Clear Sky Science · ja
果実収穫のためのソフトマニピュレータにおける触覚と視覚のセンサー融合
壊れやすい果実のためのやさしいロボット
家庭でイチゴがつぶれて持ち帰った経験がある人は、繊細な果実がどれほど簡単に傷つくかを知っています。農家は同じ問題に大規模に直面しており、果実が適切な時期に摘まれなかったり扱いが粗かったりして収穫の大部分を失うことがあります。本研究は、人間の収穫者のように果実を見て触れることができる、センサーを備えたソフトなロボットハンドを紹介します。これによりイチゴやアボカドのような作物をやさしく、迅速に、廃棄を大幅に減らして収穫できます。 
現場でソフトハンドが重要な理由
多くの果実は熟度についてわずかな手がかりしか示しません。柑橘類のように色がゆっくり変わり硬さが長く保たれるものもあれば、ベリー類のように急速に柔らかくなり数日で傷みやすいものもあります。色だけでは信頼できないことが多く、手で押すと傷がつくリスクがあります。人間の摘み手は長年、視覚と触覚を組み合わせて判断してきましたが、現在は人手不足と検査規模の大きさに悩まされています。既存の農業用ロボットは主に剛性の高い金属グリッパーと果実から離れた場所に置かれたカメラに依存しており、色、サイズ、硬さを正確に判断しづらく、繊細な農産物を傷つけることがあります。
視覚と触覚を一体化したコンパクトなグリッパー
研究チームは、中心のパームを囲むように5本のソフトフィンガーを持つ星形のロボットハンドを構築しました。各指は空気を注入すると曲がる柔軟なゴム状素材でできています。指の内部には光を導く透明なプラスチックファイバーが埋め込まれており、その光の変化から各指の曲がり具合や押圧の強さがわかります。指先にはU字型のファイバーが触覚センサーとして働き、つかんでいるものが柔らかいか硬いかを伝えます。パーム部には小型カメラと距離センサーが並んで配置され、果実のクローズアップ画像と見かけの大きさを測ります。これらは小さな基板とコンピュータで結び付けられ、グリッパーが見て触れているものを統合した単一の情報として扱います。
果実に対するソフトハンドの性能
デバイスの能力を評価するため、まずチームはハンドの力学特性を測定しました。ソフトフィンガーは全円の約3分の2まで曲がり、コンピュータシミュレーションと一致しました。グリッパーは2秒以内で閉じることができ、最大1キログラムまで持ち上げられ、自重の16倍以上の荷重を扱えます。届く範囲は中央の小さな開口から多種の果実を包める十分な領域まで拡がります。ビジョンシステムは立方体や球などの単純な形状をほぼ常に正確に認識し、異なる撮影距離でもサイズを数パーセントの誤差で推定しました。ピクセルごとの色相、つまり基本的な色調に着目することで、固定照明下では赤と緑を信頼性高く識別できましたが、類似した赤のイチゴ同士の微妙な違いの識別は依然として難しい点が残りました。
硬さを区別する触覚
触覚と曲げセンサーにより、ロボットハンドは視覚を補う方法で果実を感じられます。指が曲がると埋め込んだファイバー内の光が予測可能に変化し、その変化から各指がどの程度曲がったか、物体の重さがどのくらいかを推定できます。非常に柔らかいゴムから硬いプラスチックまでの試料に押し当てると、指先の触覚センサーは加えられた力に応じて光強度が明確に変化しました。これにより、グリッパーは硬い物体と柔らかい物体を識別でき、硬さに基づいて未熟と熟した果実を区別することが可能になりました。デモでは、ロボットはスーパーマーケットのイチゴやアボカドをやさしく把持し、色とサイズを計測し、これらのデータを組み合わせて目に見える傷をつけることなく熟と未熟を分けました。組み込みのねじりモジュールは、果実の茎の周りで手を回転させて温室のイチゴを植物から摘むことさえ可能にしました。 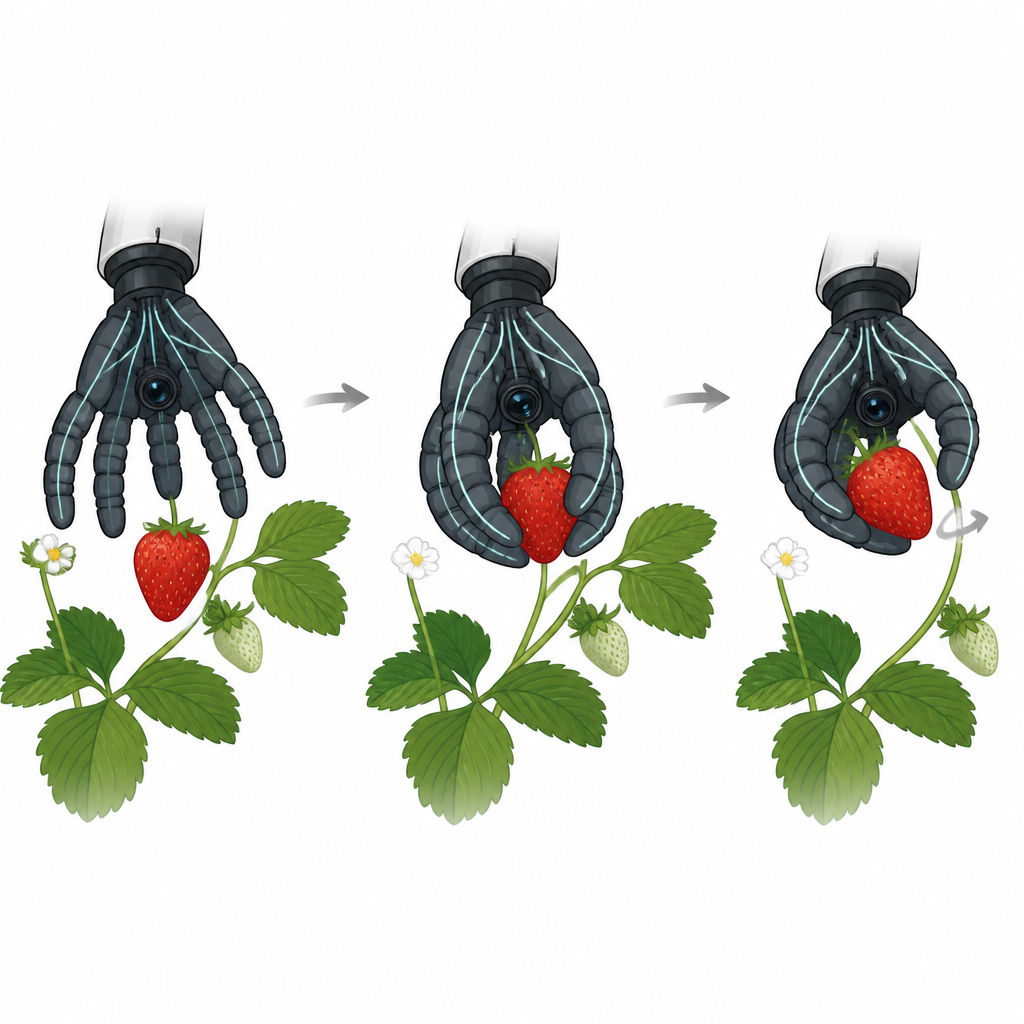
試作ラボから将来の農場助手へ
これらの能力は、単一のソフトグリッパーが色、形、サイズ、硬さについて豊富な情報を収集しつつ、収穫作業自体も行えることを示しています。栽培者にとって、このようなツールは収穫時期の判断をより正確にし、手作業による押しつぶしや選別の必要性を減らし、傷みや過熟による損失を削減する助けになります。現在のシステムは複雑な配線や果汁で汚れやすい繊細なファイバーといった実用上の課題に直面していますが、やさしく感知できる手を持つロボットが畑から食卓へより良い状態の高品質な果実を運ぶ未来を指し示しています。
引用: Mishra, A.K., Ramaswami, A., Shree, V. et al. Sensor fusion of touch & vision in soft manipulators for fruit picking. Nat Commun 17, 4307 (2026). https://doi.org/10.1038/s41467-026-70588-9
キーワード: ソフトロボティクス, 果実収穫, 触覚センシング, コンピュータビジョン, 精密農業