Clear Sky Science · pl
Przewidujące „oczy” robota kształtują uwagę wzrokową, wydajność i zaufanie w interakcji z przemysłowym CoBotem
Dlaczego oczy robota mają znaczenie w pracy
W wielu nowoczesnych fabrykach ludzie dzielą już stanowiska pracy z robotami współpracującymi, zwanymi „CoBotami”. Te maszyny zaprojektowano do pracy ramię w ramię z człowiekiem, przekazując części lub narzędzia zamiast pozostawać za osłonami bezpieczeństwa. Aby jednak taka współpraca była postrzegana jako bezpieczna i efektywna, pracownicy muszą rozumieć, co robot zrobi dalej. Badanie stawia proste pytanie o dalekosiężnych praktycznych konsekwencjach: czy „oczy” robota albo proste strzałki pomagają ludziom szybko odczytać jego następny ruch, i co dzieje się z wydajnością oraz zaufaniem, gdy te wskazówki okazują się czasami błędne?
Ustawienie wspólnego stanowiska roboczego
Naukowcy zaprosili ochotników do laboratorium z przemysłowym ramieniem współpracującym o nazwie Sawyer. Pomiędzy osobą a robotem ustawiono stół z sześcioma kolorowymi polami, które służyły jako możliwe cele ruchu ramienia. Na tablecie przed uczestnikami widniało te same sześć kolorów i mieli oni stuknąć w pole, które według nich robot sięgnie jako następne, tak szybko i precyzyjnie, jak potrafią. Zaraz po każdym przewidywaniu wykonywali krótkie, limitowane czasowo zadanie pamięciowo-poszukiwawcze na tablecie. Im szybciej odgadli ruch robota, tym więcej czasu pozostawało na to drugie zadanie — naśladując wielozadaniowe wymagania prawdziwej pracy fabrycznej.
Oczy robota, strzałki czy brak wskazówek
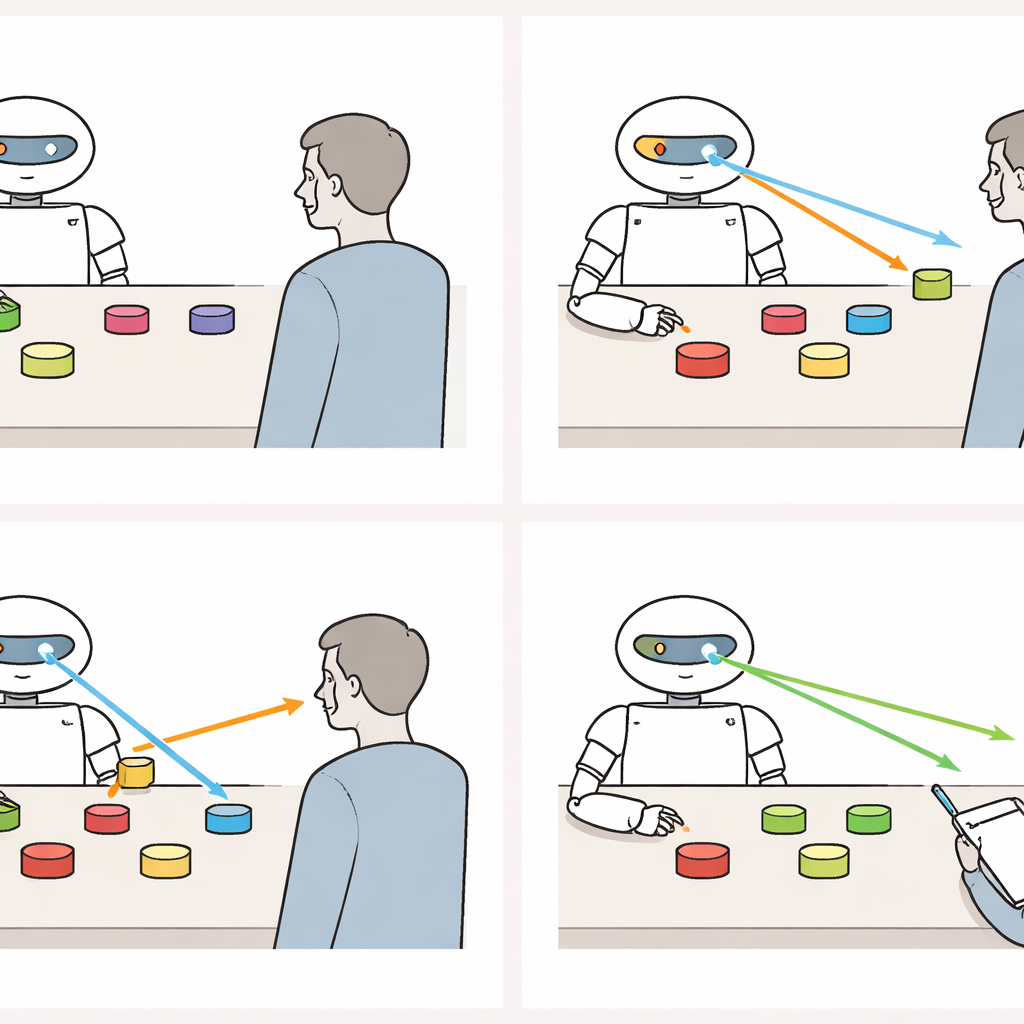
W dwóch oddzielnych lecz niemal identycznych badaniach uczestnicy losowo trafiali do jednej z trzech wersji wyświetlacza robota: robota z abstrakcyjnymi kształtami przypominającymi oczy, robota używającego strzałek kierunkowych lub robota z pustym ekranem bez żadnych wskazówek. W warunkach z wskazówkami oczy lub strzałki obracały się w stronę poprawnego kolorowego pola na sekundę przed rozpoczęciem ruchu ramienia i utrzymywały tę orientację. Uczestnikom jasno powiedziano, że te wskazówki są predykcyjne, a faza demonstracyjna pokazała kilka przykładów przed właściwymi próbami. W środkowym bloku prób badacze po cichu wprowadzili dwa zdarzenia „błędne” w warunkach ze wskazówkami, gdy oczy lub strzałki wskazywały jedno pole, a ramie sięgało do innego. Okulograficzne okulary rejestrowały, gdzie i kiedy uczestnicy patrzyli podczas każdej próby.
Kierowanie uwagi i przyspieszanie decyzji
Gdy wskazówki robota były wiarygodne, wyświetlacz z oczami miał wyraźną przewagę. Uczestnicy, którzy widzieli „oczy” robota, przenosili wzrok na poprawny cel szybciej niż ci bez wskazówek, i generalnie szybciej niż osoby, które widziały strzałki. Potwierdzali też swoje przewidywania na tablecie szybciej, czasem niemal o pełną sekundę wcześniej niż osoby pracujące z robotem bez wskazówek. Strzałki także pomagały, ale ich korzyści były mniejsze i mniej spójne pomiędzy dwoma badaniami. Co ważne, dokładność pozostała wysoka we wszystkich warunkach: korzystanie ze wskazówek pozwalało szybciej decydować bez zwiększania liczby błędów. Dane z pomiaru wzroku pokazały, że uczestnicy rzeczywiście patrzyli na wyświetlacz robota w warunkach ze wskazówkami, a ci, którzy robili to częściej, mieli tendencję do szybszego przewidywania ruchów robota i lepszej wydajności w wymagającym zadaniu pamięciowym, które następowało potem.
Co się dzieje, gdy robot wprowadza w błąd
Obraz zmienił się natychmiast, gdy robot złamał swoją obietnicę. Gdy oczy lub strzałki wskazywały jeden kierunek, a ramię sięgało gdzie indziej, uczestnicy zwalniali. W kolejnych próbach dłużej skupiali wzrok na celu i dłużej dokonywali przewidywań, niwecząc wcześniejszą przewagę czasową nad grupą bez wskazówek. Zmieniło się też zachowanie wzrokowe: ludzie rzadziej patrzyli na wyświetlacz robota, zamiast tego dłużej i uważniej śledzili poruszające się ramię, jakby sprawdzając jego działanie. Pomimo tego zakłócenia szkody nie były trwałe. W końcowym bloku prób bez błędów uwaga i szybkość przewidywań częściowo wróciły, a warunek z oczami ponownie miał tendencję do przewyższania warunku bez wskazówek, choć nie zawsze tak wyraźnie jak przed wystąpieniem błędów.
Zaufanie do pomocnego, lecz zawodnego partnera
Równolegle z wydajnością badacze mierzyli, ile uczestnicy raportowali zaufania do robota w czterech punktach: przed jakąkolwiek interakcją, po początkowym okresie bezbłędnego działania, bezpośrednio po błędach wskazówek oraz po końcowym bloku bez błędów. Zaufanie podążało znanym wzorcem. Wzrastało nieco przy płynnej, przewidywalnej współpracy, ostro spadało, gdy wskazówki wprowadziły użytkownika w błąd, a potem ponownie rosło, gdy robot znów zachowywał się wiarygodnie. Wzrosty i spadki pojawiały się tylko w warunkach z predykcyjnymi wskazówkami, gdzie uczestnicy mieli oczekiwania, które można było naruszyć; zaufanie do robota bez wskazówek pozostawało stosunkowo stałe, ponieważ ten robot nigdy nie wysyłał mylących sygnałów. Co ciekawe, oceny obciążenia pracą nie wykazały wyraźnego wzorca, co sugeruje, że dodanie predykcyjnych oczu lub strzałek nie sprawiało, że zadanie było jednoznacznie trudniejsze ani łatwiejsze w odbiorze uczestników.
Co to oznacza dla osób pracujących z robotami
Dla osoby postronnej wniosek jest prosty: nadanie robotowi fabrycznemu ekspresyjnych „oczu” lub prostych strzałek może znacznie ułatwić odczytanie jego następnego ruchu, pomagając ludziom reagować szybciej bez straty dokładności. Te korzyści mają znaczenie w zatłoczonych, hałaśliwych miejscach pracy, gdzie polecenia werbalne są ograniczone. Badanie pokazuje jednak także kompromis. Gdy wizualne wskazówki robota okazują się od czasu do czasu błędne, ludzie zwalniają, odwracają wzrok od wyświetlacza i mniej ufają systemowi — przynajmniej przez jakiś czas. Przy utrzymaniu wiarygodnego zachowania zarówno wydajność, jak i zaufanie mogą się odbudować. Dla projektantów przyszłych stanowisk człowiek-robot przesłanie jest takie, że predykcyjne wskazówki wizualne to potężne narzędzie do kierowania uwagą i koordynacji, ale ich wartość zależy krytycznie od utrzymania ich rzetelności, jasnego wyjaśnienia ich znaczenia i zaplanowania procedur odzyskiwania zaufania, gdy rzadkie błędy nieuchronnie się pojawią.
Cytowanie: Naendrup-Poell, L., Onnasch, L. Predictive robot eyes shape visual attention, performance, and trust in interaction with an industrial CoBot. Sci Rep 16, 14171 (2026). https://doi.org/10.1038/s41598-026-50476-4
Słowa kluczowe: współpraca człowiek-robot, uwaga wzrokowa, wskaźniki predykcyjne, zaufanie do automatyzacji, przemysłowe coboty