Clear Sky Science · ru
Байесовская оптимизация с избеганием ошибок и поиском границы отказов для автоматического подбора параметров копания
Более умное копание на стройках будущего
Современные стройки полагаются на тяжелую технику, перемещающую огромные объемы грунта, но получить от этих машин максимум производительности, не повредив их, сложно. Лучший способ набить полный ковш часто находится буквально рядом с небезопасными условиями, такими как прокручивание колес или перегрузки узлов. В этом исследовании предложен новый подход, позволяющий компьютерным системам настраивать параметры копания фронтального погрузчика так, чтобы он работал эффективно, оставаясь в безопасной зоне.
Почему копание сложнее, чем кажется
Управлять фронтальным погрузчиком — это не просто тянуть за рычаги. Когда ковш врезается в вал, грунт реагирует сложными и изменяющимися способами. Опытные операторы постоянно корректируют скорость и угол ковша, чтобы захватывать больше грунта, не допуская пробуксовки колес и излишних нагрузок на гидравлику. Для автоматических систем управления это трудная задача: им нужно находить настройки, которые увеличивают добычу грунта и экономят топливо, но при этом избегать комбинаций, приводящих к пробуксовке, перегрузке или нестабильному движению.
Обучая компьютеры, куда не стоит заходить
Авторы решают эту задачу, разделив её на два этапа. Сначала они используют подробную компьютерную симуляцию копания фронтального погрузчика в насыпи из частиц, похожих на камни. В этом безопасном виртуальном пространстве система свободно пробует множество сочетаний скорости копания и наклона ковша и фиксирует, является ли каждый опыт «успехом» или «отказом», например при частых пробуксовках колес. С помощью статистического метода затем строится карта границы, разделяющей безопасные и небезопасные настройки, и каждой точке в пространстве управляющих параметров присваивается вероятность безопасности. Эта карта отражает, где находится рискованная граница, без необходимости детального знания всей физики грунта и техники. 
Давая оптимизатору возможность исследовать осторожно
На втором этапе исследователи проводят байесовскую оптимизацию — стратегию выбора новых испытаний, уравновешивающую попытки перспективных настроек и исследование неопределённых областей. Здесь они расширяют распространённое правило выбора следующего испытания так, чтобы оно также отдавал предпочтение настройкам с более высокой вероятностью безопасности, полученной на первом этапе. Один параметр-коэффициент контролирует осторожность поиска: большее значение направляет поиск в более безопасные части карты, а меньшее позволяет смелее подходить к рискованной границе. Важно, что ранее построенная карта безопасности остаётся фиксированной на этом этапе, чтобы избежать смещения, и обновляется лишь информация о реальной или симулированной производительности при новых испытаниях.
Тестирование на простых ландшафтах и виртуальном грунте
Чтобы проверить поведение метода, авторы сначала применяют его к модельной задаче, где истинная безопасная область и качество каждой настройки известны. Их двухэтапный подход демонстрирует скорость, сопоставимую со стандартными методами оптимизации при поиске высокопроизводительных настроек, но с существенно меньшим числом отказов по сравнению со стратегиями, которые либо игнорируют безопасность, либо пытаются гарантировать её при высокой вычислительной стоимости. Затем они переходят к симулятору фронтального погрузчика, где системе предстоит выбирать горизонтальную скорость копания и профиль наклона ковша. Результаты показывают, что частота небезопасных пробуксовок снижается до примерно одного случая на десять испытаний, при этом количество извлечённого грунта и затраты усилий остаются конкурентоспособными по сравнению с менее осторожными стратегиями. Настройка коэффициента безопасности позволяет пользователю обменять редкие рискованные испытания на более быстрое улучшение результатов или наоборот. 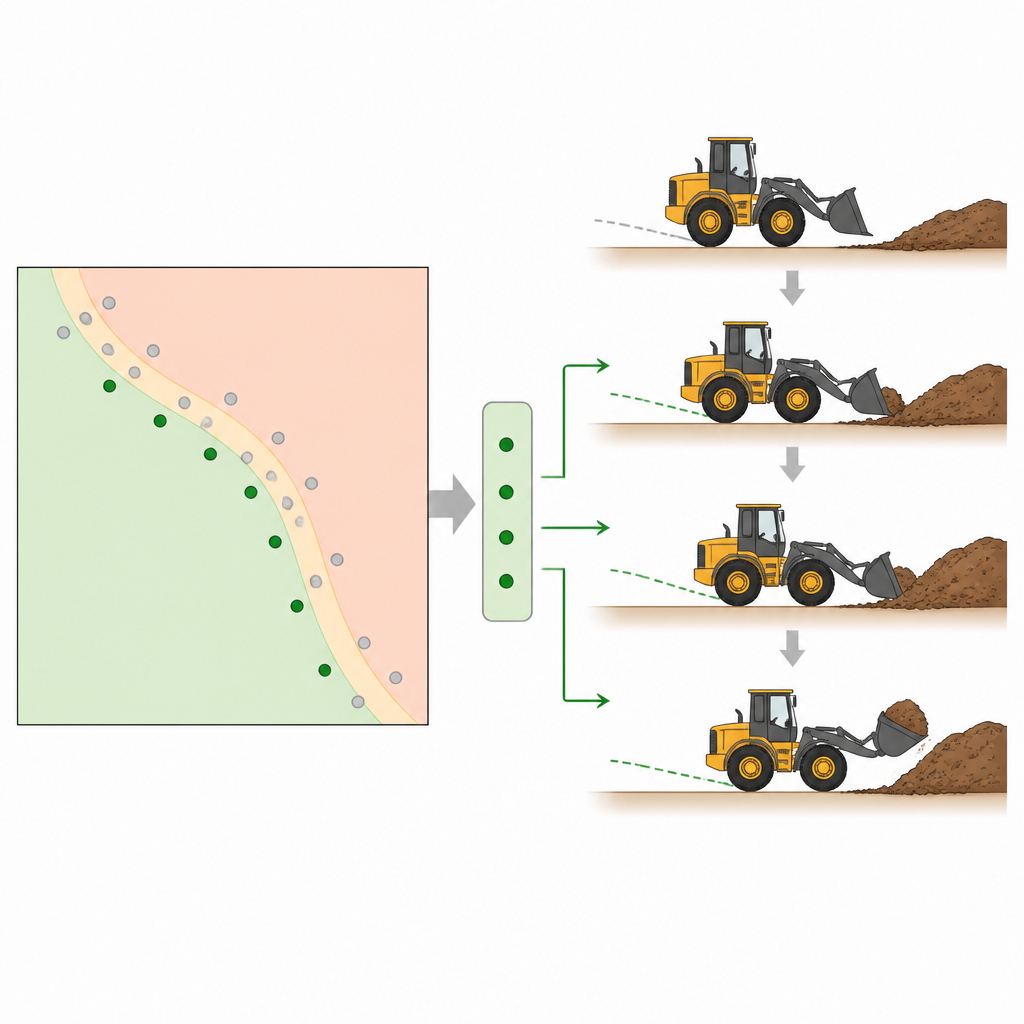
Что это значит для реальных машин
Для неспециалистов главный вывод таков: метод обучает автоматическую систему копания не только эффективно работать, но и распознавать зону опасности и оставаться чуть в пределах её границы. Сначала выучив границу безопасности в симуляции и затем используя эти знания для руководства реальной настройкой, подход может сократить число рискованных экспериментов на дорогой технике. Хотя дополнительная работа требуется для учёта различий между симулированным и реальным грунтом и для расширения числа управляющих параметров, эта двухшаговая стратегия указывает путь к строительным роботам, которые могут учиться эффективно, обеспечивая большую безопасность для людей и оборудования.
Цитирование: Koyama, M., Ishikawa, M. Failure-avoidance bayesian optimization with failure-boundary search for automatic exploration of digging control parameters. Sci Rep 16, 15580 (2026). https://doi.org/10.1038/s41598-026-45046-7
Ключевые слова: Байесовская оптимизация, автоматическое землеройное оборудование, робототехника для строительства, безопасное управление, фронтальный погрузчик