Clear Sky Science · sv
Prediktiva robotögon formar visuell uppmärksamhet, prestation och förtroende i interaktion med en industriell CoBot
Varför robotögon spelar roll på arbetsplatsen
I många moderna fabriker delar människor numera arbetsstationer med kollaborativa robotar, eller ”CoBots”. Dessa maskiner är utformade för att arbeta sida vid sida med människor och lämna över delar eller verktyg i stället för att stå inhägnade bakom säkerhetsstaket. Men för att detta partnerskap ska kännas tryggt och effektivt måste arbetare kunna avgöra vad roboten kommer att göra härnäst. Denna studie ställer en enkel fråga med stora praktiska konsekvenser: kan en robots ”ögon” eller enkla pilar hjälpa människor att snabbt förstå dess nästa rörelse, och vad händer med prestation och förtroende när dessa visuella ledtrådar ibland visar sig vara fel?
Att ordna en gemensam robotarbetsplats
Forskarlaget tog in frivilliga till ett laboratorium med en industriell kollaborativ robotarm kallad Sawyer. Mellan personen och roboten stod ett bord med sex färgade rutor som tjänade som möjliga rörelsemål för armen. På en surfplatta framför deltagarna såg de samma sex färger och skulle trycka på rutan de trodde att roboten skulle nå efter härnäst, så snabbt och korrekt som möjligt. Direkt efter varje gissning genomförde de en kort, tidsbegränsad minnes- och sökuppgift på surfplattan. Ju snabbare de gissade robotens rörelse, desto mer tid återstod för den andra uppgiften, vilket efterliknar multitasking-kraven i verkliga fabriksarbete.
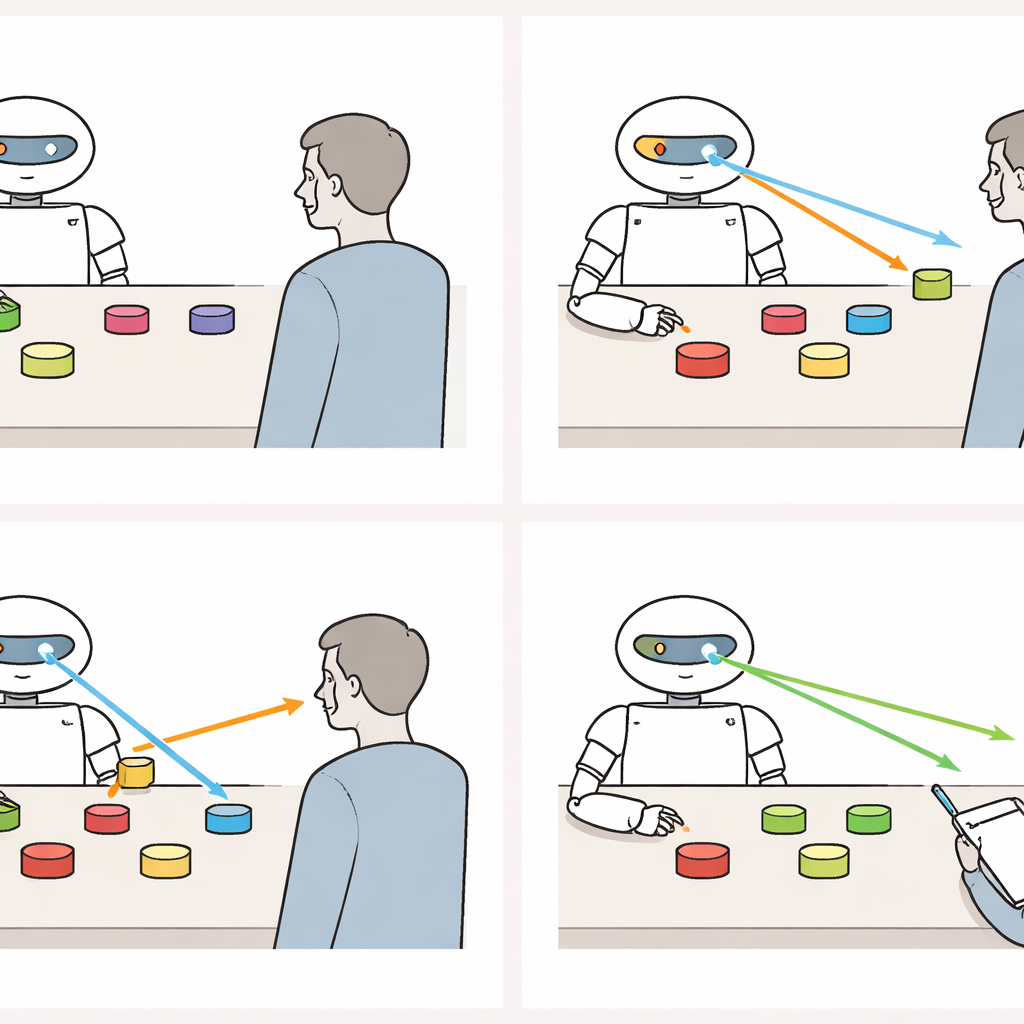
Robotögon, pilar eller inga ledtrådar alls
I två separata men nästan identiska studier lottades deltagarna till att interagera med en av tre robotvisningar: en robot med abstrakta ögonliknande former på sin skärm, en robot som använde riktade pilar, eller en robot med en tom skärm utan visuella ledtrådar. I ledtrådsförhållandena vände ögonen eller pilarna sig mot den korrekta färgrutan en sekund innan armen började röra sig och höll sedan den riktningen. Deltagarna informerades tydligt om att dessa signaler var prediktiva, och en demonstrationsfas visade flera exempel innan de riktiga försöken började. I mittenblocket av försök införde forskarna i hemlighet två ”fel”-händelser i ledtrådsförhållandena, där ögon eller pilar pekade mot en ruta men armen rörde sig mot en annan. Ögonspårningsglasögon registrerade var och när deltagarna tittade under varje försök.
Vägleda uppmärksamhet och påskynda beslut
När robotens signaler var tillförlitliga uppvisade den ögonliknande visningen en tydlig fördel. Deltagare som såg robotögon förflyttade sin blick till rätt mål snabbare än de som inte hade några ledtrådar, och generellt snabbare än de som såg pilar. De bekräftade också sina gissningar på surfplattan tidigare, ibland nästan en hel sekund tidigare än personer som arbetade med en robot utan ledtrådar. Pilar hjälpte också, men deras fördelar var mindre och mindre konsekventa över de två studierna. Viktigt är att noggrannheten höll sig hög i alla förhållanden: att använda ledtrådarna gjorde att folk kunde besluta snabbare utan att göra fler misstag. Ögonspårningsdata visade att deltagarna faktiskt tittade på robotens skärm i ledtrådsförhållandena, och de som tittade på den oftare tenderade att förutsäga robotens rörelser snabbare och prestera bättre på den krävande minnesuppgift som följde.
Vad händer när roboten vilseleder dig
Bilden förändrades så snart roboten bröt sitt löfte. När ögonen eller pilarna pekade åt ett håll och armen gick någon annanstans saktade deltagarna ner. I senare försök tog det längre tid för dem att fixera målet med blicken och längre tid att göra sina gissningar, vilket utplånade den tidigare snabbhetsfördelen jämfört med gruppen utan ledtrådar. Deras blickbeteende skiftade också: folk minskade hur mycket de tittade på robotens skärm och följde i stället den rörliga robotarmen mer noggrant och längre, som om de dubbelkollade dess handlingar. Trots denna störning var skadan inte permanent. I det sista blocket med felfria försök återhämtade sig uppmärksamhet och gissningshastighet delvis, och ögonvillkoret tenderade återigen att prestera bättre än ingen-ledtråd-villkoret, om än inte alltid lika starkt som före felen.
Att lita på en hjälpsam men felbar partner
Parallellt med prestationen mätte forskarna hur mycket deltagarna uppgav att de litade på roboten vid fyra tidpunkter: innan någon interaktion, efter en inledande period av felfritt beteende, omedelbart efter ledtrådsfelen och efter ett slutligt felfritt block. Förtroendet följde en välkänd våg. Det steg något vid smidig, förutsägbar interaktion, sjönk kraftigt när ledtrådarna missledde användaren, och steg sedan igen när roboten åter uppträdde pålitligt. Dessa upp- och nedgångar syntes bara i förhållandena med prediktiva ledtrådar, där människor faktiskt hade förväntningar att bli kränkta; förtroendet för roboten utan ledtrådar förblev relativt stabilt eftersom den aldrig gav missvisande signaler. Intressant nog visade arbetsbelastningsbetygen inget tydligt mönster, vilket tyder på att tillägget av prediktiva ögon eller pilar inte konsekvent gjorde uppgiften svårare eller enklare.
Vad detta betyder för människor som arbetar med robotar
För en lekmannabetraktare är slutsatsen enkel: att ge en fabriksrobot uttrycksfulla ”ögon” eller enkla pilar kan göra det mycket lättare att se vad den kommer att göra härnäst, vilket hjälper människor att reagera snabbare utan att offra noggrannhet. Dessa vinster är viktiga i hektiska, bullriga arbetsmiljöer där talade instruktioner är begränsade. Men studien visar också en avvägning. När robotens visuella ledtrådar ibland pekar felaktigt saktar människor ner, tittar bort från skärmen och litar mindre på systemet — åtminstone under en tid. Vid fortsatt pålitligt beteende kan både prestation och förtroende återhämta sig. För de som designar framtida människa-robot-arbetsstationer är budskapet att prediktiva visuella signaler är kraftfulla verktyg för uppmärksamhet och samordning, men deras värde beror avgörande på att de hålls ärliga, att deras innebörd förklaras tydligt och att man planerar för hur man återhämtar sig när sällsynta misstag oundvikligen inträffar.
Citering: Naendrup-Poell, L., Onnasch, L. Predictive robot eyes shape visual attention, performance, and trust in interaction with an industrial CoBot. Sci Rep 16, 14171 (2026). https://doi.org/10.1038/s41598-026-50476-4
Nyckelord: människa-robot-samarbete, visuell uppmärksamhet, prediktiva signaler, förtroende för automation, industriella cobotar