Clear Sky Science · fr
Les yeux prédictifs des robots modèlent l’attention visuelle, les performances et la confiance dans l’interaction avec un CoBot industriel
Pourquoi les yeux du robot comptent au travail
Dans de nombreuses usines modernes, des personnes partagent désormais leur poste de travail avec des robots collaboratifs, ou « CoBots ». Ces machines sont conçues pour travailler côte à côte avec des humains, en passant des pièces ou des outils au lieu d’être confinées derrière des barrières de sécurité. Mais pour que ce partenariat paraisse sûr et efficace, les opérateurs doivent pouvoir anticiper ce que le robot va faire ensuite. Cette étude pose une question simple aux conséquences pratiques importantes : les « yeux » d’un robot ou de simples flèches permettent-ils aux personnes de comprendre rapidement son prochain mouvement, et qu’advient-il des performances et de la confiance quand ces indices visuels se révèlent parfois faux ?
Mise en place d’un espace de travail partagé
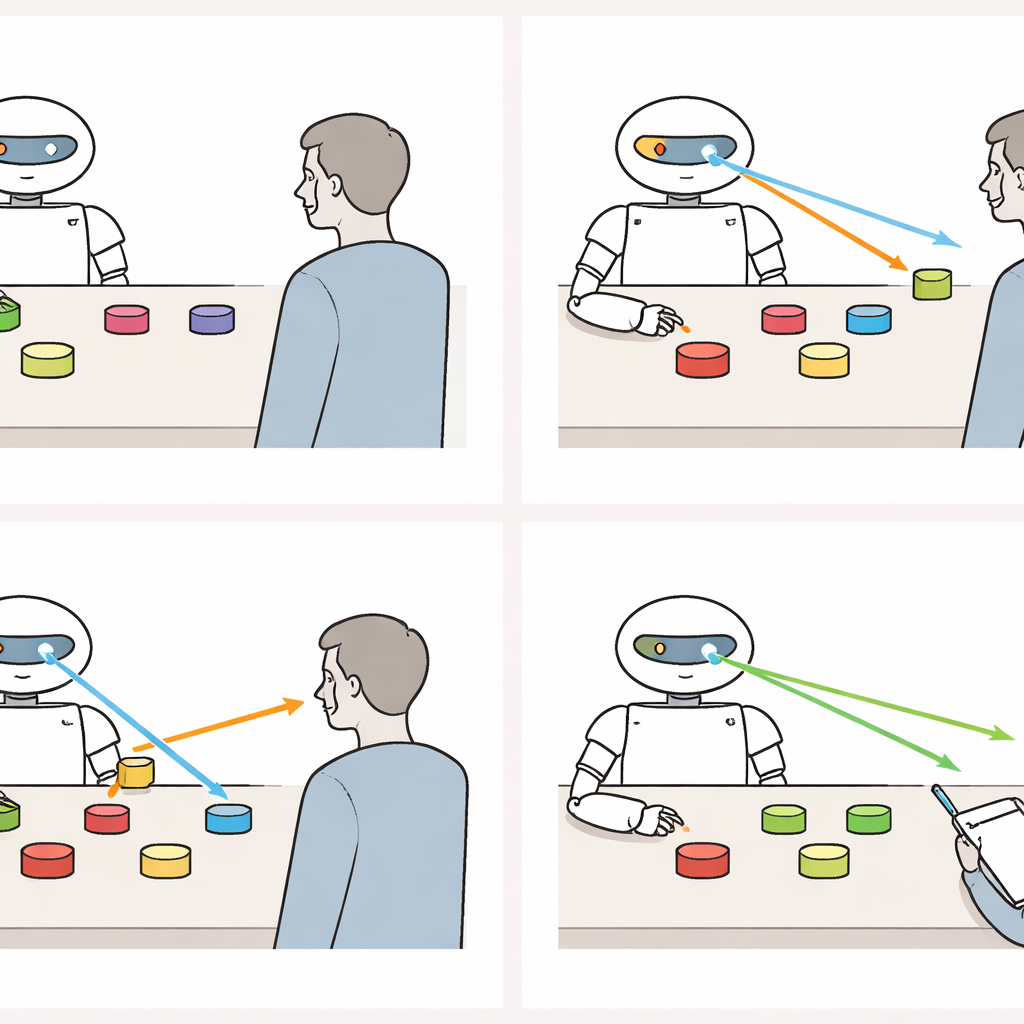
Les chercheur·e·s ont invité des volontaires dans un laboratoire équipé d’un bras robotique collaboratif industriel nommé Sawyer. Entre la personne et le robot se trouvait une table avec six carrés colorés servant de cibles possibles pour le bras. Sur une tablette devant eux, les participant·e·s voyaient les mêmes six couleurs et devaient toucher le carré qu’ils pensaient que le robot atteindrait ensuite, aussi vite et précisément que possible. Juste après chaque prédiction, ils effectuaient une brève tâche chronométrée de mémoire et de recherche sur la tablette. Plus ils devinaient rapidement le mouvement du robot, plus il leur restait de temps pour cette seconde tâche, reproduisant les exigences de multitâche du travail en usine.
Yeux du robot, flèches ou absence d’indice
Au cours de deux études séparées mais presque identiques, les participant·e·s étaient assigné·e·s au hasard à l’un des trois types d’affichage du robot : un robot avec des formes abstraites évoquant des yeux sur son écran, un robot qui utilisait des flèches directionnelles, ou un robot à écran vierge sans indice visuel. Dans les conditions avec indice, les yeux ou les flèches se tournaient vers le carré coloré correct une seconde avant que le bras ne commence à bouger, puis restaient orientés dans cette direction. Les participant·e·s étaient clairement informé·e·s que ces indices étaient prédictifs, et une phase de démonstration montrait plusieurs exemples avant le début des essais réels. Dans le bloc central d’essais, les chercheur·e·s ont introduit secrètement deux événements d’« erreur » dans les conditions avec indice, où les yeux ou les flèches indiquaient un carré alors que le bras se déplaçait vers un autre. Des lunettes d’eye-tracking ont enregistré où et quand les participant·e·s regardaient pendant chaque essai.
Orienter l’attention et accélérer les décisions
Lorsque les indices du robot étaient fiables, l’affichage en forme d’yeux montrait un avantage net. Les participant·e·s qui voyaient des yeux robotiques déplaçaient leur regard vers la cible correcte plus rapidement que celles et ceux qui n’avaient aucun indice, et généralement plus vite que celles et ceux qui voyaient des flèches. Ils validaient aussi leurs prédictions sur la tablette plus tôt, parfois presque une seconde complète avant les personnes travaillant avec un robot sans indice. Les flèches aidaient également, mais leurs bénéfices étaient plus faibles et moins cohérents entre les deux études. Fait important, la précision restait élevée dans toutes les conditions : l’utilisation des indices permettait de décider plus vite sans commettre davantage d’erreurs. Les données d’eye-tracking montraient que les participant·e·s regardaient réellement l’affichage du robot dans les conditions avec indice, et celles et ceux qui le regardaient plus souvent tendaient à prédire les mouvements du robot plus rapidement et à mieux réussir la tâche exigeante de mémoire qui suivait.
Que se passe-t-il quand le robot vous induit en erreur
Le tableau a changé dès que le robot a manqué à sa promesse. Quand les yeux ou les flèches indiquaient une direction et que le bras atteignait un autre emplacement, les participant·e·s ralentissaient. Dans les essais suivants, ils prenaient plus de temps pour fixer la cible du regard et plus de temps pour faire leurs prédictions, annulant ainsi l’avantage de vitesse observé précédemment par rapport au groupe sans indice. Leur comportement visuel évoluait aussi : les personnes regardaient moins l’affichage du robot et observaient plutôt le bras en mouvement plus attentivement et plus longtemps, comme pour vérifier ses actions. Malgré cette perturbation, l’effet n’était pas permanent. Dans le dernier bloc d’essais sans erreur, l’attention et la vitesse de prédiction se sont partiellement rétablies, et la condition « yeux » tendait à nouveau à surpasser la condition sans indice, quoique pas toujours aussi nettement qu’avant les erreurs.
Avoir confiance en un partenaire utile mais faillible
Parallèlement aux performances, les chercheur·e·s ont mesuré la confiance rapportée par les participant·e·s envers le robot à quatre moments : avant toute interaction, après une première période de comportement sans faute, immédiatement après les erreurs d’indice, et après un bloc final sans erreur. La confiance a suivi une courbe familière. Elle augmentait quelque peu lors d’interactions fluides et prévisibles, chutait fortement quand les indices ont induit en erreur l’utilisateur·rice, puis remontait une fois le robot redevenu fiable. Ces variations sont apparues uniquement dans les conditions avec indices prédictifs, où les personnes avaient effectivement des attentes susceptibles d’être violées ; la confiance envers le robot sans indice est restée relativement stable car ce robot n’a jamais émis de signaux trompeurs. Fait intéressant, les évaluations de la charge de travail n’ont pas montré de tendance claire, ce qui suggère que l’ajout d’yeux ou de flèches prédictifs ne rendait pas systématiquement la tâche plus difficile ou plus facile.
Ce que cela signifie pour les personnes travaillant avec des robots
Pour un observateur non spécialiste, la conclusion est simple : doter un robot d’usine d’« yeux » expressifs ou de flèches simples peut faciliter grandement la compréhension de ses intentions, aidant les personnes à réagir plus rapidement sans sacrifier la précision. Ces gains comptent dans des environnements bruyants et chargés où les instructions orales sont limitées. Mais l’étude montre aussi un compromis. Quand les indices visuels du robot pointent parfois dans la mauvaise direction, les gens ralentissent, détournent le regard de l’affichage et font moins confiance au système — du moins pendant un certain temps. Avec un comportement fiable par la suite, les performances et la confiance peuvent rebondir. Pour les concepteurs de futurs postes de travail homme-robot, le message est que les indices visuels prédictifs sont des outils puissants pour l’attention et la coordination, mais que leur valeur dépend essentiellement de leur fiabilité, de l’explicitation de leur signification et de la préparation d’un plan de reprise lorsqu’une erreur rare survient inévitablement.
Citation: Naendrup-Poell, L., Onnasch, L. Predictive robot eyes shape visual attention, performance, and trust in interaction with an industrial CoBot. Sci Rep 16, 14171 (2026). https://doi.org/10.1038/s41598-026-50476-4
Mots-clés: collaboration homme-robot, attention visuelle, indicateurs prédictifs, confiance dans l’automatisation, cobots industriels