeken en onderhoud dat een stap voorloopt op verborgen schade in plaats van er een stap achter te blijven.
Bronvermelding: Li, X., Fu, Z., Guo, H. et al. A closed-loop framework integrating robotic inspection and digital twins for fatigue prognosis of in-service steel bridges. Commun Eng 5, 76 (2026). https://doi.org/10.1038/s44172-026-00637-0
Trefwoorden: vermoeidheid staalbrug, robotinspectie, digitale tweeling, structurele gezondheidbewaking, voorspelling scheurgroei