Clear Sky Science · ar
دمج مستشعرات اللمس والبصر في محركات لينة لقطف الفاكهة
روبوتات رقيقة للفاكهة الحساسة
أي شخص أحضر إلى البيت فراولة بها كدمات يعرف مدى سهولة تلف الفواكه الرقيقة. يواجه المزارعون نفس المشكلة بمقياس ضخم، حيث يخسرون جزءًا كبيرًا من المحصول لأن الفاكهة تُقطف في الوقت الخطأ أو تُعالج بخشونة. تُقدّم هذه الدراسة يدًا روبوتية ناعمة ومزدانة بالمستشعرات مصممة لترى وتحس بالفاكهة كما يفعل القاصد البشري، بحيث يمكنها حصاد محاصيل مثل الفراولة والأفوكادو بلطف وسرعة وبهدر أقل بكثير. 
لماذا تهم الأيدي الناعمة في الحقل
تعطي العديد من الفواكه إشارات دقيقة فقط عن النضج. بعضها، مثل الحمضيات، يغيّر لونه ببطء ويظل صلبًا لأسابيع؛ بينما يلين البعض الآخر، مثل التوت، بسرعة وقد يفسد خلال أيام. اللون وحده غالبًا ما يكون غير موثوق، والضغط باليد يخاطر بالتسبب بالكدمات. لطالما وازن القاصرون البشريون بين ما يرونه وما يشعرون به، لكن المنتجين يعانون الآن من نقص العمالة وحجم الفحص المطلوب. تعتمد الروبوتات الزراعية الحالية في الغالب على مُمسكات معدنية صلبة وكاميرات بعيدة عن الثمرة، مما يصعّب تقدير اللون والحجم والصلابة بدقة وقد يسبب إصابة المحاصيل الرقيقة.
الرؤية واللمس في ممسك مُدمج واحد
بنى الباحثون يدًا روبوتية على شكل نجمة بخمسة أصابع ناعمة مرتبة حول راحة مركزية. تتكوّن كل إصبع من مادة مرنة تشبه المطاط تنثني عندما يُضخ فيها الهواء. مخفية داخل الأصابع ألياف بلاستيكية شفافة توجه الضوء؛ تغيرات هذا الضوء تكشف مقدار انثناء كل إصبع وشدة الضغط على الجسم. عند أطراف الأصابع، تعمل الألياف على شكل حرف U كمستشعرات لمس، تخبر النظام ما إذا كان يمسك شيئًا ناعمًا أم صلبًا. في الراحة، تجلس كاميرا صغيرة ومستشعر مسافة جنبًا إلى جنب، مما يمنح منظرًا مقربًا لكل ثمرة ويقيس مدى حجمها الظاهر. يتكامل كل هذا مع لوحات دوائر صغيرة وحاسوب يدمجان الإشارات في صورة واحدة لما يلمسه الممسك وما يراه.
أداء اليد الناعمة على الفاكهة
لفهم ما يمكن لجهازهم فعله، قاس الفريق أولًا ميكانيكا اليد. تنحني الأصابع الناعمة حتى نحو ثُلثي الدائرة الكاملة مع مطابقة نتائج محاكاة الحاسوب، ويمكن للممسك أن يغلق حول الأجسام في أقل من ثانيتين. يمكنه رفع ما يصل إلى كيلوغرام واحد، أي أكثر من ستة عشر ضعف وزنه، وتمتد مساحته من فتحة مركزية صغيرة إلى مساحة تكفي لاحتواء أنواع عديدة من الفاكهة. حدد نظام الرؤية الأشكال البسيطة، مثل المكعبات والكرات، بشكل صحيح في معظم الأحيان وقدّر أحجامها بخطأ لا يتعدى نسبة قليلة في المئة، حتى على مسافات مشاهدة مختلفة. من خلال التركيز على النغمة الأساسية للون في كل بكسل، تمكنت الكاميرا من تمييز الأحمر عن الأخضر بشكل موثوق تحت إضاءة ثابتة، رغم أن الفروق الطفيفة بين فراولات حمراء متشابهة بقيت تشكّل تحديًا.
لمس يميز الصلب عن الطري
سمحت حساسات اللمس والانثناء لليد الروبوتية بإحساس الفاكهة بطرق تكمل بصرها. عندما تنثني الإصبع، يتغير الضوء داخل الألياف المدمجة بطريقة متوقعة، مما يمكّن النظام من استنتاج مدى انثناء كل إصبع ومدى ثقل الجسم المحتمل. عند الضغط على عينات اختبار تتراوح من مطاط طري جدًا إلى بلاستيك صلب، أظهرت مستشعرات طرف الإصبع تغييرات مميزة في شدة الضوء تتبع مقدار القوة المطبقة. سمح ذلك للممسك بتمييز الأجسام الصلبة عن الطرية ولإحساس الفرق بين الفاكهة غير الناضجة والناضجة اعتمادًا على الصلابة. في العروض التجريبية، أمسك الروبوت بلطف فراولات وأفوكادوات من السوبرماركت، وقاس لونها وحجمها، واستخدم البيانات المدمجة ليفصل العينات الناضجة عن غير الناضجة دون إحداث كدمات مرئية. كما سمح وحدة تدوير مدمجة لليد بالدوران حول ساق الثمرة لقطف فراولات الصوب من النبات. 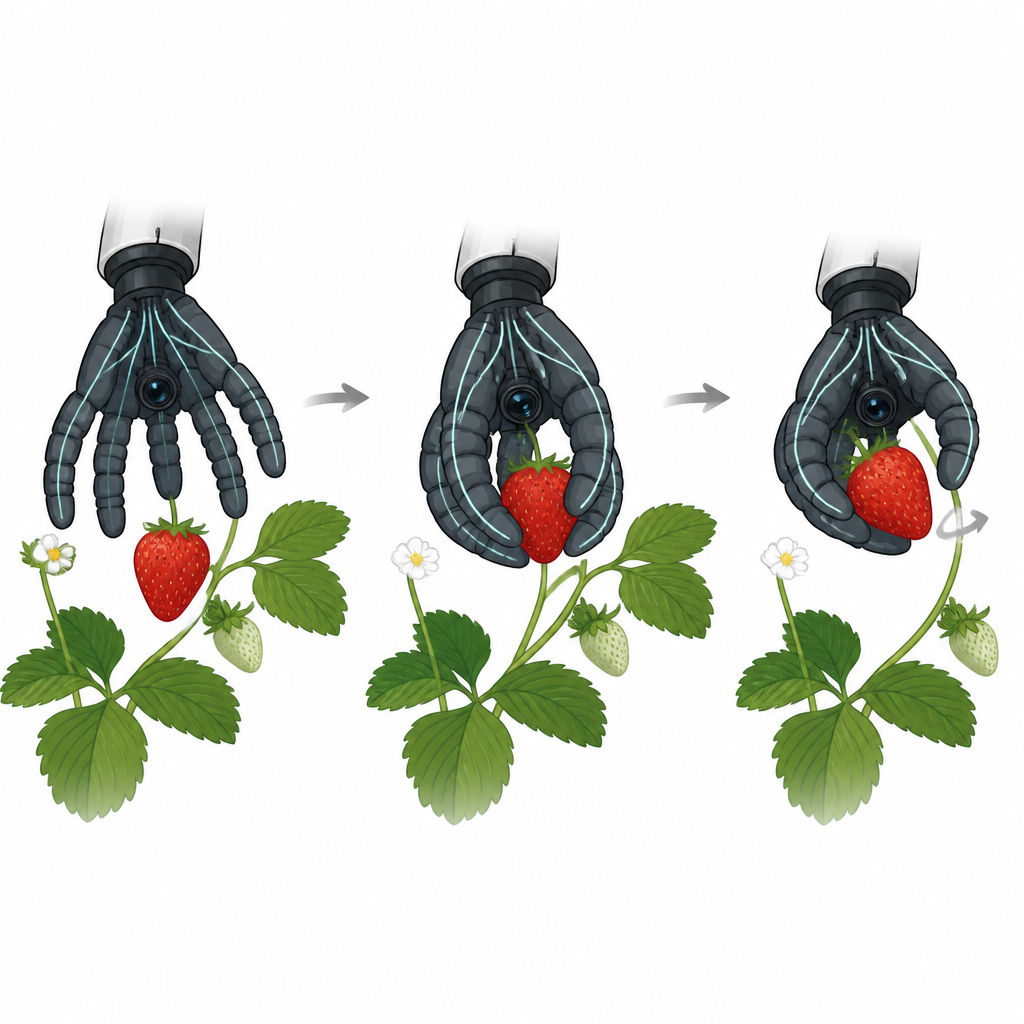
من نموذج مختبري إلى مساعد مزرعة في المستقبل
تُظهر هذه القدرات مجتمعة أن ممسكًا ناعمًا واحدًا يمكنه جمع معلومات غنية عن لون الثمرة وشكلها وحجمها وصلابتها بينما يؤدي عملية القطف بنفسه. بالنسبة للمزارعين، قد يدعم مثل هذا الجهاز قرارات أكثر دقة بشأن وقت الحصاد، ويقلل الحاجة إلى الضغط والتصنيف اليدوي، ويخفض الخسائر الناتجة عن المنتجات التالفة أو المفرطة النضج. على الرغم من أن النظام الحالي لا يزال يواجه قضايا عملية، مثل الأسلاك المعقدة والألياف الحساسة التي قد تلوثها عصائر الفاكهة، إلا أنه يشير إلى مستقبل تُسهم فيه روبوتات ذات أيادٍ رقيقة ومستشعرة في إيصال فاكهة سليمة وعالية الجودة من الحقل إلى المائدة.
الاستشهاد: Mishra, A.K., Ramaswami, A., Shree, V. et al. Sensor fusion of touch & vision in soft manipulators for fruit picking. Nat Commun 17, 4307 (2026). https://doi.org/10.1038/s41467-026-70588-9
الكلمات المفتاحية: الروبوتات الناعمة, حصاد الفاكهة, الاستشعار اللمسي, رؤية الحاسوب, الزراعة الدقيقة