Clear Sky Science · zh
软体机械臂中触觉与视觉的传感融合用于果实采摘
为脆弱果实而生的温柔机器人
任何带回家却发现草莓被碰伤的人都知道,娇嫩的果实很容易受损。农民在大规模种植中也面临相同问题,因果实采摘时机不当或处理过于粗糙而损失大量收成。这项研究介绍了一种软体、满载传感器的机器人手,旨在像人类采摘者那样“看”和“摸”果实,从而能够温和、快速地采摘草莓和鳄梨等作物,并大幅减少浪费。 
为何田间需要软体之手
许多水果只在成熟度上给出细微线索。有些如果类,颜色变化缓慢并在数周内仍然坚实;而有些如果实,如莓类,则会迅速变软并在数日内开始变质。仅凭颜色常常不可靠,手动按压又存在压伤风险。人类采摘者长期以来依靠视觉与触觉的平衡来判断,但如今种植者面临劳动力短缺和大规模检验的巨大挑战。现有的农用机器人多依赖刚性金属夹持器和远离果实的相机,这使得准确判断颜色、大小和硬度变得困难,且仍可能伤害到娇嫩的农产品。
将视觉与触觉合于一体的紧凑夹持器
研究团队构建了一只呈星形的机器人手,五根软指围绕中央掌部排列。每根手指由可弯曲的橡胶状材料制成,通过向内注气实现弯曲。指体内隐藏着导光的透明塑料光纤,光线的变化可以反映每根手指的弯曲程度以及施加的压力。在指尖处,U形光纤作为触觉传感器,告诉系统所接触的是软物还是硬物。在掌部,微型摄像头与距离传感器并排放置,可对每个果实提供特写视图并测量其视在大小。所有这些通过小型电路板和计算机连接在一起,融合为夹持器所触及和所见信息的统一图景。
软体之手在果实上的表现
为了评估装置的能力,团队首先测量了手部的力学特性。软指的弯曲度可达近三分之二圆周,并与计算机仿真结果相匹配,夹持器闭合物体的时间不到两秒。它可提起最高一公斤的重量,超过自身重量的十六倍,其张开范围从中央的小开口扩展到足以包裹多种果实的区域。视觉系统在识别简单形状(如立方体和球体)时几乎总是正确,并在不同视距下将其尺寸估计到仅有百分之几的误差。通过关注每个像素的色调(基本色调),摄像头在固定照明下能够可靠地区分红色与绿色,尽管对相似红色草莓之间的微妙差异仍具挑战性。
能够区分硬与软的触觉
触觉与弯曲传感器让机器人手以补充视觉的方式“触摸”果实。当手指弯曲时,嵌入光纤内的光线以可预测的方式变化,使系统能够推断每根手指弯曲的程度以及物体的大致重量。在针对从非常软的橡胶到坚硬塑料的测试样品施压时,指尖触觉传感器表现出随着施力变化的明显光强变化。这使夹持器能够区分硬物与软物,并根据硬度感知未熟与成熟果实之间的差别。在演示中,机器人轻柔地抓取超市购买的草莓和鳄梨,测量它们的颜色和尺寸,并利用组合数据将成熟与未成熟样品分开,且无明显挫伤。内置的扭转模块甚至使手可以绕果柄旋转,将温室中的草莓从植株上摘下。 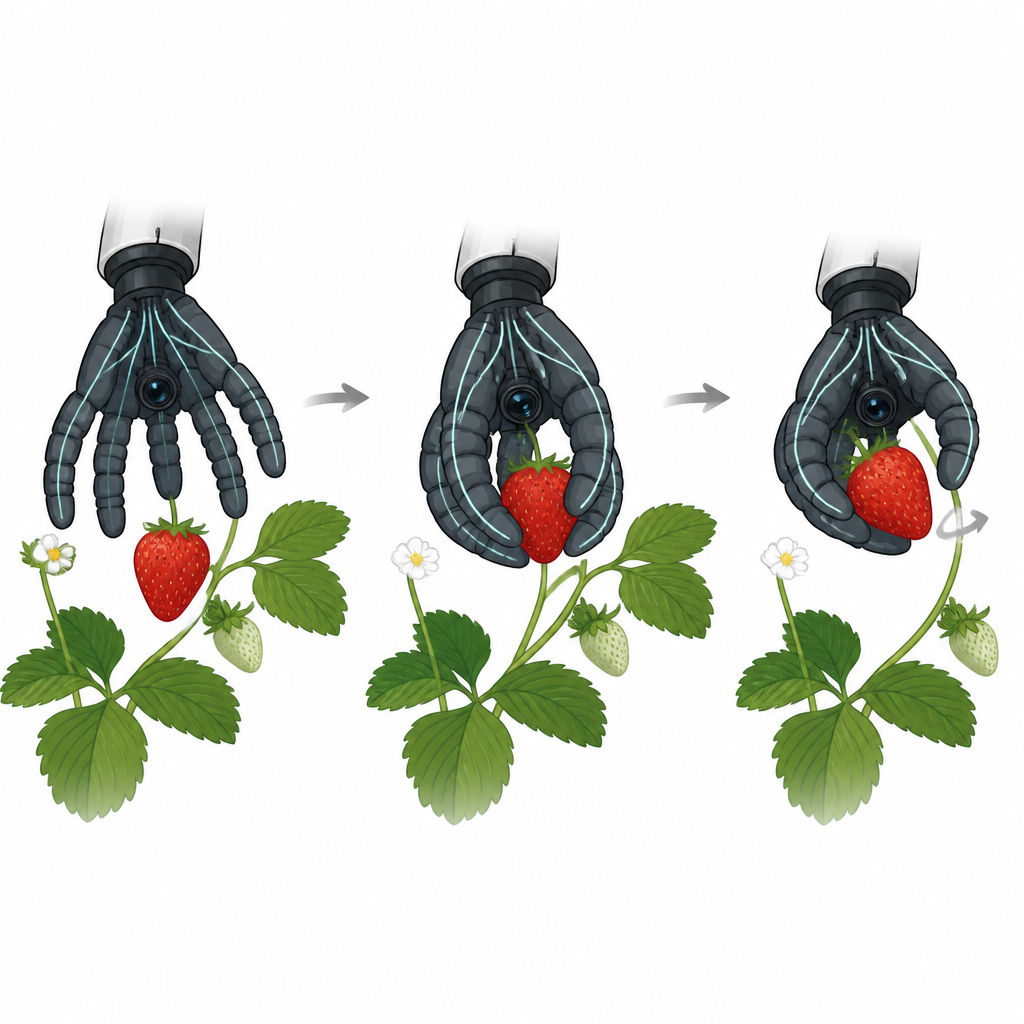
从实验室原型走向未来的农场助手
这些能力表明,单一软体夹持器能够在执行采摘操作的同时收集关于果实颜色、形状、大小和硬度的丰富信息。对种植者而言,这类工具可帮助更准确地决定采摘时机,减少手工挤压和分拣的需求,并降低因果实受损或过熟导致的损失。尽管当前系统仍面临实际问题,例如复杂的接线和可能被果汁污染的脆弱光纤,但它指向了这样一个未来:配备温柔且具感知能力之手的机器人,将帮助更多高完整度、高质量的果实从田间送到餐桌。
引用: Mishra, A.K., Ramaswami, A., Shree, V. et al. Sensor fusion of touch & vision in soft manipulators for fruit picking. Nat Commun 17, 4307 (2026). https://doi.org/10.1038/s41467-026-70588-9
关键词: 软体机器人, 果实采收, 触觉传感, 计算机视觉, 精准农业