Clear Sky Science · es
Los ojos predictivos del robot modelan la atención visual, el rendimiento y la confianza en la interacción con un CoBot industrial
Por qué importan los ojos del robot en el trabajo
En muchas fábricas modernas, las personas comparten ya sus puestos de trabajo con robots colaborativos, o “CoBots”. Estas máquinas están diseñadas para trabajar junto a los humanos, entregando piezas o herramientas en lugar de permanecer encerradas tras vallas de seguridad. Pero para que esta colaboración resulte segura y eficiente, los trabajadores deben poder anticipar qué hará el robot a continuación. Este estudio plantea una pregunta sencilla con grandes consecuencias prácticas: ¿pueden los “ojos” de un robot o unas flechas simples ayudar a las personas a entender rápidamente su siguiente movimiento, y qué ocurre con el rendimiento y la confianza cuando esas pistas visuales resultan ocasionalmente incorrectas?
Preparando un espacio de trabajo compartido
Los investigadores llevaron voluntarios a un laboratorio con un brazo robótico colaborativo industrial llamado Sawyer. Entre la persona y el robot había una mesa con seis cuadrados de colores que servían como posibles objetivos de movimiento para el brazo. En una tableta frente a ellos, los participantes veían los mismos seis colores y tenían que tocar el cuadrado que pensaban que el robot alcanzaría a continuación, lo más rápido y preciso posible. Justo después de cada predicción completaban una breve tarea cronometrada de memoria y búsqueda en la tableta. Cuanto más rápido adivinaran el movimiento del robot, más tiempo les quedaba para esta segunda tarea, replicando las demandas de multitarea del trabajo real en fábrica.
Ojos del robot, flechas o ausencia de pistas
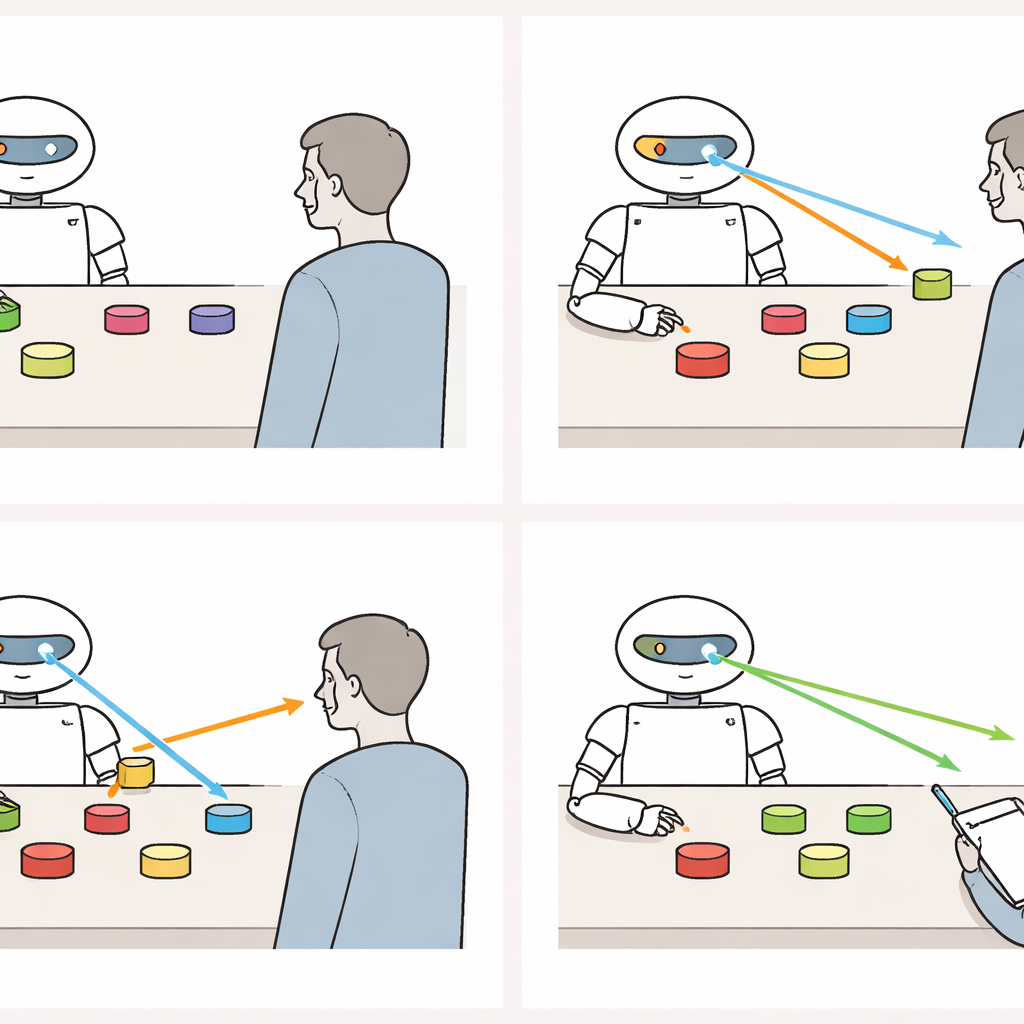
En dos estudios separados pero casi idénticos, las personas fueron asignadas al azar para interactuar con uno de tres tipos de pantalla del robot: un robot con formas abstractas similares a ojos en su pantalla, un robot que usaba flechas direccionales, o un robot con pantalla en blanco sin pistas visuales. En las condiciones con señalización, los ojos o las flechas se giraban hacia el cuadrado de color correcto un segundo antes de que el brazo empezara a moverse y luego mantenían esa dirección. Se informó claramente a los participantes de que estas señales eran predictivas, y una fase de demostración mostró varios ejemplos antes de comenzar los ensayos reales. En el bloque intermedio de ensayos, los investigadores introdujeron en secreto dos eventos de “error” en las condiciones con señales, en los que los ojos o las flechas apuntaban a un cuadrado pero el brazo se movía hacia otro. Unas gafas de seguimiento ocular registraron dónde y cuándo miraban los participantes durante cada ensayo.
Guiar la atención y acelerar las decisiones
Cuando las señales del robot eran fiables, la pantalla con forma de ojos tuvo una ventaja clara. Los participantes que vieron ojos robóticos dirigieron su mirada hacia el objetivo correcto más rápido que quienes no recibieron pistas, y generalmente más rápido que quienes vieron flechas. Además, confirmaron sus predicciones en la tableta antes, a veces casi un segundo antes que las personas que trabajaban con un robot sin señales. Las flechas también ayudaron, pero sus beneficios fueron menores y menos consistentes entre los dos estudios. Es importante que la precisión se mantuvo alta en todas las condiciones: usar las señales permitió decidir más rápido sin cometer más errores. Los datos de seguimiento ocular mostraron que los participantes sí miraban la pantalla del robot en las condiciones con señales, y quienes la consultaban con más frecuencia tendían a predecir los movimientos del robot con mayor rapidez y a desempeñarse mejor en la exigente tarea de memoria que seguía.
Qué ocurre cuando el robot te engaña
La situación cambió en cuanto el robot rompió su promesa. Cuando los ojos o las flechas señalaron una dirección y el brazo alcanzó otra, los participantes se ralentizaron. En ensayos posteriores tardaron más en fijar el objetivo con la mirada y más en hacer sus predicciones, borrando la ventaja de velocidad anterior frente al grupo sin señales. Su comportamiento visual también se modificó: la gente redujo cuánto miraba la pantalla del robot y, en cambio, empezó a observar el brazo robótico en movimiento con más atención y durante más tiempo, como comprobando dos veces sus acciones. A pesar de esta interrupción, el daño no fue permanente. En el bloque final de ensayos sin errores, la atención y la velocidad de predicción se recuperaron parcialmente, y la condición de ojos volvió a tender a superar a la condición sin señales, aunque no siempre con la misma fuerza que antes de los errores.
Confiar en un compañero útil pero falible
Además del rendimiento, los investigadores midieron cuánto confiaban los participantes en el robot en cuatro momentos: antes de cualquier interacción, tras un primer tramo de comportamiento impecable, inmediatamente después de los errores de señalización y después de un bloque final sin errores. La confianza siguió una ola familiar. Aumentó algo con la interacción fluida y predecible, bajó bruscamente cuando las señales engañaron al usuario y luego subió de nuevo una vez que el robot volvió a comportarse de forma fiable. Estas subidas y bajadas aparecieron solo en las condiciones con señales predictivas, donde las personas tenían expectativas que pudieron verse frustradas; la confianza en el robot sin señales se mantuvo relativamente estable porque ese robot nunca dio indicaciones engañosas. Resulta interesante que las valoraciones de carga de trabajo no mostraron un patrón claro, lo que sugiere que añadir ojos o flechas predictivas no hacía que la tarea se sintiera de forma consistente más difícil ni más fácil.
Qué significa esto para las personas que trabajan con robots
Para un observador no especializado, la conclusión es sencilla: dotar a un robot de fábrica de “ojos” expresivos o de flechas simples puede facilitar mucho ver qué hará a continuación, ayudando a las personas a reaccionar más rápido sin sacrificar la precisión. Estas mejoras importan en entornos concurridos y ruidosos donde las instrucciones verbales son limitadas. Pero el estudio también muestra una compensación. Cuando las pistas visuales del robot señalan ocasionalmente en la dirección equivocada, las personas se ralentizan, dejan de mirar la pantalla y confían menos en el sistema—al menos por un tiempo. Con un comportamiento continuado y fiable, tanto el rendimiento como la confianza pueden recuperarse. Para los diseñadores de futuros puestos de trabajo humano-robot, el mensaje es que las señales visuales predictivas son herramientas poderosas para la atención y la coordinación, pero su valor depende críticamente de mantenerlas honestas, explicar claramente su significado y planificar cómo recuperarse cuando ocurran errores raros e inevitables.
Cita: Naendrup-Poell, L., Onnasch, L. Predictive robot eyes shape visual attention, performance, and trust in interaction with an industrial CoBot. Sci Rep 16, 14171 (2026). https://doi.org/10.1038/s41598-026-50476-4
Palabras clave: colaboración humano-robot, atención visual, señales predictivas, confianza en la automatización, cobots industriales