Clear Sky Science · nl
Voorspellende robotogen sturen visuele aandacht, prestaties en vertrouwen in interactie met een industriële CoBot
Waarom robotogen op de werkvloer ertoe doen
In veel moderne fabrieken delen mensen tegenwoordig hun werkplek met collaboratieve robots, of "CoBots." Deze machines zijn zo ontworpen dat ze naast mensen kunnen werken en onderdelen of gereedschap kunnen aanreiken in plaats van opgesloten te zitten achter hekwerken. Maar voor deze samenwerking veilig en efficiënt aanvoelt, moeten werknemers kunnen inschatten wat de robot hierna gaat doen. Deze studie stelt een eenvoudige vraag met grote praktische consequenties: kunnen de "ogen" van een robot of simpele pijlen mensen helpen snel zijn volgende beweging te begrijpen, en wat gebeurt er met prestaties en vertrouwen wanneer die visuele aanwijzingen af en toe onjuist blijken te zijn?
Een gedeelde robotwerkplek opzetten
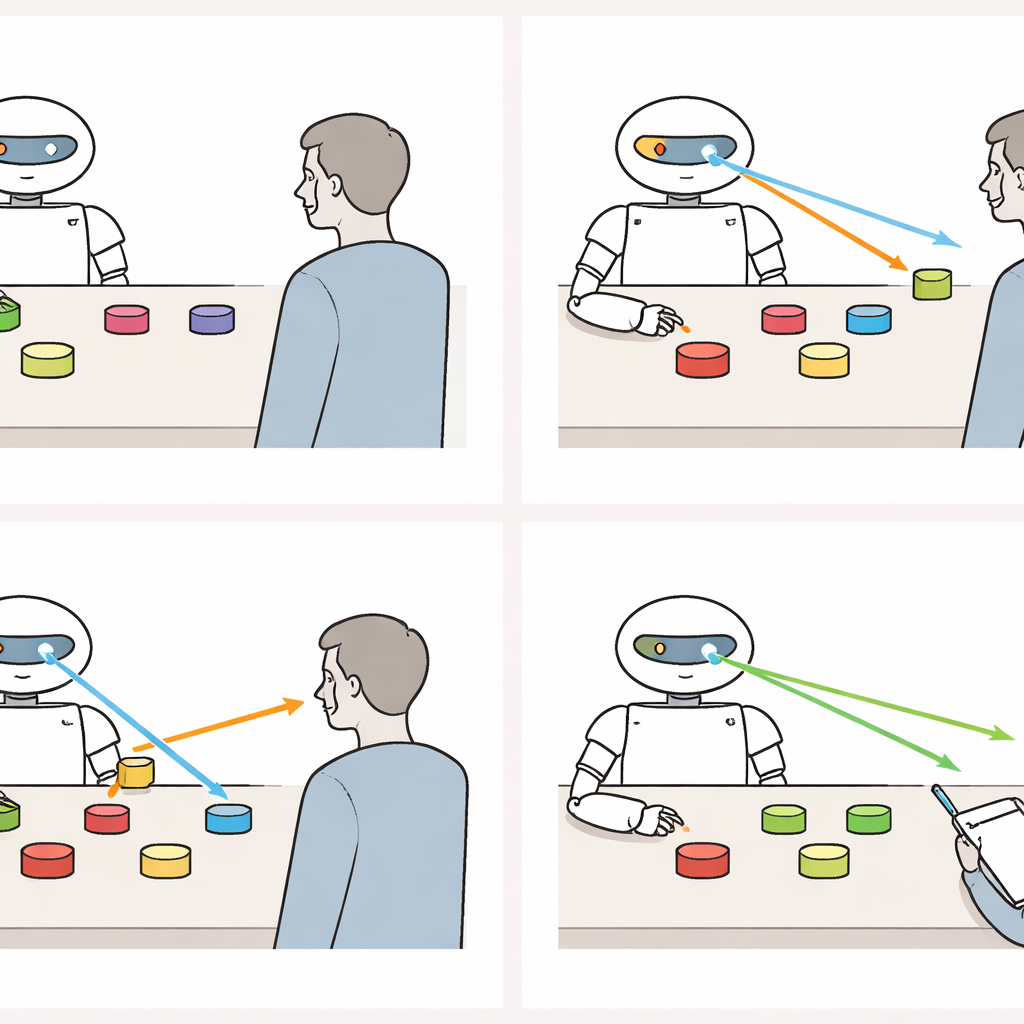
De onderzoekers lieten vrijwilligers in een laboratorium werken met een industriële collaboratieve robotarm genaamd Sawyer. Tussen de persoon en de robot stond een tafel met zes gekleurde vakken die als mogelijke bewegingsdoelen voor de arm dienden. Op een tablet voor hen zagen deelnemers dezelfde zes kleuren en moesten ze het vak aanraken waarvan ze dachten dat de robot er als volgende naar zou reiken, zo snel en nauwkeurig mogelijk. Direct na elke voorspelling voerden ze op de tablet een korte, getimede geheugenen-zoektaak uit. Hoe sneller ze de beweging van de robot raadden, hoe meer tijd ze overhielden voor deze tweede taak, wat de multitasking-eisen van echt fabriekswerk nabootst.
Robotogen, pijlen of helemaal geen aanwijzingen
In twee afzonderlijke maar vrijwel identieke studies werden mensen willekeurig toegewezen aan een van drie robotdisplaytypes: een robot met abstracte oogachtige vormen op het scherm, een robot die richtingpijlen gebruikte, of een robot met een leeg scherm zonder visuele aanwijzingen. In de cue-condities draaiden de ogen of pijlen één seconde voordat de arm begon te bewegen naar het juiste gekleurde vak en hielden ze die richting aan. Deelnemers kregen duidelijk te horen dat deze aanwijzingen voorspellend waren, en een demonstratiefase toonde meerdere voorbeelden voordat de echte proeven begonnen. In het middenblok van de proeven introduceerden de onderzoekers heimelijk twee "fout"-gebeurtenissen in de cue-condities, waarbij de ogen of pijlen naar één vak wezen maar de arm naar een ander vak bewoog. Eye-trackingbrillen registreerden waar en wanneer deelnemers tijdens elke proef keken.
Aandacht sturen en beslissingen versnellen
Wanneer de aanwijzingen van de robot betrouwbaar waren, had het oogachtige display een duidelijk voordeel. Deelnemers die robotogen zagen verplaatsten hun blik sneller naar het juiste doel dan degenen zonder aanwijzingen, en over het algemeen sneller dan degenen die pijlen zagen. Ze bevestigden hun voorspellingen op de tablet ook eerder, soms bijna een volle seconde sneller dan mensen die met een robot zonder aanwijzingen werkten. Pijlen hielpen ook, maar hun voordelen waren kleiner en minder consistent tussen de twee studies. Belangrijk is dat de nauwkeurigheid in alle condities hoog bleef: het gebruik van de aanwijzingen liet mensen sneller beslissen zonder meer fouten te maken. De eye-trackinggegevens toonden dat deelnemers in de cue-condities daadwerkelijk naar het robotdisplay keken, en degenen die er vaker naar keken voorspelden de bewegingen van de robot doorgaans sneller en presteerden beter op de veeleisende geheugentaak die volgde.
Wat gebeurt er als de robot je misleidt
Het beeld veranderde zodra de robot zijn belofte brak. Wanneer de ogen of pijlen de ene kant op wezen en de arm ergens anders naartoe bewoog, vertraagden deelnemers. In latere proeven deden ze er langer over om het doel met hun ogen te fixeren en langer om hun voorspellingen te maken, waardoor het eerdere snelheidsvoordeel ten opzichte van de geen-aanwijzing-groep verdween. Hun kijkgedrag verschoof ook: mensen keken minder naar het robotdisplay en keken in plaats daarvan langer en aandachtiger naar de bewegende robotarm, alsof ze de acties dubbelcontroleerden. Ondanks deze verstoring was de schade niet permanent. In het laatste blok van foutvrije proeven herstelden aandacht en voorspellingssnelheid gedeeltelijk, en de oogconditie presteerde weer vaak beter dan de geen-aanwijzingconditie, zij het niet altijd zo sterk als vóór de fouten.
Vertrouwen in een behulpzame maar feilbare partner
Nederland gebruikten de onderzoekers naast de prestaties ook vragenlijsten om te meten hoeveel vertrouwen mensen in de robot meldden op vier momenten: vóór enige interactie, na een eerste periode van vlekkeloos gedrag, direct na de cue-fouten en na een laatste foutvrije serie. Het vertrouwen volgde een bekend patroon. Het steeg enigszins bij soepele, voorspelbare interactie, daalde scherp toen de aanwijzingen de gebruiker misleidden, en klom vervolgens weer omhoog zodra de robot betrouwbaar handelde. Deze stijgingen en dalingen deden zich alleen voor in de condities met voorspellende aanwijzingen, waar mensen daadwerkelijk verwachtingen hadden die geschonden konden worden; het vertrouwen in de robot zonder aanwijzingen bleef relatief stabiel omdat die robot nooit misleidende signalen gaf. Interessant genoeg lieten de beoordelingen van werkbelasting geen duidelijk patroon zien, wat suggereert dat het toevoegen van voorspellende ogen of pijlen de taak niet consistent zwaarder of lichter liet aanvoelen.
Wat dit betekent voor mensen die met robots werken
Voor een algemene waarnemer is de conclusie helder: een fabrieksrobot expressieve "ogen" of simpele pijlen geven kan het veel makkelijker maken te zien wat hij hierna zal doen, waardoor mensen sneller kunnen reageren zonder aan nauwkeurigheid in te boeten. Deze winst is belangrijk in drukke, lawaaierige werkomgevingen waar gesproken instructies beperkt zijn. Maar de studie toont ook een afweging. Wanneer de visuele aanwijzingen van de robot af en toe de verkeerde kant op wijzen, vertragen mensen, kijken ze weg van het display en verliezen ze tijdelijk vertrouwen in het systeem. Bij aanhoudend betrouwbaar gedrag kunnen zowel prestaties als vertrouwen zich echter herstellen. Voor ontwerpers van toekomstige mens-robot werkplekken is de boodschap dat voorspellende visuele aanwijzingen krachtige instrumenten zijn voor aandacht en coördinatie, maar dat hun waarde kritisch afhangt van het eerlijk houden van die aanwijzingen, het duidelijk uitleggen van hun betekenis en het plannen van herstelstrategieën voor wanneer zeldzame fouten onvermijdelijk optreden.
Bronvermelding: Naendrup-Poell, L., Onnasch, L. Predictive robot eyes shape visual attention, performance, and trust in interaction with an industrial CoBot. Sci Rep 16, 14171 (2026). https://doi.org/10.1038/s41598-026-50476-4
Trefwoorden: mens-robot samenwerking, visuele aandacht, voorspellende aanwijzingen, vertrouwen in automatisering, industriële cobots