Clear Sky Science · he
מיזוג חישה של מגע וראייה במניפולטורים רכים לבחיית פירות
רובוטים עדינים לפירות שבירים
כל מי שהביא הביתה תותים מכואבים יודע כמה פירות עדינים עלולים להיפגע בקלות. חקלאים מתמודדים עם אותו הבעיה בקנה מידה גדול, ומאבדים חלק גדול מהתוצרת בגלל קטיפה בזמן לא נכון או טיפול גס מדי. המחקר הזה מציג כף רובוטית רכה ומלאת חיישנים שתוכננה לראות ולהרגיש פירות כמו קטיף אנושי, כך שהיא יכולה לקטוף יבולים כמו תותים ואבוקדו בעדינות, במהירות ובפחות בזבוז. 
למה כפות רכות חשובות בשדה
רבים מהפירות נותנים רמזים עדינים בלבד לגבי בשלותם. יש כאלה, כמו הדרים, שמשנים צבע באיטיות ונשארים קשים למשך שבועות; אחרים, כמו פירות יער, מתרככים במהירות ועלולים להתקלקל בתוך ימים. הצבע לבדו אינו מהימן לעתים קרובות, ולחיצה ביד עלולה לגרום לחבורות. קטיפים אנושיים מאזנים כבר זמן רב בין מה שהם רואים למה שהם מרגישים, אך מגדלים כיום מתמודדים עם חוסרים בכוח אדם והיקף בדיקה עצום. רובוטים חקלאיים קיימים נשענים ברובם על מלחצים מתכתיים קשיחים ומצלמות הממוקמות רחוק מהפרי, מה שמקשה על הערכת צבע, גודל וקושי בצורה מדויקת ועדיין עלול לפגוע בתוצרת עדינה.
ראייה ומישוש באחיזה קומפקטית אחת
החוקרים בנו כף בצורת כוכב עם חמישה אצבעות רכות המחוברות סביב כף מרכזית. כל אצבע עשויה חומר גמיש בדומה לגומי המתעקם כאשר מנפחים אוויר לתוכה. בתוך האצבעות מוחדרים סיבים פלסטיים שקופים שמוליכים אור; שינויים באור זה מגלים עד כמה כל אצבע מתעקמת וכמה היא לוחצת על עצם. בקצות האצבעות, סיבים בצורת U פועלים כחיישני מגע ומדווחים למערכת האם היא מחזיקה משהו רך או קשה. בכף נמצאים מצלמה זעירה וחיישן מרחק זה לצד זה, שנותנים תצוגה מקרוב של כל פרי ומודדים כמה גדול הוא נראה. כל זה מחובר ללוחות מעגלים קטנים ולמחשב שמאחד את האותות לתמונה אחת של מה שהמניפולטור נוגע בו ורואה.
כיצד הכף הרכה מתפקדת על פירות
כדי להבין מה המכשיר יכול לעשות, הצוות מדד תחילה את המכניקה של הכף. האצבעות הרכות מתעקמות עד לכ־שתי שלישים ממעגל מלא תוך התאמה לדגמי מחשב, והממلاח יכולה להיסגר סביב עצמים פחות משתי שניות. היא יכולה להרים עד קילוגרם אחד, יותר משש עשרה פעמים ממשקל גופה, והטווח שלה מתרחב מפתח מרכזי קטן לאזור שיכול להכיל סוגים רבים של פירות. מערכת הראייה זיהתה נכונה צורות פשוטות, כגון קוביות וכדורים, כמעט בכל מקרה ואומדה את גודלן עם טעות של מעט אחוזים בלבד, אפילו במרחקי תצפית שונים. על ידי התמקדות בצבע הבסיסי (גוון) בכל פיקסל, המצלמה הצליחה להבדיל בין אדומים לירוקים באופן מהימן בתאורת קבועה, אם כי הבדלים עדינים בין תותים אדומים דומים נותרו מאתימים.
מגע שמבדיל בין קשה לרך
חיישני המגע והעקום מאפשרים לכף הרובוטית להרגיש פירות בדרכים שמשלימות את הראייה שלה. ככל שאצבע מתכופפת, האור בתוך הסיב המוטמן משתנה בצורה צפויה, מה שמאפשר למערכת להסיק עד כמה כל אצבע התכופפה וכמה כבד עשוי להיות העצם. כאשר לוחצים על דגימות מבחן הנעות מגומי רך מאוד ועד פלסטיק קשיח, חיישני המגע בקצה האצבע הראו שינויים מובחנים בעוצמת האור שעקבו אחרי מידת הכוח שהופעל. הדבר אפשר למניפולטור להבדיל בין עצמים קשים לרכים ולחוש את ההבדל בין פרי לא בשל לפרי בשל על סמך הקשיחות. בהדגמות, הרובוט אחז בעדינות בתותים ובאבוקדואים מרשתות סופרמרקט, מדד את צבעם וגודלם, והשתמש בנתונים המשולבים להפריד בין דגימות בושלות ללא חבורות נראות. מודול סיבוב מובנה אפילו איפשר לכף להסתובב סביב גבעול הפרי כדי לקטוף תותים חמממתיים מהצמח. 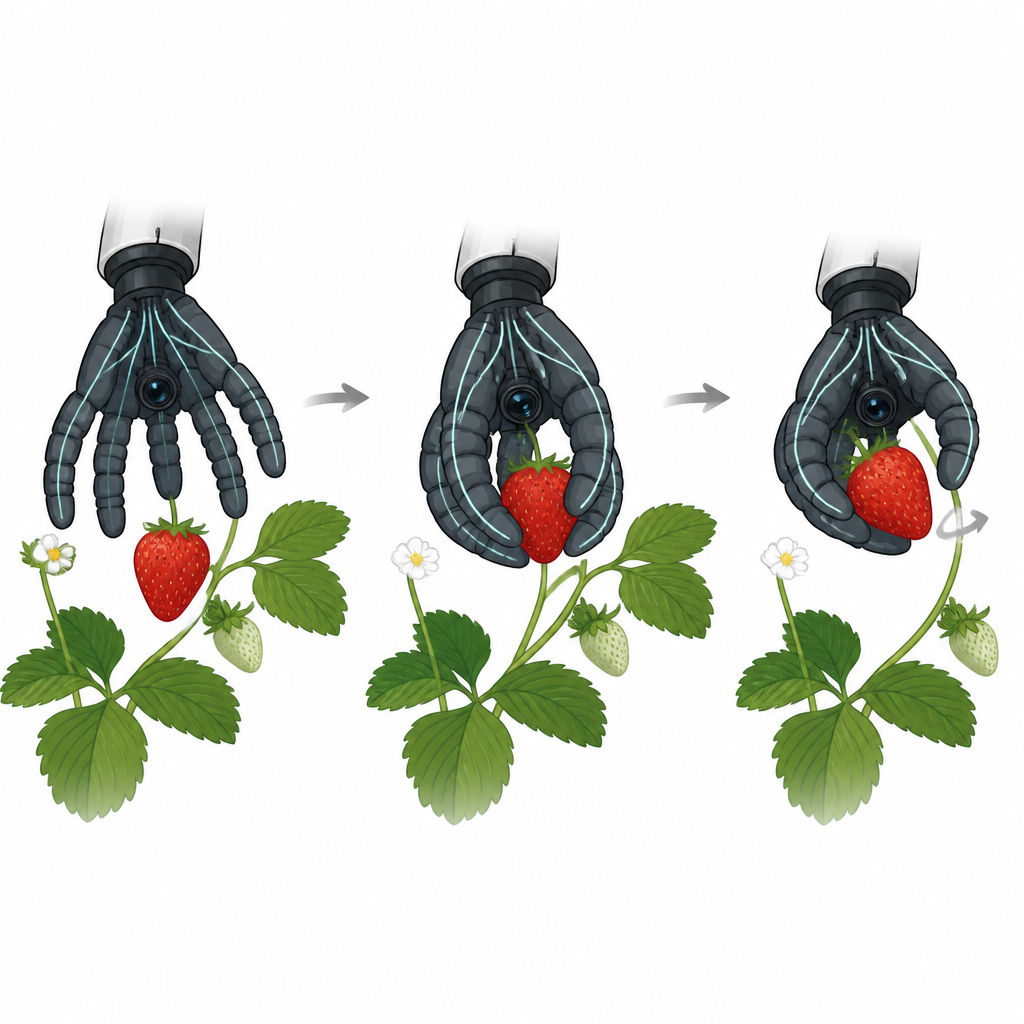
מתצורת אב־טיפוס למעזר חקלאי עתידי
ביחד, היכולות הללו מראות שכף רכה יחידה יכולה לאסוף מידע עשיר על צבע, צורה, גודל וקשיחות של פרי ובו־בזמן לבצע את פעולת הקטיף עצמה. עבור מגדלים, כלי כזה יכול לתמוך בקבלת החלטות מדויקת יותר לגבי מועד הקטיף, להפחית את הצורך בסחיטה ומיון ידני ולצמצם אבידות מתוצרת פגומה או בושלה מדי. למרות שהמערכת הנוכחית עדיין מתמודדת עם בעיות מעשיות, כגון חיווט מורכב וסיבים עדינים שעלולים להיקרע ממיצי פרי, היא מצביעה על עתיד שבו רובוטים עם כפות חושיות ועדינות יעזרו להביא יותר פירות שלמים ואיכותיים מהשדה לשולחן.
ציטוט: Mishra, A.K., Ramaswami, A., Shree, V. et al. Sensor fusion of touch & vision in soft manipulators for fruit picking. Nat Commun 17, 4307 (2026). https://doi.org/10.1038/s41467-026-70588-9
מילות מפתח: רובוטיקה רכה, קטיף פירות, חישה מישושית, ראיית מכונה, חקלאות מדויקת