Clear Sky Science · pt
Fusão sensorial de toque e visão em manipuladores macios para colheita de frutas
Robôs delicados para frutas frágeis
Quem já levou para casa morangos amassados sabe o quão facilmente frutas delicadas podem ser danificadas. Os agricultores enfrentam o mesmo problema em escala massiva, perdendo grande parte da colheita porque a fruta é colhida no momento errado ou manipulada com muita força. Este estudo apresenta uma mão robótica macia e repleta de sensores projetada para ver e sentir a fruta como um coletor humano, permitindo colher culturas como morangos e abacates com suavidade, rapidez e muito menos desperdício. 
Por que mãos macias importam no campo
Muitas frutas oferecem apenas pistas sutis sobre a maturação. Algumas, como os cítricos, mudam de cor lentamente e permanecem firmes por semanas; outras, como as berries, amolecem rapidamente e podem estragar em dias. A cor sozinha costuma ser pouco confiável, e apertar com a mão corre o risco de causar manchas. Colhedores humanos há muito equilibram o que veem com o que sentem, mas os produtores agora enfrentam escassez de mão de obra e a enorme escala de inspeção necessária. Robôs agrícolas existentes dependem em grande parte de garras metálicas rígidas e de câmeras posicionadas longe da fruta, o que dificulta julgar com precisão cor, tamanho e firmeza e ainda pode ferir produtos delicados.
Ver e sentir em uma única pinça compacta
Os pesquisadores construíram uma mão robótica em forma de estrela com cinco dedos macios dispostos ao redor de uma palma central. Cada dedo é feito de um material flexível semelhante à borracha que se dobra quando ar é bombeado para dentro. Escondidas dentro dos dedos há fibras plásticas transparentes que guiam a luz; mudanças nessa luz revelam quanto cada dedo se dobra e com que força pressiona um objeto. Nas pontas dos dedos, fibras em forma de U atuam como sensores táteis, indicando ao sistema se está segurando algo macio ou firme. Na palma, uma pequena câmera e um sensor de distância ficam lado a lado, oferecendo uma visão de perto de cada fruta e medindo o quanto ela aparenta ser grande. Tudo isso é conectado por pequenas placas de circuito e um computador que combinam os sinais em um retrato unificado do que a pinça está tocando e vendo.
Como a mão macia se sai com frutas
Para entender o que o dispositivo podia fazer, a equipe primeiro mediu a mecânica da mão. Os dedos macios se curvam até cerca de dois terços de um círculo completo enquanto correspondem às simulações de computador, e a pinça consegue fechar ao redor de objetos em menos de dois segundos. Ela pode levantar até um quilograma, mais de dezesseis vezes seu próprio peso, e seu alcance se expande de uma pequena abertura central para uma área grande o suficiente para envolver muitos tipos de fruta. O sistema de visão identificou corretamente formas simples, como cubos e esferas, quase sempre, e estimou seu tamanho com apenas alguns por cento de erro, mesmo a diferentes distâncias de visualização. Ao focar na matiz, ou tom básico de cor, em cada pixel, a câmera pôde distinguir vermelhos e verdes de forma confiável sob iluminação fixa, embora diferenças sutis entre morangos vermelhos semelhantes continuassem desafiadoras.
Toque que distingue firme de macio
Os sensores de toque e de curvatura permitem que a mão robótica sinta a fruta de maneiras que complementam sua visão. À medida que um dedo se enrola, a luz dentro de sua fibra embutida muda de maneira previsível, permitindo ao sistema inferir o quanto cada dedo se dobrou e quão pesado o objeto pode ser. Quando pressionados contra amostras de teste que variavam de borracha muito macia a plástico rígido, os sensores táteis nas pontas mostraram mudanças distintas na intensidade luminosa que acompanharam a força aplicada. Isso permitiu que a pinça distinguisse objetos rígidos de macios e percebesse a diferença entre fruta verde e madura com base na firmeza. Em demonstrações, o robô segurou suavemente morangos e abacates de supermercado, mediu sua cor e tamanho e usou os dados combinados para separar amostras maduras das verdes sem causar amassados visíveis. Um módulo de torção embutido até permitiu que a mão girasse ao redor do caule para destacar morangos cultivados em estufa da planta. 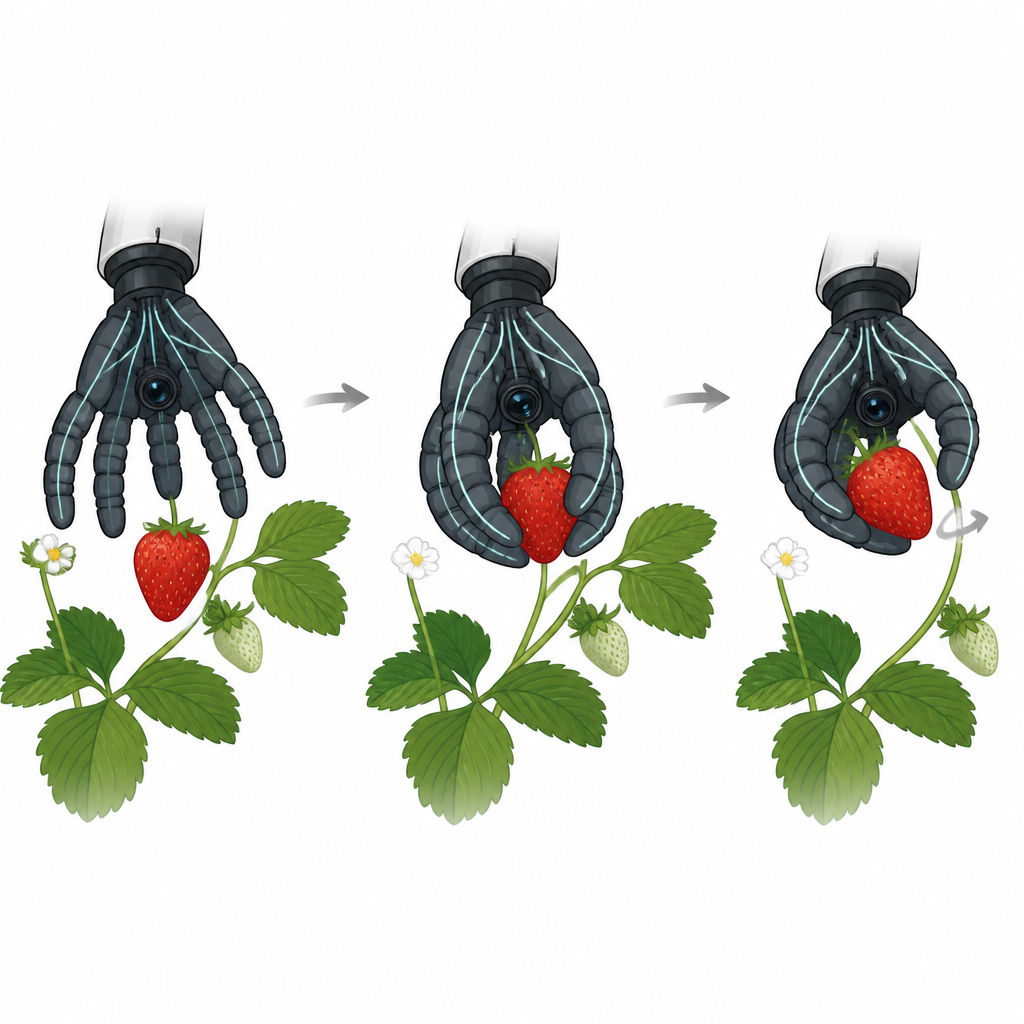
Do protótipo de laboratório ao ajudante agrícola do futuro
Juntas, essas habilidades mostram que uma única pinça macia pode reunir informações ricas sobre cor, forma, tamanho e firmeza da fruta enquanto também realiza a colheita. Para os produtores, uma ferramenta como essa pode apoiar decisões mais precisas sobre quando colher, reduzir a necessidade de apertos e triagens manuais e diminuir perdas por produtos danificados ou sobremaduros. Embora o sistema atual ainda enfrente questões práticas, como fiação complexa e fibras delicadas que podem ser contaminadas por suco de fruta, ele aponta para um futuro em que robôs com mãos sensíveis e gentis ajudam a levar mais frutas intactas e de alta qualidade do campo à mesa.
Citação: Mishra, A.K., Ramaswami, A., Shree, V. et al. Sensor fusion of touch & vision in soft manipulators for fruit picking. Nat Commun 17, 4307 (2026). https://doi.org/10.1038/s41467-026-70588-9
Palavras-chave: robótica macia, colheita de frutas, sensoriamento táctil, visão computacional, agricultura de precisão