Clear Sky Science · tr
Başarısızlıktan kaçınma bayesyen optimizasyonu ve başarısızlık-sınırı araması ile kazı kontrol parametrelerinin otomatik keşfi
Yarınki şantiye kazılarında daha akıllı kazma
Modern inşaat sahaları büyük miktarda toprağı hareket ettiren ağır makinelere dayanıyor, ancak bu makinelerden zarar vermeden en iyi şekilde yararlanmak zordur. Tam bir kepçe doldurmanın en iyi yolu genellikle lastik kayması veya aşırı yüklenmiş parçalar gibi tehlikeli koşullara çok yakındır. Bu çalışma, bir tekerlekli yükleyicinin nasıl kazma yapacağını bilgisayarların ayarlamasına yönelik yeni bir yaklaşım sunuyor; amaç, makinenin yüksek performans gösterirken tehlike bölgesinden uzak durmasını sağlamak.
Kazma görünenden neden daha zor
Bir tekerlekli yükleyiciyi kullanmak sadece kollara basmakla olmaz. Kepçe bir yığına daldıkça, toprak karmaşık ve değişen şekillerde tepki verir. Usta insan operatörler, tekerleklerin kaymaması veya hidroliklerin zorlanmaması için sürekli hız ve kepçe açısını ayarlar. Otomatik kontrol sistemleri için bu zor bir denge: toplanan toprak miktarını artıran ve yakıt tasarrufu sağlayan ayarları ararken kayma, zorlanma veya kararsız hareket oluşturan kombinasyonlardan kaçınmak gerekir.
Bilgisayarlara nereden uzak durulacağını öğretmek
Yazarlar bu zorluğu iki aşamaya ayırarak ele alıyor. İlk olarak, taş benzeri parçacıklardan oluşan bir yığına kazı yapan tekerlekli yükleyicinin ayrıntılı bir bilgisayar simülatörünü kullanıyorlar. Bu güvenli sanal ortamda sistem, kazı hızı ve kepçe eğimi gibi birçok kombinasyonu özgürce dener ve her denemenin “başarı” mı yoksa sık tekerlek kayması gibi bir “başarısızlık” mı olduğunu kaydeder. İstatistiksel bir yöntem kullanarak, kontrol uzayında hangi noktaların güvenli olma olasılığına göre bir sınır haritası çizerler. Bu harita, toprak ve makine fiziğinin tüm ayrıntılarını bilmeye gerek kalmadan riskli sınırın nerede olduğunu gösterir. 
Optimizatörün dikkatli keşfetmesine izin vermek
İkinci aşamada araştırmacılar, umut vadeden ayarları denemek ile belirsiz bölgeleri keşfetmek arasındaki dengeyi kuran bir strateji olan Bayesyen optimizasyonu uygularlar. Burada ortak bir sonraki deneme seçme kuralını, ilk aşamadan elde edilen daha yüksek güvenlik olasılığına sahip ayarları da tercih edecek şekilde genişletirler. Tek bir ağırlık değeri aramanın ne kadar temkinli olacağını kontrol eder: daha büyük bir değer aramayı haritanın daha güvenli bölgelerine yönlendirirken, daha küçük bir değer riskli sınıra daha cesur hamleler yapılmasına izin verir. Önemli olarak, önyargıyı önlemek için önceki güvenlik haritası bu aşamada sabit tutulur ve yalnızca gerçek veya simüle edilmiş kazı performansı yeni denemelerle güncellenir.
Basit manzaralar ve sanal toprak üzerinde fikri test etmek
Yöntemlerinin amaçlandığı gibi davranıp davranmadığını görmek için yazarlar önce gerçek güvenli bölgenin ve her ayarın kalitesinin bilindiği bir oyuncak probleme uygularlar. İki aşamalı yaklaşımları, yüksek performanslı ayarları bulmada standart optimizasyon yöntemleriyle benzer hız gösterirken, güvenliği görmezden gelen veya ağır hesaplama ile garantilemeye çalışan yaklaşımlara kıyasla çok daha az başarısızlık yaşatır. Ardından sisteme yatay kazı hızı ve kepçe eğimi desenini seçmesi gereken tekerlekli yükleyici simülatörüne geçerler. Sonuçlar, güvensiz kayma olaylarının yaklaşık her on denemede birin altına düştüğünü, toplanan toprak miktarı ve gereken çabanın ise daha az temkinli stratejilerle rekabetçi kaldığını gösterir. Güvenlik ağırlığını ayarlamak, kullanıcıların daha hızlı kazanımlar için ara sıra riskli denemeleri veya daha temkinli bir yaklaşımı tercih etmesini sağlar. 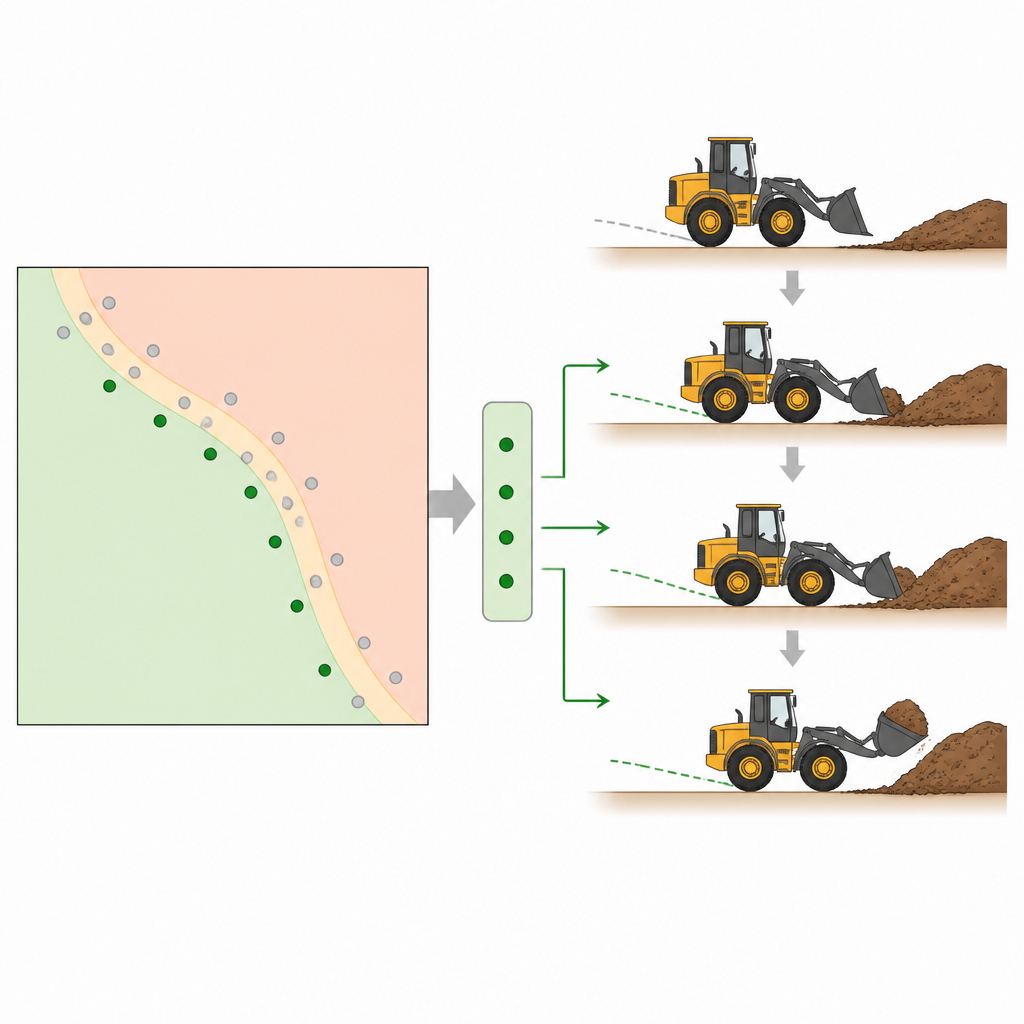
Gerçek makineler için bunun anlamı
Uzman olmayanlar için temel mesaj şudur: yöntem, otomatik bir kazı sistemine sadece nasıl iyi kazılacağını değil, aynı zamanda tehlike bölgesinin nerede olduğunu ve ona nasıl hemen içinde kalınarak yaklaşılacağını da öğretir. Önce simülasyonda bir güvenlik sınırı öğrenip ardından bu bilgiyi gerçek dünya ayarlamasını yönlendirmek için kullanarak, yaklaşım pahalı makinelerde gereken riskli deneme sayısını azaltabilir. Simüle edilmiş ve gerçek toprak arasındaki farkları ele almak ve daha fazla kontrol ayarına ölçeklendirmek için daha fazla çalışma gerekse de, bu iki aşamalı strateji hem insanları hem ekipmanı daha güvende tutarken inşaat robotlarının verimli öğrenmesine doğru bir yol gösteriyor.
Atıf: Koyama, M., Ishikawa, M. Failure-avoidance bayesian optimization with failure-boundary search for automatic exploration of digging control parameters. Sci Rep 16, 15580 (2026). https://doi.org/10.1038/s41598-026-45046-7
Anahtar kelimeler: Bayesyen optimizasyon, otomatik kazı, inşaat robotikleri, güvenli kontrol, tekerlekli yükleyici