Clear Sky Science · it
Fusione di sensori tattili e visivi in manipolatori morbidi per la raccolta della frutta
Robot delicati per frutti fragili
Chiunque abbia portato a casa fragole ammaccate sa quanto facilmente la frutta delicata possa danneggiarsi. Anche gli agricoltori affrontano lo stesso problema su scala massiccia, perdendo una gran parte del raccolto perché la frutta viene colta al momento sbagliato o maneggiata troppo energicamente. Questo studio introduce una mano robotica morbida e piena di sensori progettata per vedere e toccare la frutta come farebbe un raccoglitore umano, così da poter raccogliere colture come fragole e avocado in modo delicato, rapido e con molto meno spreco. 
Perché le mani morbide contano sul campo
Molti frutti offrono solo indizi sottili sulla maturazione. Alcuni, come gli agrumi, cambiano colore lentamente e restano sodi per settimane; altri, come le bacche, si ammorbidiscono rapidamente e possono deteriorarsi in pochi giorni. Il solo colore è spesso inaffidabile e la pressione manuale rischia di provocare ammaccature. I raccoglitori umani bilanciano da tempo ciò che vedono con ciò che percepiscono al tatto, ma oggi i coltivatori faticano con la carenza di manodopera e con la scala stessa delle ispezioni necessarie. I robot agricoli esistenti si affidano per lo più a pinze rigide in metallo e a telecamere piazzate lontano dalla frutta, il che rende difficile giudicare accuratamente colore, dimensione e consistenza e può comunque danneggiare i prodotti delicati.
Vedere e toccare in un’unica pinza compatta
I ricercatori hanno costruito una mano robotica a forma di stella con cinque dita morbide disposte attorno a un palmo centrale. Ogni dito è realizzato in materiale flessibile tipo gomma che si piega quando si inietta aria. Nascosti all’interno delle dita ci sono fibre di plastica trasparente che guidano la luce; le variazioni di quella luce rivelano quanto ogni dito si piega e quanto forte preme su un oggetto. Alle estremità delle dita, fibre a forma di U fungono da sensori tattili, indicando al sistema se sta tenendo qualcosa di morbido o di rigido. Nel palmo, una piccola videocamera e un sensore di distanza stanno affiancati, offrendo una vista ravvicinata di ogni frutto e misurando quanto esso appare grande. Il tutto è collegato con piccole schede elettroniche e un computer che combinano i segnali in un’unica rappresentazione di ciò che la pinza sta toccando e vedendo.
Come si comporta la mano morbida con la frutta
Per capire cosa potesse fare il dispositivo, il team ha prima misurato la meccanica della mano. Le dita morbide si piegano fino a circa due terzi di un cerchio completo, in accordo con le simulazioni al computer, e la pinza può chiudersi attorno a un oggetto in meno di due secondi. Può sollevare fino a un chilogrammo, più di sedici volte il proprio peso, e la sua apertura si estende da una piccola apertura centrale a un’area abbastanza ampia da racchiudere molti tipi di frutta. Il sistema visivo ha identificato correttamente forme semplici, come cubi e sfere, quasi sempre e ha stimato le loro dimensioni con un errore di pochi percentuali, anche a diverse distanze di osservazione. Concentrandosi sulla tinta, o tono cromatico di base, in ogni pixel, la videocamera è stata in grado di distinguere rosso e verde in modo affidabile con illuminazione fissa, sebbene rimangano difficili le differenze sottili tra fragole rosse molto simili.
Tatto che distingue il duro dal morbido
I sensori di tocco e di flessione permettono alla mano robotica di percepire la frutta in modi che completano la vista. Quando un dito si avvolge, la luce all’interno della fibra incorporata cambia in modo prevedibile, permettendo al sistema di dedurre quanto ogni dito si sia piegato e quanto potrebbe essere pesante un oggetto. Quando premuto contro campioni di prova che andavano dalla gomma molto morbida alla plastica rigida, i sensori tattici delle punte hanno mostrato variazioni distinte nell’intensità della luce che tracciavano la forza applicata. Questo ha permesso alla pinza di distinguere oggetti rigidi da oggetti morbidi e di percepire la differenza tra frutta acerba e matura in base alla consistenza. Nelle dimostrazioni, il robot ha afferrato delicatamente fragole e avocado da supermercato, ne ha misurato colore e dimensione e ha utilizzato i dati combinati per separare campioni maturi da non maturi senza ammaccature visibili. Un modulo integrato di torsione ha persino permesso alla mano di ruotare attorno al gambo per staccare le fragole in serra dalla pianta. 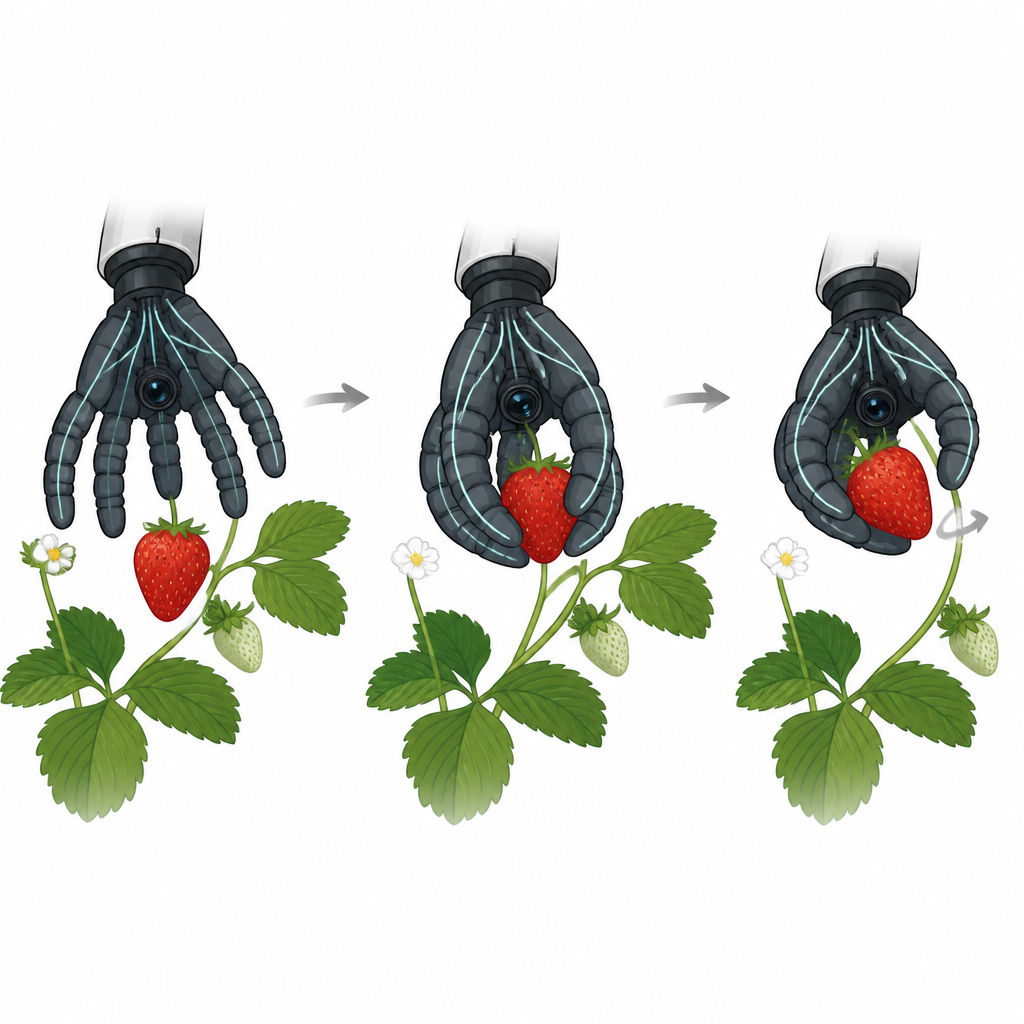
Dal prototipo di laboratorio al futuro aiutante in fattoria
Nel complesso, queste capacità dimostrano che una singola pinza morbida può raccogliere informazioni ricche su colore, forma, dimensione e consistenza della frutta svolgendo allo stesso tempo l’operazione di raccolta. Per i coltivatori, uno strumento del genere potrebbe supportare decisioni più accurate sul momento del raccolto, ridurre la necessità di spremitura e smistamento manuale e tagliare le perdite dovute a prodotti danneggiati o troppo maturi. Sebbene il sistema attuale affronti ancora problemi pratici, come cablaggi complessi e fibre delicate che possono essere inquinate dal succo della frutta, indica una direzione futura in cui robot con mani sensibili e delicate aiutano a portare più frutta integra e di alta qualità dal campo alla tavola.
Citazione: Mishra, A.K., Ramaswami, A., Shree, V. et al. Sensor fusion of touch & vision in soft manipulators for fruit picking. Nat Commun 17, 4307 (2026). https://doi.org/10.1038/s41467-026-70588-9
Parole chiave: robotica morbida, raccolta della frutta, sensibilità tattile, visione artificiale, agricoltura di precisione