Clear Sky Science · es
Fusión de sensores de tacto y visión en manipuladores blandos para la recolección de fruta
Robots delicados para fruta frágil
Cualquiera que haya llevado a casa fresas magulladas sabe lo fácilmente que se puede dañar la fruta delicada. Los agricultores enfrentan el mismo problema a gran escala, perdiendo una parte considerable de la cosecha porque la fruta se recoge en el momento inadecuado o se manipula con demasiada brusquedad. Este estudio presenta una mano robótica blanda y llena de sensores diseñada para ver y sentir la fruta como lo hace un recolector humano, de modo que pueda cosechar cultivos como fresas y aguacates con suavidad, rapidez y con mucho menos desperdicio. 
Por qué las manos blandas importan en el campo
Muchas frutas sólo ofrecen pistas sutiles sobre su madurez. Algunas, como los cítricos, cambian de color lentamente y se mantienen firmes durante semanas; otras, como las bayas, se ablandan rápidamente y pueden echarse a perder en días. El color por sí solo suele ser poco fiable, y apretar con la mano corre el riesgo de producir magulladuras. Los recolectores humanos llevan tiempo equilibrando lo que ven con lo que sienten, pero los productores ahora luchan con la escasez de mano de obra y la enorme escala de inspección necesaria. Los robots agrícolas actuales dependen en su mayoría de pinzas metálicas rígidas y cámaras colocadas lejos de la fruta, lo que dificulta juzgar con precisión el color, tamaño y firmeza, y puede seguir dañando los productos delicados.
Ver y sentir en una sola pinza compacta
Los investigadores construyeron una mano robótica en forma de estrella con cinco dedos blandos dispuestos alrededor de una palma central. Cada dedo está hecho de un material flexible similar al caucho que se dobla cuando se bombea aire en su interior. Ocultas dentro de los dedos hay fibras de plástico transparente que guían la luz; los cambios en esa luz revelan cuánto se dobla cada dedo y cuánta presión ejerce sobre un objeto. En las yemas, fibras en forma de U actúan como sensores táctiles, informando al sistema si sostiene algo blando o firme. En la palma, una pequeña cámara y un sensor de distancia se sitúan uno al lado del otro, ofreciendo una vista detallada de cada fruto y midiendo el tamaño aparente. Todo esto se integra con pequeñas placas de circuito y un ordenador que combinan las señales en una única imagen de lo que la pinza está tocando y viendo.
Cómo se comporta la mano blanda con la fruta
Para entender lo que su dispositivo podía hacer, el equipo primero midió la mecánica de la mano. Los dedos blandos se doblan hasta aproximadamente dos tercios de un círculo completo coincidiendo con las simulaciones por ordenador, y la pinza puede cerrarse alrededor de objetos en menos de dos segundos. Puede levantar hasta un kilogramo, más de dieciséis veces su propio peso, y su alcance se amplía desde una pequeña abertura central hasta un área lo bastante grande como para encerrar muchos tipos de fruta. El sistema de visión identificó correctamente formas simples, como cubos y esferas, casi siempre y estimó su tamaño con solo unos pocos por ciento de error, incluso a distintas distancias de visión. Al centrarse en el matiz, o tono básico de color, de cada píxel, la cámara pudo distinguir rojos y verdes de forma fiable bajo iluminación fija, aunque las diferencias sutiles entre fresas rojas similares siguieron siendo un reto.
Tacto que distingue firme de blando
Los sensores de tacto y de flexión permiten que la mano robótica sienta la fruta de maneras que complementan su vista. A medida que un dedo se curva, la luz dentro de su fibra integrada cambia de forma predecible, lo que permite al sistema inferir cuánto se ha doblado cada dedo y cuán pesado puede ser un objeto. Al presionar muestras de prueba que iban desde caucho muy blando hasta plástico rígido, los sensores táctiles de la yema mostraron cambios distintivos en la intensidad de la luz que seguían la fuerza aplicada. Esto permitió a la pinza distinguir objetos rígidos de blandos y detectar la diferencia entre fruta inmadura y madura en función de la firmeza. En demostraciones, el robot agarró con suavidad fresas y aguacates de supermercado, midió su color y tamaño, y usó los datos combinados para separar muestras maduras de inmaduras sin magulladuras visibles. Un módulo de torsión integrado incluso permitió a la mano girar alrededor del tallo para desprender fresas de invernadero de la planta. 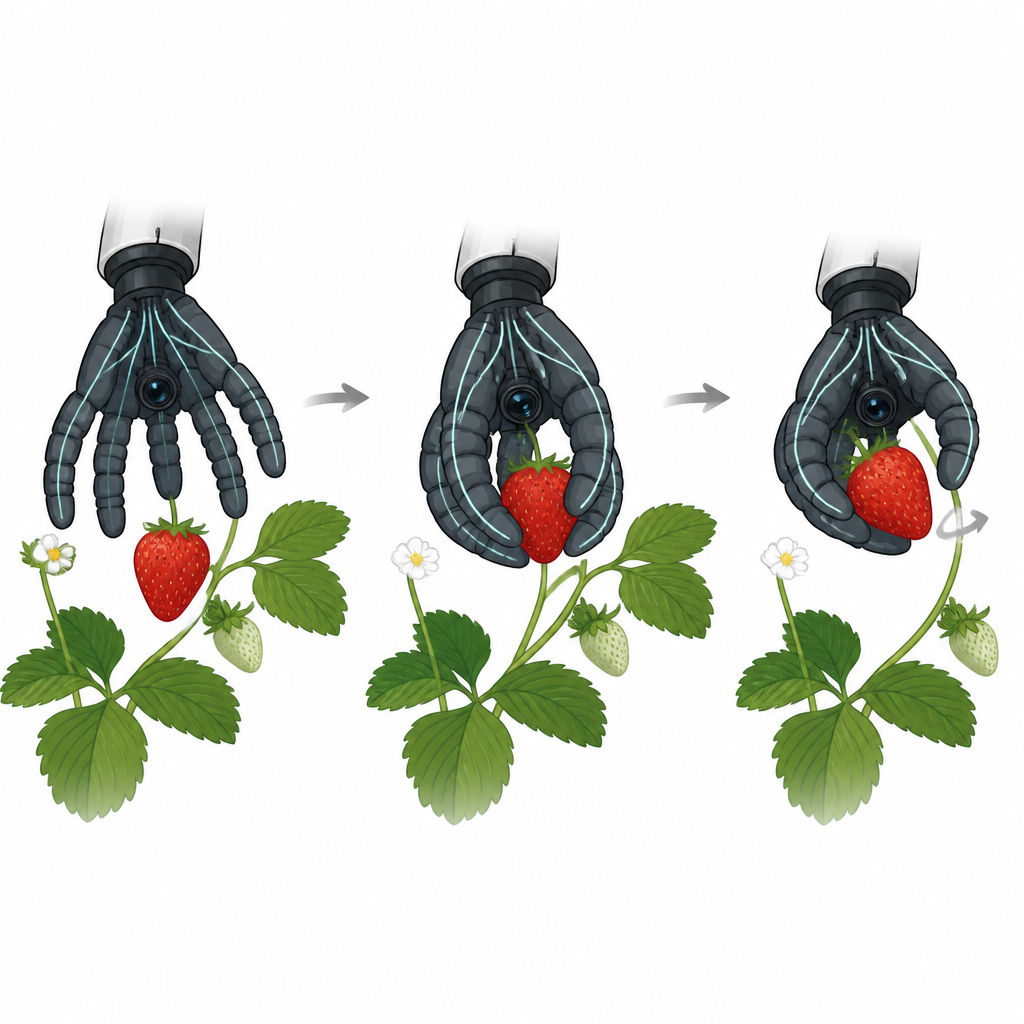
Del prototipo de laboratorio al ayudante agrícola del futuro
En conjunto, estas capacidades muestran que una sola pinza blanda puede reunir información rica sobre el color, forma, tamaño y firmeza de la fruta mientras realiza la propia recolección. Para los productores, una herramienta así podría apoyar decisiones más precisas sobre cuándo cosechar, reducir la necesidad de apretar y clasificar manualmente, y disminuir las pérdidas por productos dañados o sobremaduros. Aunque el sistema actual aún afronta problemas prácticos, como cableado complejo y fibras delicadas que pueden ensuciarse con jugo de fruta, apunta hacia un futuro en el que robots con manos sensibles y delicadas ayuden a llevar más fruta intacta y de alta calidad del campo a la mesa.
Cita: Mishra, A.K., Ramaswami, A., Shree, V. et al. Sensor fusion of touch & vision in soft manipulators for fruit picking. Nat Commun 17, 4307 (2026). https://doi.org/10.1038/s41467-026-70588-9
Palabras clave: robótica blanda, cosecha de frutas, detección táctil, visión por ordenador, agricultura de precisión