Clear Sky Science · tr
Endüstriyel Bir CoBot ile Etkileşimde Tahmine Dayalı Robot Gözleri Görsel Dikkati, Performansı ve Güveni Şekillendirir
Neden Robot Gözleri İş Yerinde Önemli?
Günümüzün birçok fabrikasında insanlar artık çalışma alanlarını işbirlikçi robotlar, yani “CoBot”larla paylaşıyor. Bu makineler insanlar yanında, güvenlik çitleri ardında kafeslerde durmak yerine parça veya alet vererek birlikte çalışmak üzere tasarlandı. Ancak bu ortaklığın güvenli ve verimli hissettirmesi için çalışanların robotun bir sonraki hareketini anlayabilmesi gerekir. Bu çalışma, büyük pratik sonuçları olan basit bir soruyu soruyor: bir robotun “gözleri” ya da basit okları, insanların bir sonraki hamleyi hızla anlayabilmesine yardımcı olabilir mi ve bu görsel ipuçları ara sıra yanlış çıktığında performans ve güven üzerinde ne olur?
Paylaşılan Bir Robot İş İstasyonunu Kurmak
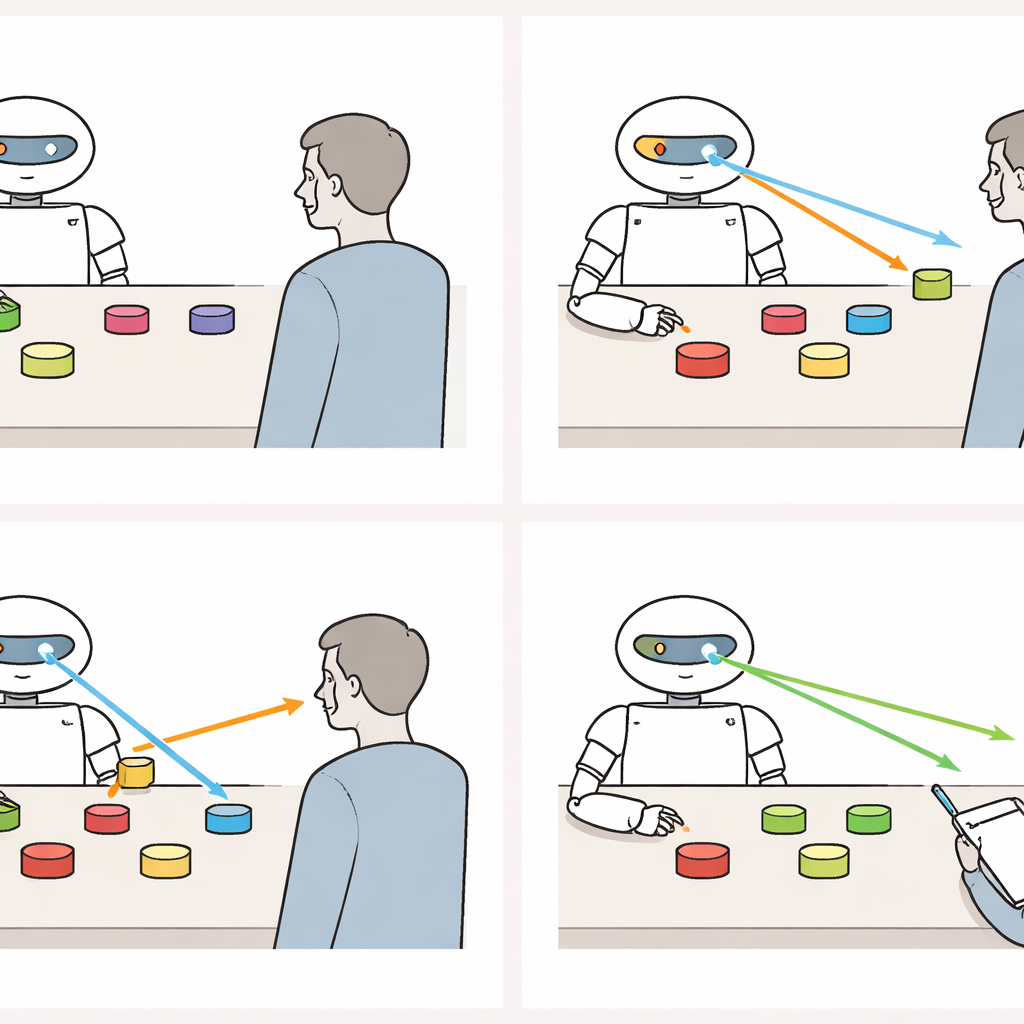
Araştırmacılar gönüllüleri Sawyer adlı bir endüstriyel işbirlikçi robot koluyla donatılmış bir laboratuvara getirdi. Kişi ile robot arasında, kolun hareket hedefi olabilecek altı renkli kareden oluşan bir masa vardı. Katılımcılar önlerindeki tablette aynı altı rengi gördü ve robotun bir sonraki hangi kareye ulaşacağını düşündüklerini, mümkün olan en hızlı ve doğru şekilde dokunarak belirtmek zorundaydı. Her tahminden hemen sonra tablette kısa, zaman sınırlı bir hafıza ve arama görevi tamamladılar. Robotun hareketini ne kadar hızlı tahmin ederlerse, bu ikinci görev için o kadar çok zaman kalıyordu; bu, gerçek fabrika işinin çoklu görev gereksinimlerini taklit ediyordu.
Robot Gözleri, Oklar veya Hiç İpucu Yok
İki ayrı ama neredeyse özdeş çalışmada, kişiler rastgele üç robot ekran tipinden biriyle etkileşime girecek şekilde atandı: ekranında soyut göz benzeri şekiller olan bir robot, yön gösteren oklar kullanan bir robot veya görsel ipucu sunmayan boş ekranlı bir robot. İpucu koşullarında, gözler veya oklar kol hareket etmeden bir saniye önce doğru renkli kareye döndü ve sonra o yönde sabit kaldı. Katılımcılara bu ipuçlarının tahmine dayalı olduğu açıkça söylendi ve gerçek denemeler başlamadan önce birkaç örnek gösteren bir gösterim aşaması yapıldı. Denemelerin orta bloğunda, araştırmacılar ipucu koşullarında gizlice iki “hata” olayı ekledi; gözler veya oklar bir kareyi işaret ederken kol farklı bir yere gitti. Her deneme sırasında katılımcıların nereye ve ne zaman baktığını kaydetmek için göz izleme gözlüğü kullanıldı.
Dikkati Yönlendirmek ve Kararları Hızlandırmak
Robotun ipuçları güvenilir olduğunda, göz benzeri ekran belirgin bir avantaja sahipti. Robot gözlerini gören katılımcılar, ipucu olmayanlara göre doğru hedefe bakışlarını daha hızlı kaydırdı ve genellikle okları görenlerden de daha hızlıydı. Ayrıca tabletteki tahminlerini daha erken onayladılar; bazen ipucuz robota göre neredeyse bir saniye daha erken. Oklar da yardımcı oldu, ancak faydaları daha küçük ve iki çalışma arasında daha az tutarlıydı. Önemli olarak, tüm koşullarda doğruluk yüksekti: ipuçlarını kullanmak insanlara daha hızlı karar verme olanağı sağladı fakat daha fazla hata yapmalarına neden olmadı. Göz izleme verileri, ipucu koşullarında katılımcıların gerçekten robotun ekranına baktığını gösterdi ve ekrana daha çok bakanlar genellikle robotun hamlelerini daha hızlı tahmin edip ardından gelen zorlayıcı hafıza görevinde daha iyi performans gösterdi.
Robot Size Yanıltıcı İpucu Verdiğinde Ne Olur?
Robot vaadini bozduğu anda tablo değişti. Gözler veya oklar bir yöne işaret edip kol başka yere gittiğinde, katılımcılar yavaşladı. Daha sonraki denemelerde hedefe gözlerini sabitlemeleri ve tahmin yapmaları daha uzun sürdü; bu da önceki hız avantajını ipucu olmayan grup karşısında ortadan kaldırdı. Bakış davranışları da değişti: insanlar robotun ekranına bakmayı azalttı ve bunun yerine hareket eden robot kolunu daha yakın ve daha uzun süre izlemeye başladı; sanki hareketini iki kez kontrol ediyorlardı. Bu bozulmaya rağmen, zarar kalıcı olmadı. Hata içermeyen son deneme bloğunda dikkat ve tahmin hızı kısmen toparlandı ve göz koşulu tekrar genellikle ipucuz olmayan koşulu geride bıraktı, ancak hatalardan önceki kadar güçlü olmayabiliyordu.
Yardımcı Ama Hatalı Bir Ortakla Güven
Performansın yanı sıra araştırmacılar, insanların robota ne kadar güvendiklerini dört noktada ölçtü: herhangi bir etkileşimden önce, kusursuz davranışın ilk bölümünden sonra, ipucu hatalarının hemen ardından ve son hata içermeyen bloktan sonra. Güven tanıdık bir dalgalanma izledi. Akıcı, öngörülebilir etkileşimle biraz yükseldi, ipuçları kullanıcıyı yanıltınca keskin bir düşüş yaşadı ve robot tekrar güvenilir davrandığında yeniden arttı. Bu yükseliş ve düşüşler sadece insanların beklentilerinin ihlal edilebildiği tahmine dayalı ipucu koşullarında görüldü; ipucuz robota olan güven görece sabit kaldı çünkü o robot hiçbir zaman yanıltıcı sinyal vermedi. İlginç olarak, iş yükü değerlendirmeleri belirgin bir model göstermedi; bu da tahmine dayalı gözlerin veya okların eklenmesinin görevi güvenilir şekilde daha zor ya da daha kolay hissettirmediğini gösteriyor.
Robotlarla Çalışan İnsanlar İçin Anlamı
Bir gözlemci için çıkarım açık: fabrikaya bir robotun ifadeli “gözler”ini veya basit oklarını vermek, robotun bir sonraki hareketinin ne olacağını görmeyi çok daha kolay hâle getirebilir, insanların daha hızlı tepki vermesine yardımcı olabilir ve doğruluktan ödün vermez. Bu kazanımlar sözlü talimatların sınırlı olduğu yoğun, gürültülü çalışma ortamlarında önem taşır. Ancak çalışma aynı zamanda bir takas olduğunu gösteriyor. Robotun görsel ipuçları ara sıra yanlış yöne işaret ettiğinde insanlar yavaşlar, ekrandan uzaklaşır ve sisteme olan güvenleri—en azından bir süreliğine—azalır. Sürekli güvenilir davranışla performans ve güven yeniden toparlanabilir. Geleceğin insan-robot iş istasyonlarını tasarlayanlar için mesaj şudur: tahmine dayalı görsel ipuçları dikkat ve koordinasyon için güçlü araçlardır, ancak değerleri bunların güvenilirliğine bağlıdır; anlamları açıkça anlatılmalı ve nadir hatalar kaçınılmaz olduğunda bunlardan nasıl geri dönüleceği planlanmalıdır.
Atıf: Naendrup-Poell, L., Onnasch, L. Predictive robot eyes shape visual attention, performance, and trust in interaction with an industrial CoBot. Sci Rep 16, 14171 (2026). https://doi.org/10.1038/s41598-026-50476-4
Anahtar kelimeler: insan-robot işbirliği, görsel dikkat, tahmine dayalı ipuçları, otomasyona güven, endüstriyel cobotlar