Clear Sky Science · nl
Sensorfusie van aanraking & visie in zachte grijpers voor fruitpluk
Zachte robots voor delicaat fruit
Wie wel eens gekneusde aardbeien mee naar huis heeft genomen, weet hoe gemakkelijk kwetsbaar fruit beschadigt. Boeren hebben op grote schaal hetzelfde probleem en verliezen een aanzienlijk deel van de oogst doordat fruit te vroeg of te ruw wordt geplukt. Deze studie introduceert een zachte, met sensoren gevulde robothand die fruit kan zien en voelen zoals een menselijke plukker, zodat hij gewassen zoals aardbeien en avocado’s voorzichtig, snel en met veel minder verspilling kan oogsten. 
Waarom zachte handen op het veld belangrijk zijn
Veel vruchten geven alleen subtiele aanwijzingen over rijpheid. Sommige, zoals citrus, verkleuren langzaam en blijven wekenlang stevig; andere, zoals bessen, worden snel zacht en kunnen binnen dagen bederven. Alleen kleur is vaak onbetrouwbaar en drukken met de hand brengt het risico van kneuzing met zich mee. Menselijke plukkers wegen al lange tijd wat ze zien af tegen wat ze voelen, maar telers kampen nu met arbeidskrachttekorten en de enorme schaal van inspectie die nodig is. Bestaande landbouwrobots vertrouwen meestal op stijve metalen grippers en camera’s die ver van het fruit zijn geplaatst, wat het moeilijk maakt kleur, grootte en stevigheid nauwkeurig te beoordelen en toch kwetsbaar product te beschadigen.
Zien en voelen in één compact grijper
De onderzoekers bouwden een stervormige robothand met vijf zachte vingers die rond een centrale palm zijn geplaatst. Elke vinger is gemaakt van een flexibel rubberachtig materiaal dat buigt als er lucht in wordt gepompt. Verborgen in de vingers zitten doorzichtige plastic vezels die licht geleiden; veranderingen in dat licht tonen hoeveel elke vinger buigt en hoe hard hij op een voorwerp drukt. In de vingertoppen fungeren U-vormige vezels als tastsensoren en geven ze aan of het systeem iets zachts of stevigs vasthoudt. In de palm zitten naast elkaar een kleine camera en een afstandssensor, die een close-up van elk stuk fruit geven en meten hoe groot het lijkt. Dit alles wordt gekoppeld met kleine printplaatjes en een computer die de signalen samenvoegt tot één beeld van wat de grijper voelt en ziet.
Hoe de zachte hand presteert op fruit
Om te begrijpen wat het apparaat kon doen, mat het team eerst de mechanica van de hand. De zachte vingers buigen tot ongeveer twee derde van een volledige cirkel en volgen de computermodellen, en de gripper kan binnen twee seconden om voorwerpen sluiten. Hij kan tot één kilogram tillen, meer dan zestien keer zijn eigen gewicht, en zijn bereik breidt zich uit van een kleine centrale opening naar een gebied groot genoeg om veel soorten fruit te omsluiten. Het visiesysteem identificeerde eenvoudige vormen, zoals kubussen en sferen, vrijwel altijd correct en schatte hun grootte met slechts een paar procent fout, zelfs op verschillende kijkafstanden. Door zich te richten op de tint, of basiskleurtoon, in elke pixel kon de camera rood en groen betrouwbaar onderscheiden onder vaste belichting, hoewel subtiele verschillen tussen gelijksoortige rode aardbeien nog een uitdaging waren.
Aanraking die stevig van zacht onderscheidt
De aanraking- en buigsensoren laten de robothand fruit voelen op manieren die het zicht aanvullen. Terwijl een vinger krult, verandert het licht in de ingebedde vezel op voorspelbare wijze, waardoor het systeem kan afleiden hoe ver elke vinger heeft gebogen en hoe zwaar een voorwerp mogelijk is. Wanneer er tegen testmaterialen werd gedrukt, variërend van zeer zacht rubber tot stijf plastic, lieten de tastsensoren in de vingertop duidelijke veranderingen in lichtintensiteit zien die volgden hoeveel kracht werd uitgeoefend. Dit stelde de gripper in staat stijve voorwerpen van zachte te onderscheiden en het verschil tussen onrijp en rijp fruit op basis van stevigheid waar te nemen. In demonstraties pakte de robot zachtjes supermarkt-aardbeien en avocado’s, mat hun kleur en grootte, en gebruikte de gecombineerde data om rijpe van onrijpe monsters te scheiden zonder zichtbare kneuzingen. Een ingebouwd draaitoestel liet de hand zelfs rond de steel draaien om kas-aardbeien van de plant te trekken. 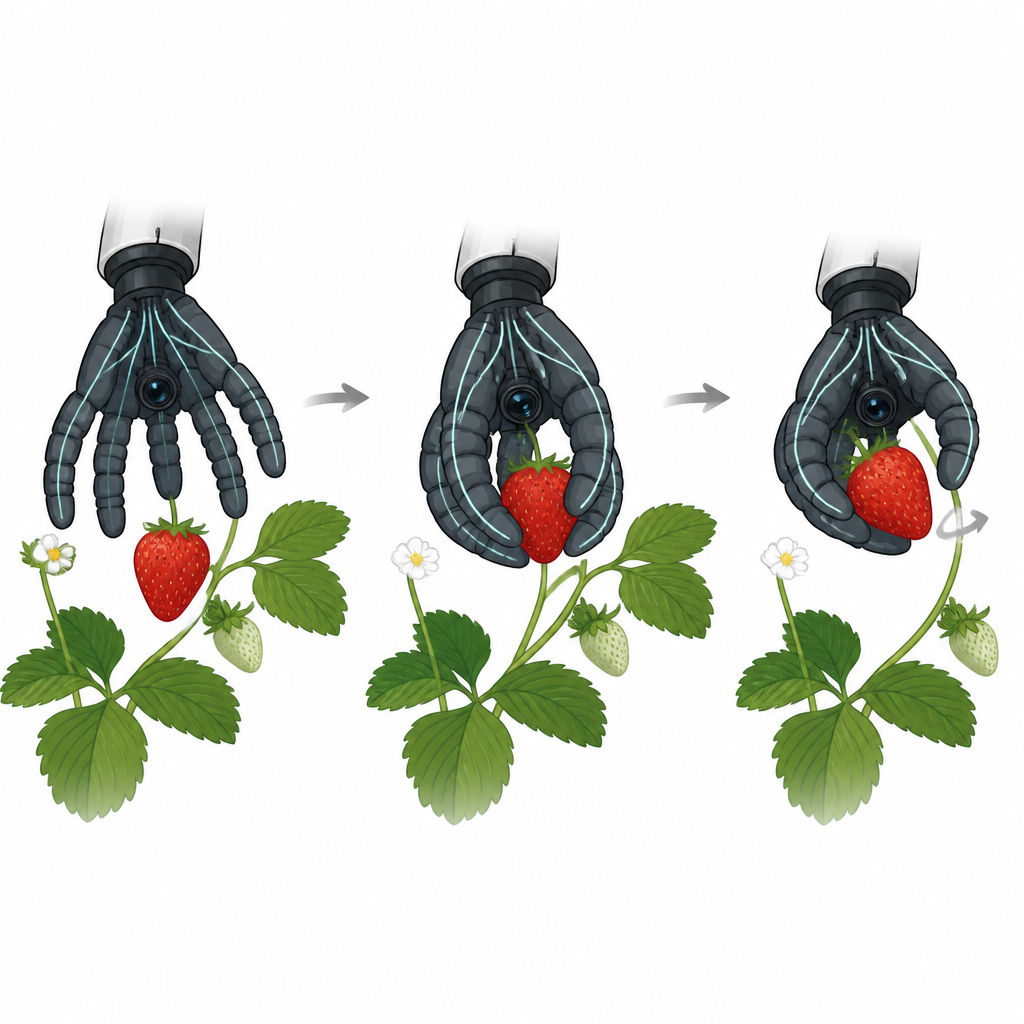
Van labprototype naar toekomstige hulp op de boerderij
Samen tonen deze vaardigheden aan dat één enkele zachte grijper rijke informatie over kleur, vorm, grootte en stevigheid van fruit kan verzamelen terwijl hij ook het plukken zelf uitvoert. Voor telers kan zo’n hulpmiddel ondersteunen bij nauwkeuriger beslissen wanneer te oogsten, de noodzaak van handmatig knijpen en sorteren verminderen en verliezen door beschadigd of overrijp product terugdringen. Hoewel het huidige systeem nog praktische issues kent, zoals complexe bedrading en delicate vezels die door fruitsap vervuild kunnen raken, wijst het op een toekomst waarin robots met zachte, voelende handen helpen om meer onbeschadigd, kwaliteitsfruit van het veld naar de tafel te brengen.
Bronvermelding: Mishra, A.K., Ramaswami, A., Shree, V. et al. Sensor fusion of touch & vision in soft manipulators for fruit picking. Nat Commun 17, 4307 (2026). https://doi.org/10.1038/s41467-026-70588-9
Trefwoorden: zachte robotica, fruitoogst, tactiele sensoring, computervisie, precisie-landbouw