Clear Sky Science · tr
Yumuşak manipülatörlerde dokunma ve görsellik sensör füzyonu ile meyve toplama
Kırılgan meyveler için nazik robotlar
Eve getirdiğinizde ezilmiş çilekleri görmüş olan herkes, hassas meyvelerin ne kadar kolay zarar görebileceğini bilir. Çiftçiler de aynı sorunla çok daha büyük ölçeklerde karşılaşıyor; uygun olmayan zamanda toplama ya da sert muamele nedeniyle hasadın büyük bir kısmını kaybediyorlar. Bu çalışma, insan toplayıcının yaptığı gibi meyveyi görüp hissedebilen, böylece çilek ve avokado gibi ürünleri nazikçe, hızlıca ve çok daha az israfla hasat edebilen sensör dolu yumuşak bir robot el tanıtıyor. 
Tarla için neden yumuşak eller önemlidir
Pek çok meyve olgunluk hakkında yalnızca ince ipuçları verir. Narenciye gibi bazıları renk değiştirmede yavaştır ve haftalarca sert kalır; diğerleri, örneğin çilekler, hızla yumuşar ve günler içinde bozulabilir. Sadece renge bakmak çoğu zaman güvenilir değildir ve elle bastırmak ezilmeye yol açabilir. İnsan toplayıcılar uzun süredir gördükleriyle hissettiklerini dengeliyor, ancak üreticiler artık işgücü eksikliği ve gereken denetim ölçeği ile boğuşuyor. Mevcut tarım robotlarının çoğu sert metal kıskaçlar ve meyveden uzakta yerleştirilmiş kameralara dayanıyor; bu da renk, boyut ve sertliği doğru değerlendirmeyi zorlaştırıyor ve hassas ürünleri hâlâ zarar verebiliyor.
Bir arada görme ve hissetme: kompakt bir kepçede
Araştırmacılar, merkezî bir avuç etrafında beş yumuşak parmakla düzenlenmiş yıldız şeklinde bir robot el geliştirdi. Her parmak, içine hava verildiğinde bükülen kauçuk benzeri esnek bir malzemeden yapıldı. Parmakların içinde gizli şeffaf plastik fiberler ışığı yönlendirir; bu ışığındaki değişimler her parmağın ne kadar büküldüğünü ve nesneye ne kadar bastığını ortaya koyar. Uç kısımlarda, U şeklindeki fiberler dokunma sensörleri olarak görev yapar; sistemin yumuşak mı yoksa sert mi tuttuğunu bildirir. Avuçta, küçük bir kamera ve bir uzaklık sensörü yan yana durarak her meyvenin yakın çekimini sağlar ve ne kadar büyük göründüğünü ölçer. Tüm bunlar küçük devre kartları ve sinyalleri dokunma ve görme bilgisine dönüştüren bir bilgisayarla birleştirilir.
Yumuşak elin meyve üzerindeki performansı
Cihazlarının neler yapabileceğini anlamak için ekip önce elin mekaniğini ölçtü. Yumuşak parmaklar yaklaşık olarak tam dairenin üçte ikisine kadar bükülüyor ve bilgisayar simülasyonlarıyla uyum gösteriyor; kepçe iki saniyenin altında nesnelerin etrafını kapatabiliyor. Kendi ağırlığının on altı katından fazlası olan bir kilogram kadar kaldırabiliyor ve erişimi küçük merkezî açıklıktan birçok meyveyi çevreleyecek büyüklüğe kadar genişliyor. Görüntüleme sistemi küp ve küre gibi basit şekilleri neredeyse her seferinde doğru tanımladı ve farklı görüntüleme mesafelerinde boyutlarını yalnızca birkaç yüzde hata ile tahmin etti. Piksel başına temel renk tonu (hue) üzerine odaklanarak kamera, sabit aydınlatma altında kırmızılar ile yeşilleri güvenilir biçimde ayırt edebildi; ancak benzer kırmızı çilekler arasındaki ince farklar hâlâ zorluydu.
Sert ile yumuşuğu ayırt eden dokunma
Dokunma ve bükülme sensörleri robot elin görmesini tamamlayacak şekilde meyveyi hissetmesini sağladı. Bir parmak kıvrıldıkça içinde gömülü fiberdeki ışık öngörülebilir bir şekilde değişir; bu da sistemin her parmağın ne kadar büküldüğünü ve bir nesnenin ne kadar ağır olabileceğini çıkarmasına olanak tanır. Çok yumuşak kauçuktan sert plastiğe kadar uzanan test örneklerine bastırıldığında, uçtaki dokunma sensörleri uygulanan kuvvetle izlenen ışık yoğunluğunda belirgin değişimler gösterdi. Bu, kepçenin sert nesneleri yumuşak olanlardan ayırt etmesini ve sertliğe dayalı olarak olgun olmayan ile olgun meyve arasındaki farkı hissetmesini sağladı. Gösterimlerde robot, market çileklerini ve avokadoları nazikçe kavradı, renklerini ve boyutlarını ölçtü ve birleşik veriyi kullanarak görünür ezik olmadan olgun olanları olgun olmayanlardan ayırdı. Yerleşik bir döndürme modülü bile elin meyvenin sapı etrafında dönerek seradaki çilekleri bitkiden koparmasına izin verdi. 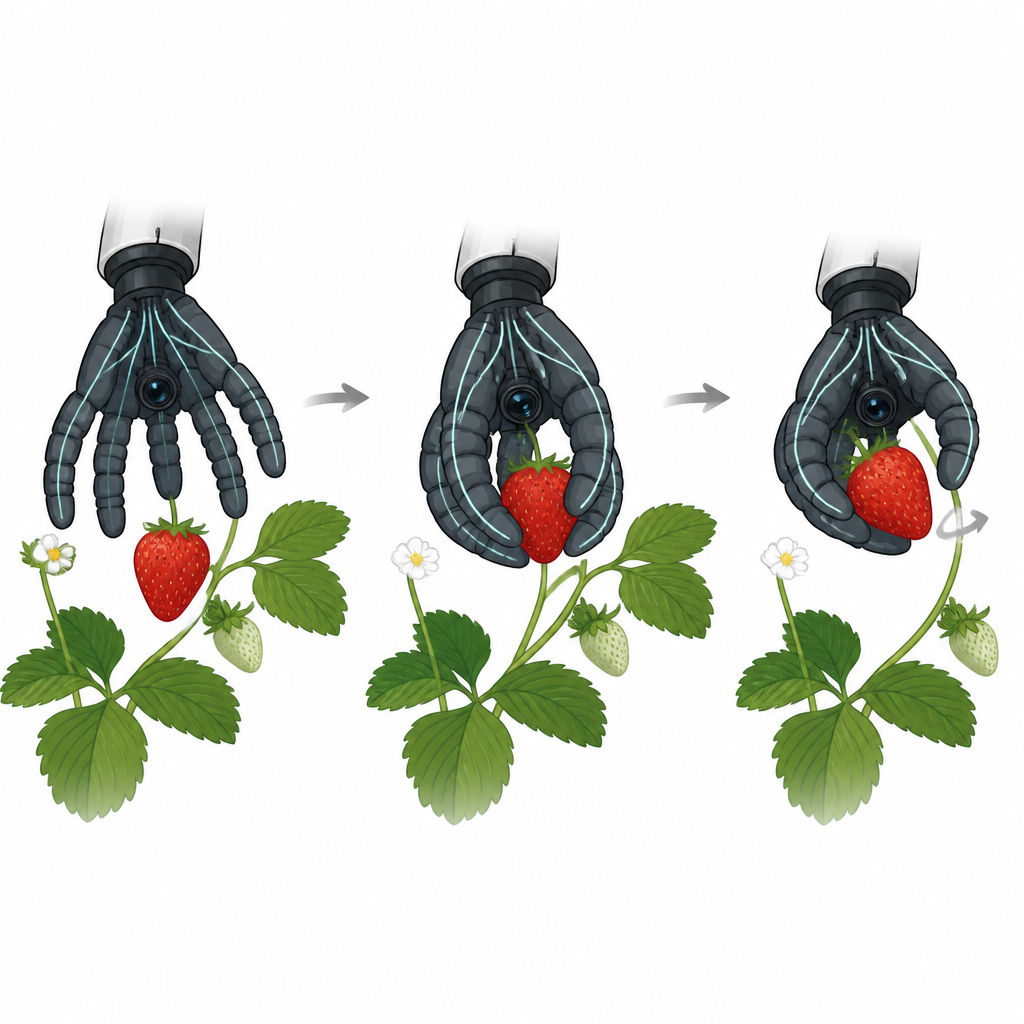
Laboratuvar prototipinden geleceğin tarım yardımcısına
Bu yetenekler bir araya geldiğinde tek bir yumuşak kepçenin meyvenin renk, şekil, boyut ve sertliği hakkında zengin bilgiler toplayabileceğini ve aynı zamanda toplama işini de yapabileceğini gösteriyor. Üreticiler için böyle bir araç, ne zaman hasat yapılacağına dair daha doğru kararları destekleyebilir, elle sıkma ve ayırma ihtiyacını azaltabilir ve zarar görmüş veya fazla olgun ürünlerden kaynaklanan kayıpları düşürebilir. Mevcut sistem hâlâ karmaşık kablolama ve meyve suyu tarafından kirlenebilen hassas fiberler gibi pratik sorunlarla karşılaşsa da, nazik, algılayıcı ellere sahip robotların tarladan sofraya daha sağlam, yüksek kaliteli meyve getirmeye yardımcı olacağı bir geleceğe işaret ediyor.
Atıf: Mishra, A.K., Ramaswami, A., Shree, V. et al. Sensor fusion of touch & vision in soft manipulators for fruit picking. Nat Commun 17, 4307 (2026). https://doi.org/10.1038/s41467-026-70588-9
Anahtar kelimeler: yumuşak robotik, meyve hasadı, dokunsal algılama, bilgisayarla görme, kesin tarım