Clear Sky Science · zh
预测性机器人“眼睛”如何影响视觉注意、表现与对工业协作机器人信任
为什么机器人“眼睛”在工作中很重要
在许多现代工厂中,人们现在与协作机器人(简称“CoBot”)共享工作站。这些机器被设计为与人并肩工作,递交零件或工具,而不是被关在安全围栏后的笼子里。但要让这种合作感觉既安全又高效,工人必须能够判断机器人下一步会做什么。本研究提出了一个简单却具有重大现实意义的问题:机器人的“眼睛”或简单箭头能否帮助人们迅速理解它的下一步动作?当这些视觉提示偶尔出错时,表现和信任会发生什么变化?
搭建共享机器人工作区
研究人员邀请志愿者来到实验室,与一台名为 Sawyer 的工业协作机器人手臂一起工作。参与者与机器人之间的桌面上有六个彩色方格,作为手臂可能移动的目标。参与者在面前的平板上看到相同的六种颜色,并需尽快且尽量准确地点击他们认为机器人下一步会触及的方格。在每次预测之后,他们还要在平板上完成一个简短的限时记忆与搜索任务。参与者预测越快,留给第二项任务的时间就越多,以此模拟真实工厂工作中的多任务需求。
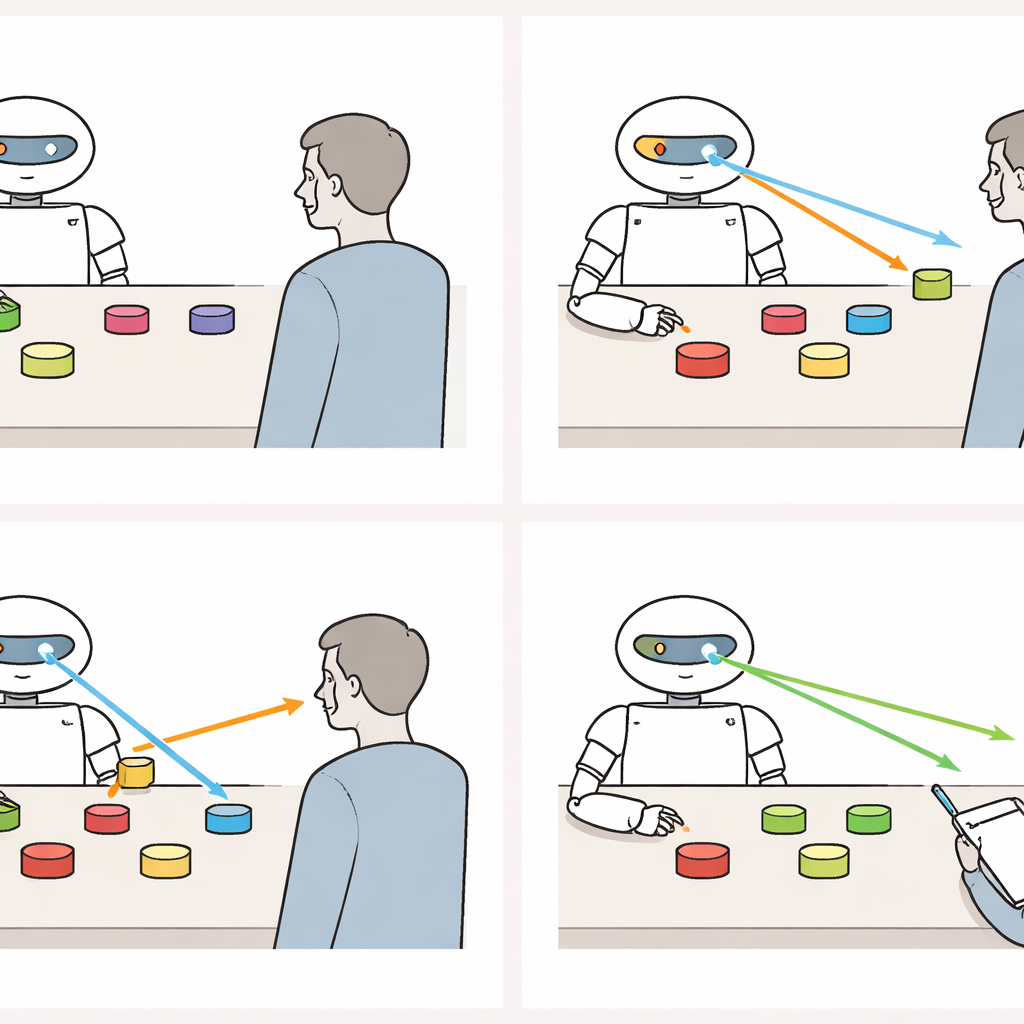
有“眼睛”、有箭头,或干脆没有提示
在两个独立但几乎相同的研究中,参与者被随机分配到三种机器人显示类型之一:屏幕上有抽象眼状图案的机器人、使用方向箭头的机器人,或屏幕为空白、无视觉提示的机器人。在提示条件下,眼睛或箭头会在手臂开始移动前一秒朝向正确的彩色方格并保持该方向。研究者明确告知参与者这些提示是预测性的,并在正式试验前通过演示阶段展示了若干示例。在试验的中间区块中,研究者在提示条件下秘密引入了两次“错误”事件——眼睛或箭头指向一格,但手臂却移动到另一格。参与者佩戴的眼动追踪眼镜记录了每次试验中他们注视的位置与时间。
引导注意力并加快决策
当机器人的提示可靠时,眼状显示明显占优。看到机器人“眼睛”的参与者比没有提示的人更快将视线转向正确目标,并且总体上比看到箭头的人更快。他们在平板上确认预测的时间也更早,有时比与无提示机器人合作的参与者提前近整整一秒。箭头也有帮助,但其效益较小且在两项研究中不够一致。重要的是,各条件下的准确率都保持在较高水平:使用提示使人们能更快做决定而不增加错误。眼动数据表明,提示条件下参与者确实注视了机器人显示屏,且注视次数更多的参与者往往更快预测机器人的动作,并在随后要求更高的记忆任务中表现更好。
当机器人误导你时会发生什么
一旦机器人违背了提示,情况就改变了。当眼睛或箭头指向一处而手臂移动到另一处时,参与者明显放慢了速度。在随后的试验中,他们注视目标所需的时间变长、做出预测所需的时间也更久,抹去了先前相对于无提示组的速度优势。他们的注视行为也发生了变化:人们减少了对机器人显示的注视,转而更长时间更仔细地盯着移动的机械臂,仿佛在反复核对其动作。尽管这种干扰存在,影响并非永久性的。在最后一组无错误试验中,注意力与预测速度部分恢复,且眼睛条件再次倾向于优于无提示条件,尽管不总是像错误发生前那样显著。
如何信任一个有用但会出错的伙伴
除了表现外,研究者在四个时间点测量了参与者对机器人的信任感:互动前、最初一段无误行为之后、提示出错后立即,以及最后一段无错区块之后。信任呈现出熟悉的波动:在顺畅可预测的互动中略有上升,在提示误导用户时急剧下降,随后在机器人再次可靠行为时回升。这种升降仅出现在带有预测性提示的条件,因为只有在这些条件下人们才会形成被违背的期待;无提示机器人的信任则相对稳定,因为它从未发出误导信号。有趣的是,工作负荷评分并未显示出明确模式,表明增加预测性“眼睛”或箭头并不一定让任务感觉更难或更轻松。
这对与机器人共事的人意味着什么
对普通读者而言,结论很直接:为工厂机器人配上富有表达性的“眼睛”或简单箭头,可以更容易地看清它下一步会做什么,帮助人们更快做出反应而不牺牲准确性。这些收益在喧闹繁忙、口头指令有限的工作环境中尤为重要。但研究也揭示了权衡:当机器人的视觉提示偶尔指错方向时,人们会放慢速度、转移视线并对系统失去信任——至少在一段时间内是如此。随着持续的可靠表现,表现和信任可以恢复。对未来人机协作工作站的设计者而言,信息是:预测性视觉提示是引导注意力与协调的强大工具,但其价值关键在于保持提示的可靠、清楚解释其含义,并为在罕见错误发生时的恢复做出规划。
引用: Naendrup-Poell, L., Onnasch, L. Predictive robot eyes shape visual attention, performance, and trust in interaction with an industrial CoBot. Sci Rep 16, 14171 (2026). https://doi.org/10.1038/s41598-026-50476-4
关键词: 人机协作, 视觉注意, 预测性提示, 对自动化的信任, 工业协作机器人