Clear Sky Science · de
Sensorfusion von Tastsinn und Sehvermögen in weichen Manipulatoren für das Pflücken von Obst
Sanfte Roboter für empfindliches Obst
Wer schon einmal zu Hause mit zerdrückten Erdbeeren zu kämpfen hatte, weiß, wie leicht empfindliches Obst beschädigt werden kann. Landwirtinnen und Landwirte stehen vor demselben Problem in großem Maßstab und verlieren einen großen Teil der Ernte, weil Obst zur falschen Zeit gepflückt oder zu grob behandelt wird. Diese Studie stellt eine weiche, mit Sensoren ausgestattete Roboterhand vor, die Obst sehen und fühlen kann wie ein menschlicher Pflücker, sodass sie Beeren und Avocados schonend, schnell und mit deutlich weniger Abfall ernten kann. 
Warum weiche Hände auf dem Feld wichtig sind
Viele Früchte geben nur subtile Hinweise auf ihren Reifegrad. Einige, wie Zitrusfrüchte, verändern ihre Farbe langsam und bleiben wochenlang fest; andere, wie Beeren, werden schnell weicher und können innerhalb weniger Tage verderben. Die Farbe allein ist oft unzuverlässig, und Drücken mit der Hand birgt das Risiko von Quetschstellen. Menschliche Pflückerinnen und Pflücker haben lange das Gesehene mit dem Gefühlten abgewogen, doch Erzeuger kämpfen zunehmend mit Arbeitskräftemangel und dem riesigen Umfang der erforderlichen Kontrolle. Bisherige Feldroboter verlassen sich meist auf starre Metallgreifer und Kameras, die weit vom Obst entfernt angebracht sind, was die zuverlässige Einschätzung von Farbe, Größe und Festigkeit erschwert und empfindliche Produkte dennoch verletzen kann.
Sehen und Fühlen in einem kompakten Greifer
Die Forscher bauten eine sternförmige Roboterhand mit fünf weichen Fingern, die um eine zentrale Handfläche angeordnet sind. Jeder Finger besteht aus einem flexiblen, gummiähnlichen Material, das sich beim Einpumpen von Luft krümmt. In den Fingern sind transparente Kunststofffasern verborgen, die Licht leiten; Änderungen dieses Lichts zeigen, wie stark sich jeder Finger biegt und wie fest er gegen ein Objekt drückt. An den Fingerspitzen fungieren U-förmige Fasern als Tastsensoren und teilen dem System mit, ob es etwas Weiches oder Festes hält. In der Handfläche sitzen eine winzige Kamera und ein Abstandssensor nebeneinander, die eine Nahaufnahme jeder Frucht liefern und ihre scheinbare Größe messen. All dies ist über kleine Platinen und einen Computer verbunden, die die Signale zu einem einheitlichen Bild dessen kombinieren, was der Greifer berührt und sieht.
Wie die weiche Hand bei Obst abschneidet
Um die Fähigkeiten ihres Geräts zu prüfen, maß das Team zunächst die Mechanik der Hand. Die weichen Finger biegen sich bis zu etwa zwei Drittel eines Vollkreises und stimmen dabei mit Computersimulationen überein; der Greifer kann in weniger als zwei Sekunden schließen. Er kann bis zu einem Kilogramm heben, mehr als sechzehnmal so viel wie sein Eigengewicht, und seine Reichweite erweitert sich von einer kleinen zentralen Öffnung auf einen Bereich, der groß genug ist, um viele Obstsorten zu umschließen. Das Sehsystem erkannte einfache Formen wie Würfel und Kugeln nahezu immer korrekt und schätzte ihre Größe mit nur wenigen Prozent Fehler, selbst aus unterschiedlichen Betrachtungsentfernungen. Indem die Kamera sich auf den Farbton, also die grundlegende Farbnuance, in jedem Pixel konzentrierte, konnte sie Rot- und Grüntöne unter konstanten Lichtverhältnissen zuverlässig unterscheiden, wobei feine Unterschiede zwischen ähnlichen roten Erdbeeren jedoch weiter eine Herausforderung darstellten.
Tastsinn, der fest von weich unterscheidet
Die Berührungs- und Biegesensoren ermöglichen der Roboterhand, Obst auf eine Weise zu ertasten, die ihr Sehen ergänzt. Wenn sich ein Finger krümmt, ändert sich das Licht in seiner eingebetteten Faser auf vorhersehbare Weise, sodass das System abschätzen kann, wie weit sich jeder Finger gebogen hat und wie schwer ein Objekt sein könnte. Beim Andrücken an Testproben von sehr weichem Gummi bis hin zu steifem Kunststoff zeigten die Fingerspitzen-Tastsensoren deutliche Änderungen der Lichtintensität, die die aufgebrachte Kraft widerspiegelten. So konnte der Greifer feste von weichen Objekten unterscheiden und anhand der Festigkeit zwischen unreifen und reifen Früchten differenzieren. In Demonstrationen griff der Roboter schonend Supermarkt-Erdbeeren und Avocados, maß deren Farbe und Größe und nutzte die kombinierten Daten, um reife von unreifen Proben ohne sichtbare Quetschstellen zu trennen. Ein eingebautes Drehmodul erlaubte der Hand sogar, um den Stiel zu rotieren und Gewächshaus-Erdbeeren von der Pflanze zu zupfen. 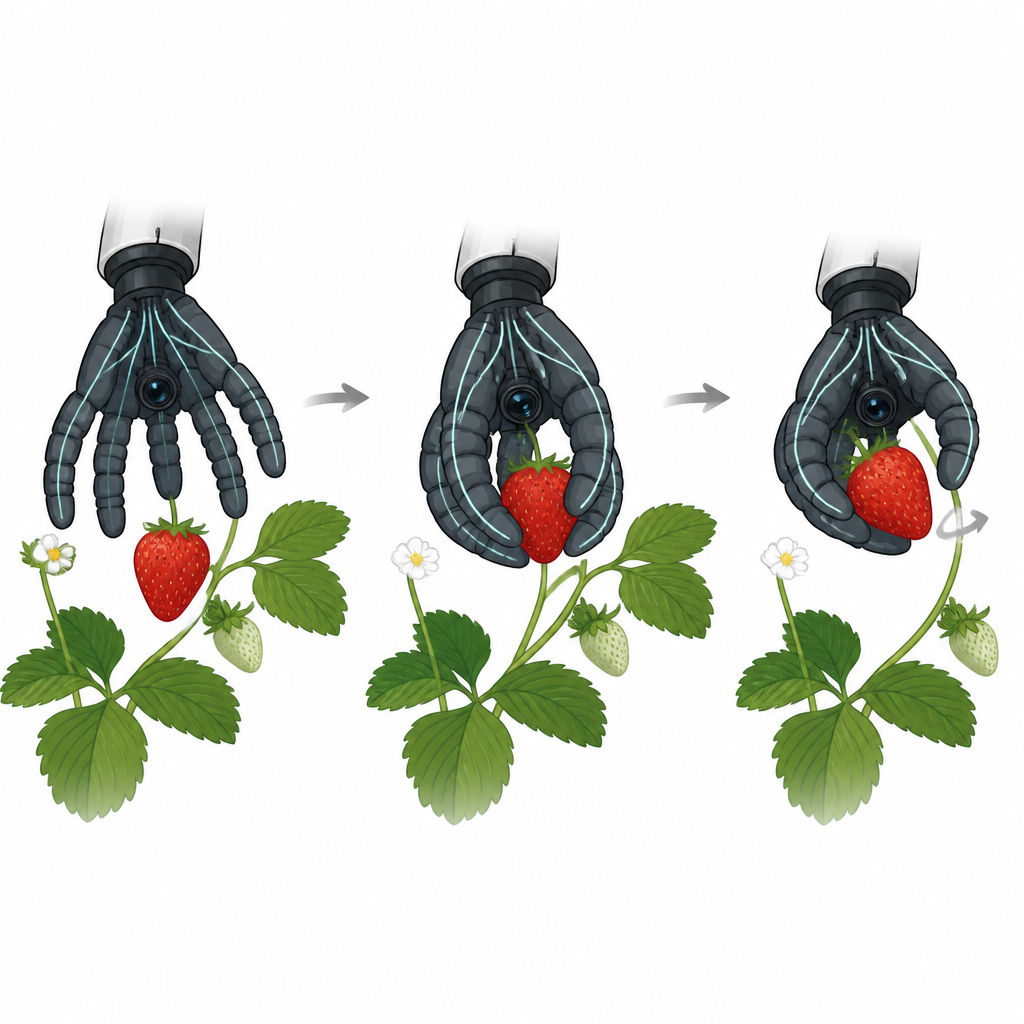
Vom Laborprototyp zum Helfer auf dem Bauernhof
Zusammen zeigen diese Fähigkeiten, dass ein einzelner weicher Greifer umfangreiche Informationen zu Farbe, Form, Größe und Festigkeit von Früchten sammeln kann, während er zugleich die Pflückbewegung ausführt. Für Erzeuger könnte ein solches Werkzeug genauere Entscheidungen darüber unterstützen, wann geerntet werden sollte, den Bedarf an manuellem Drücken und Sortieren verringern und Verluste durch beschädigte oder überreife Ware reduzieren. Obwohl das aktuelle System noch praktische Probleme hat, etwa komplexe Verkabelung und empfindliche Fasern, die durch Fruchtsaft verunreinigt werden können, weist es auf eine Zukunft hin, in der Roboter mit sanften, empfindenden Händen dazu beitragen, mehr unversehrtes, hochwertiges Obst vom Feld auf den Tisch zu bringen.
Zitation: Mishra, A.K., Ramaswami, A., Shree, V. et al. Sensor fusion of touch & vision in soft manipulators for fruit picking. Nat Commun 17, 4307 (2026). https://doi.org/10.1038/s41467-026-70588-9
Schlüsselwörter: weiche Robotik, Obsternte, taktile Sensorik, Computer Vision, präzise Landwirtschaft