Clear Sky Science · ar
هل تشكّل عيون الروبوت التنبؤية الانتباه البصري والأداء والثقة في التفاعل مع روبوت تعاوني صناعي
لماذا تهم عيون الروبوت في مكان العمل
في العديد من المصانع الحديثة، يتشارك الناس الآن محطات عملهم مع روبوتات تعاونية تُعرف بـ«كوربوتات» (CoBots). صُممت هذه الآلات لتعمل جنبًا إلى جنب مع البشر، تسلّم أجزاء أو أدوات بدلاً من الجلوس داخل أقفاص خلف حواجز السلامة. لكن لكي يشعر العاملون بالأمان والكفاءة، يجب أن يكونوا قادرين على استبصار ما سيفعله الروبوت بعد ذلك. تطرح هذه الدراسة سؤالًا بسيطًا له عواقب عملية كبيرة: هل يمكن أن تساعد «عيون» الروبوت أو أسهم بسيطة الناس على فهم حركته التالية بسرعة، وماذا يحدث للأداء والثقة عندما تكون تلك الإشارات البصرية خاطئة أحيانًا؟
إعداد مساحة عمل مشتركة مع الروبوت
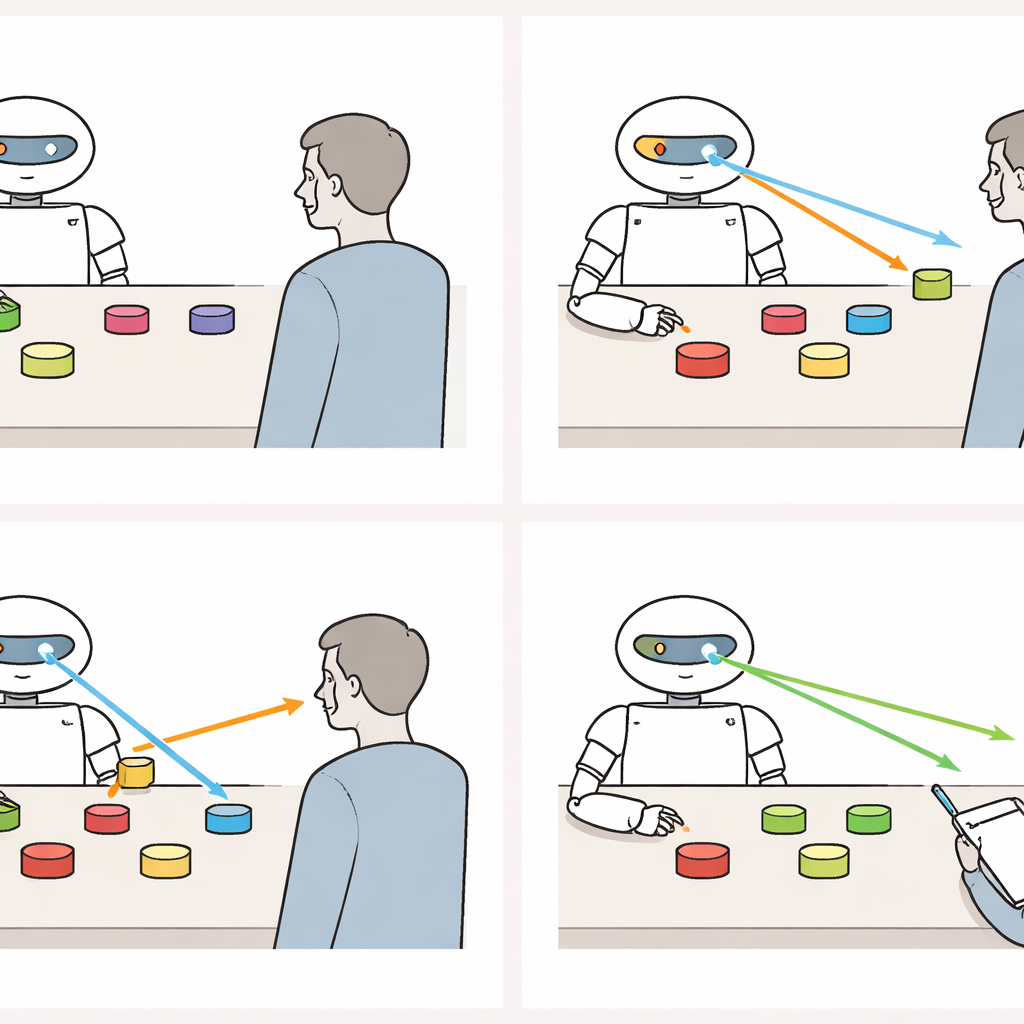
أحضر الباحثون متطوعين إلى مختبر مزوَّد بذراع روبوت صناعي تعاوني يُدعى Sawyer. بين الشخص والروبوت وُضع طاولة تحوي ست مربعات ملونة كانت أهدافًا محتملة لحركة الذراع. على جهاز لوحي أمامهم، رأى المشاركون نفس الألوان الستة واضطروا للنقر على المربع الذي يعتقدون أن الذراع ستمتد إليه بعد ذلك، بأقصى سرعة ودقة ممكنتين. مباشرة بعد كل توقُّع، أكملوا مهمة قصيرة زمنية للذاكرة والبحث على الجهاز اللوحي. كلما خمنوا حركة الروبوت أسرع، كلما تبقّى لديهم وقت أكبر للمهمة الثانية، محاكاةً لمتطلبات تعدد المهام في العمل المصنعي الحقيقي.
عيون روبوت، أسهم، أم لا إشارات على الإطلاق
خلال دراستين منفصلتين لكن شبه متطابقتين، تم تعيين الأشخاص عشوائيًا للتفاعل مع أحد ثلاثة أنواع من شاشات الروبوت: روبوت بشكال عيون مجردة على شاشته، روبوت يستخدم أسهمًا اتجاهية، أو روبوت بشاشة فارغة لا يقدم أي تلميحات بصرية. في شروط الإشارة، كانت العيون أو الأسهم تتحول نحو المربع الملون الصحيح قبل ثانية واحدة من بدء حركة الذراع ثم تبقى موجهة في هذا الاتجاه. طُلِب من المشاركين صراحةً أن هذه الإشارات تنبؤية، وعرضت مرحلة توضيحية عدة أمثلة قبل بدء التجارب الحقيقية. في الكتلة الوسطى من التجارب، أدخل الباحثون سرًا حدثيْن "خطاء" في شروط الإشارة، حيث أشارت العيون أو الأسهم إلى مربع واحد لكن الذراع تحركت إلى مربع مختلف. سجّلت نظارات تتبّع العين مكان وزمان نظرات المشاركين خلال كل تجربة.
توجيه الانتباه وتسريع القرارات
عندما كانت إشارات الروبوت موثوقة، كان لعرض العيون ميزة واضحة. المشاركون الذين رأوا عيون الروبوت حولوا نظرهم إلى الهدف الصحيح أسرع من أولئك الذين لم يتلقوا أي إشارات، وبشكل عام أسرع من الذين رأوا أسهمًا. كما أكدوا توقعاتهم على الجهاز اللوحي في وقت أبكر، أحيانًا بنحو ثانية كاملة مقارنةً بمن عملوا مع روبوت بلا إشارات. ساعدت الأسهم أيضًا، لكن فوائدها كانت أصغر وأقل اتساقًا عبر الدراستين. ومن المهم أن الدقة ظلت مرتفعة في جميع الشروط: استخدام الإشارات سمح للناس باتخاذ قرارات أسرع دون ارتكاب أخطاء أكثر. أظهرت بيانات تتبّع العين أن المشاركين كانوا بالفعل ينظرون إلى شاشة الروبوت في شروط الإشارة، وأن الذين نظروا إليها أكثر ميّلوا إلى التنبؤ بحركات الروبوت بسرعة أكبر وأداء أفضل في مهمة الذاكرة الصارمة التي تلتها.
ماذا يحدث عندما يضللك الروبوت
تغيّر المشهد بمجرد أن خرقت الروبوت وعده. عندما أشارت العيون أو الأسهم في اتجاه واحد وتحركت الذراع إلى مكان آخر، بطأ المشاركون. في التجارب اللاحقة، استغرقوا وقتًا أطول لتركيز نظرهم على الهدف ولإصدار توقعاتهم، مما محا الميزة الزمنية السابقة مقابل مجموعة بلا إشارات. تغيّر سلوك النظرة أيضًا: قلَّل الناس من مقدار نظراتهم إلى شاشة الروبوت وبدلاً من ذلك راقبوا ذراع الروبوت المتحركة عن كثب ولوقت أطول، كما لو كانوا يتحققون من أفعاله مرتين. وعلى الرغم من هذا الاضطراب، لم تكن الأضرار دائمة. في الكتلة النهائية من التجارب الخالية من الأخطاء، تعافى الانتباه وسرعة التنبؤ جزئيًا، وكانت حالة العيون تميل مجددًا إلى التفوق على حالة عدم وجود إشارات، وإن لم تكن دائمًا بنفس القوة التي سبقت الأخطاء.
الثقة في شريك مفيد لكنه قابل للخطأ
إلى جانب الأداء، قاس الباحثون مقدار الثقة التي أفاد بها المشاركون في الروبوت في أربع نقاط زمنية: قبل أي تفاعل، بعد فترة أولية من السلوك الخالي من الأخطاء، فورًا بعد أخطاء الإشارة، وبعد كتلة نهائية خالية من الأخطاء. اتخذت الثقة منحنى مألوفًا. ارتفعت إلى حد ما مع التفاعل السلس والقابل للتنبؤ، ثم هبطت بشكل حاد عندما خدعت الإشارات المستخدم، ثم صعدت مرة أخرى عندما تصرّف الروبوت بشكل موثوق. ظهرت هذه الزيادات والانخفضات فقط في الشروط المزودة بإشارات تنبؤية، حيث كان لدى الناس توقعات يمكن انتهاكها؛ أما الثقة في روبوت بدون إشارات فظلت مستقرة نسبياً لأن ذلك الروبوت لم يوفر إشارات مضلِّلة أبدًا. ومن المثير للاهتمام أن تقييمات عبء العمل لم تُظهر نمطًا واضحًا، مما يشير إلى أن إضافة عيون أو أسهم تنبؤية لم تجعل المهمة تبدو أصعب أو أسهل بشكل موثوق.
ماذا يعني هذا للأشخاص العاملين مع الروبوتات
للمراقب العادي، الخلاصة واضحة: إعطاء روبوت مصنعي "عيون" معبِّرة أو أسهم بسيطة يمكن أن يجعل من الأسهل بكثير رؤية ما سيفعله بعد ذلك، مما يساعد الناس على الاستجابة بسرعة أكبر دون التضحية بالدقة. هذه المكاسب مهمة في أماكن العمل المزدحمة والمزعجة حيث تكون التعليمات الصوتية محدودة. لكن الدراسة تُظهر أيضًا مفاضلة. عندما تشير تلميحات الروبوت البصرية أحيانًا إلى الاتجاه الخطأ، يتباطأ الناس، ويبتعدون عن الشاشة، وتضعف ثقتهم في النظام—على الأقل لفترة مؤقتة. مع استمرار السلوك الموثوق، يمكن أن يتعافى الأداء والثقة. للمهندسين الذين يصممون محطات عمل إنسان-روبوت في المستقبل، الرسالة هي أن الإشارات البصرية التنبؤية أدوات قوية للانتباه والتنسيق، لكن قيمتها تعتمد بشكل حاسم على الحفاظ على مصداقيتها، وشرح معناها بوضوح، والتخطيط لكيفية التعافي عندما تحدث أخطاء نادرة لا مفر منها.
الاستشهاد: Naendrup-Poell, L., Onnasch, L. Predictive robot eyes shape visual attention, performance, and trust in interaction with an industrial CoBot. Sci Rep 16, 14171 (2026). https://doi.org/10.1038/s41598-026-50476-4
الكلمات المفتاحية: التعاون بين الإنسان والروبوت, الانتباه البصري, الإشارات التنبؤية, الثقة في الأتمتة, الروبوتات التعاونية الصناعية