Clear Sky Science · ja
予測的なロボットの“目”は視覚的注意、作業遂行、工業用CoBotとの信頼に影響する
職場でロボットの“目”が重要な理由
現代の多くの工場では、人が協働ロボット(CoBot)と作業スペースを共有することが増えています。これらの機械は安全柵の後ろに置かれるのではなく、人と並んで部品や工具を手渡すように設計されています。しかし、この協働が安全で効率的に感じられるためには、作業者がロボットの次の動作を予測できることが重要です。本研究は実務的に大きな意味を持つ単純な問いを投げかけます:ロボットの“目”や単純な矢印が、人に次の動きを素早く理解させるのに役立つか、そしてその視覚的手がかりが時折誤っていたときに遂行と信頼にどんな影響が出るか、という点です。
共有ロボット作業空間の設定
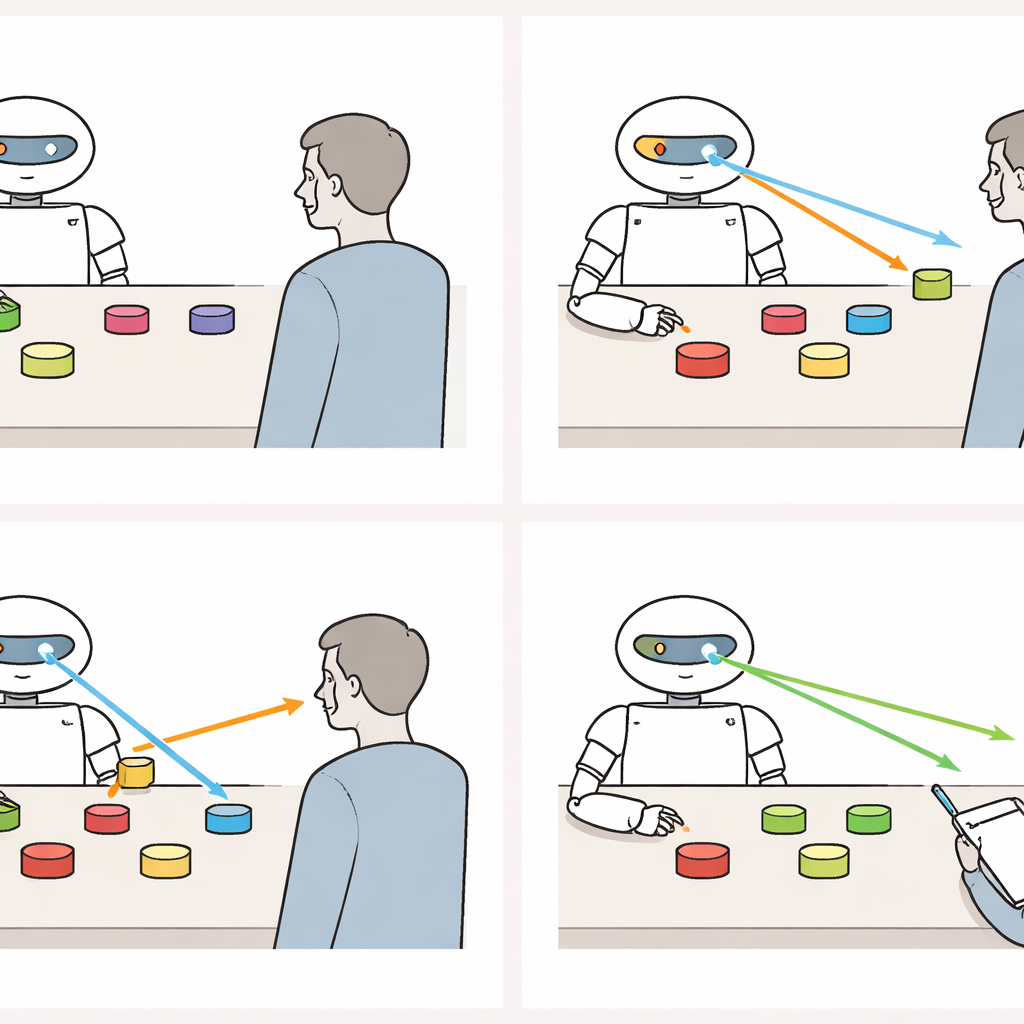
研究者は被験者をラボに招き、産業用協働ロボットアーム「Sawyer」との実験を行いました。人とロボットの間のテーブルには6つの色の四角が置かれ、アームの移動先候補として使われました。目の前のタブレットには同じ6色が表示され、参加者はロボットが次に到達すると予想する四角をできるだけ速く正確にタップする必要がありました。予測を入力した直後に、参加者はタブレット上で短時間の記憶・探索課題を行いました。ロボットの動きを早く当てれば、その分この二つ目の課題に使える時間が増えるため、実際の工場でのマルチタスク要求を模した設計です。
ロボットの“目”、矢印、あるいは手がかりなし
ほぼ同一の2つの研究で、参加者はランダムに3種類のロボット表示のいずれかとやり取りするよう割り当てられました:画面に抽象的な目の形を表示するロボット、方向を示す矢印を用いるロボット、あるいは画面が空白で視覚的手がかりを提供しないロボットです。手がかり条件では、目や矢印がアームの動き開始の1秒前に正しい色の四角の方を向き、その方向を維持しました。参加者にはこれらの手がかりが予測的であることを明確に伝え、実試行前にいくつかの例を示すデモンストレーションを行いました。試行の中盤ブロックでは、手がかり条件に密かに2回の“誤り”イベントを導入しました。すなわち目や矢印がある四角を指したにもかかわらず、アームが別の四角に移動する状況です。アイ・トラッキング用の眼鏡で各試行中の視線の場所と時刻を記録しました。
注意を誘導し意思決定を加速する
手がかりが信頼できるとき、目のような表示は明確な利点を示しました。ロボットの“目”を見た参加者は、手がかりのない場合よりも正しいターゲットへ視線を移すのが速く、一般に矢印を見た参加者より速かったことがわかりました。また、タブレットで予測を確定するのもより早く、手がかりのないロボットと比べてほぼ1秒近く早まることもありました。矢印も効果はありましたが、その利得は小さく、2つの研究で一貫性が低い傾向がありました。重要なのは、正確性はすべての条件で高水準に保たれていた点です:手がかりを使うことで、誤りを増やすことなくより速く判断できました。アイ・トラッキングのデータは、手がかり条件では参加者が実際にロボットの表示を見ており、表示を頻繁に見た人ほどロボットの動きを速く予測し、その後の負荷の高い記憶課題でもより良い成績を出す傾向があったことを示しました。
ロボットが誤誘導したらどうなるか
ロボットが約束を破ると状況は変わりました。目や矢印がある方向を指し、アームが別の場所へ動いたとき、参加者は減速しました。以降の試行では、対象を視線でとらえるまでの時間や予測を行うまでの時間が長くなり、手がかりなし群に対する以前の速度上の利点が消えました。視線行動も変化しました:参加者はロボットの表示を見る頻度を減らし、代わりに動くロボットアームをより長く、より注意深く見つめるようになりました。まるでその動作を二重に確認しているかのようです。とはいえ、この混乱は永続的ではありませんでした。最後の誤りのないブロックでは、注意と予測の速度は部分的に回復し、目の条件は再び手がかりなし条件より有利になる傾向を示しましたが、誤り以前ほど強くない場合もありました。
役に立つが誤りのあるパートナーを信頼すること
遂行の評価に加えて、研究者は参加者がどれだけロボットを信頼したかを四つの時点で測定しました:相互作用前、初期の欠陥のない挙動の後、手がかり誤り直後、そして最終の誤りのないブロックの後です。信頼はよく知られた波形を描きました。滑らかで予測可能な相互作用ではやや上昇し、手がかりが誤ったときには急落し、その後ロボットが再び信頼できる振る舞いを示すと回復しました。こうした変動は予測的手がかりのある条件でのみ起きました。手がかりのないロボットでは、誤誘導される期待自体が存在しないため、信頼は比較的安定していました。興味深いことに、作業負荷の評価には明確な傾向が見られず、予測的な目や矢印を付け加えても課題が一貫して難しくなったり簡単になったりするわけではないことを示唆します。
ロボットと働く人々への含意
一般的な観点からの結論は明快です:工場のロボットに表情めいた「目」や単純な矢印を与えることで、次に何をするかを把握しやすくなり、精度を損なうことなく人がより迅速に反応できるようになります。これは音声指示が限られる賑やかな職場で特に重要です。しかし同時にトレードオフも示しています。ロボットの視覚的手がかりが時折誤った方向を示すと、人は動作を遅らせ、表示から目をそらし、システムへの信頼を一時的に失います。継続して信頼できる振る舞いが続けば、遂行と信頼は回復し得ます。今後の人間とロボットの共同作業ステーションの設計においては、予測的な視覚手がかりは注意と協調を促す強力な道具ですが、その価値は手がかりの正確さを維持すること、意味を明確に説明すること、そして起こり得る稀な誤りからの回復計画を用意することに大きく依存する、という点が重要です。
引用: Naendrup-Poell, L., Onnasch, L. Predictive robot eyes shape visual attention, performance, and trust in interaction with an industrial CoBot. Sci Rep 16, 14171 (2026). https://doi.org/10.1038/s41598-026-50476-4
キーワード: 人間とロボットの協働, 視覚的注意, 予測的手がかり, 自動化への信頼, 工業用コボット