Clear Sky Science · nl
Bayesiaanse optimalisatie met falingsvermijding en falingsgrens-zoektocht voor automatische verkenning van graafbesturingsparameters
Slimmer graven op de bouwplaatsen van morgen
Moderne bouwplaatsen rekenen op zware machines die enorme hoeveelheden grond verplaatsen, maar het maximale uit die machines halen zonder ze te beschadigen is een uitdaging. De beste manier om een volle bak te scheppen ligt vaak vlak naast onveilige condities zoals bandenslip of overbelaste onderdelen. Deze studie presenteert een nieuwe manier voor computers om de graafinstellingen van een wiellader af te stemmen zodat hij hard kan werken terwijl hij buiten de gevarenzone blijft.
Waarom graven moeilijker is dan het lijkt
Een wiellader bedienen is niet zomaar hendels overhalen. Terwijl de bak in een hoop bijt, duwt de grond op complexe en veranderlijke manieren terug. Bekwame menselijke bestuurders passen continu snelheid en bakhoek aan om meer grond te pakken zonder dat de banden doorslaan of de hydrauliek overbelast raakt. Voor automatische besturingssystemen is dit een moeilijke evenwichtsoefening: ze moeten instellingen zoeken die de hoeveelheid opgepakte grond verhogen en brandstof besparen, maar combinaties vermijden die slip, belasting of instabiele beweging veroorzaken.
Computers leren waar ze niet moeten komen
De auteurs pakken deze uitdaging aan door het probleem in twee fasen op te splitsen. Eerst gebruiken ze een gedetailleerde computersimulator van een wiellader die in een hoop rotsachtige deeltjes graaft. In deze veilige virtuele omgeving probeert het systeem vrijelijk vele combinaties van graafsnelheid en bakkanteling en registreert simpelweg of elke proef een “succes” of een “falen” is, zoals frequent bandenslip. Met een statistische methode tekent het vervolgens een kaart van de grens die veilige en onveilige instellingen scheidt, en kent het voor elk punt in de besturingsruimte een kans toe dat het veilig is. Deze kaart vangt waar de risicovolle rand ligt zonder dat alle fysica van grond en machine tot in detail bekend hoeft te zijn. 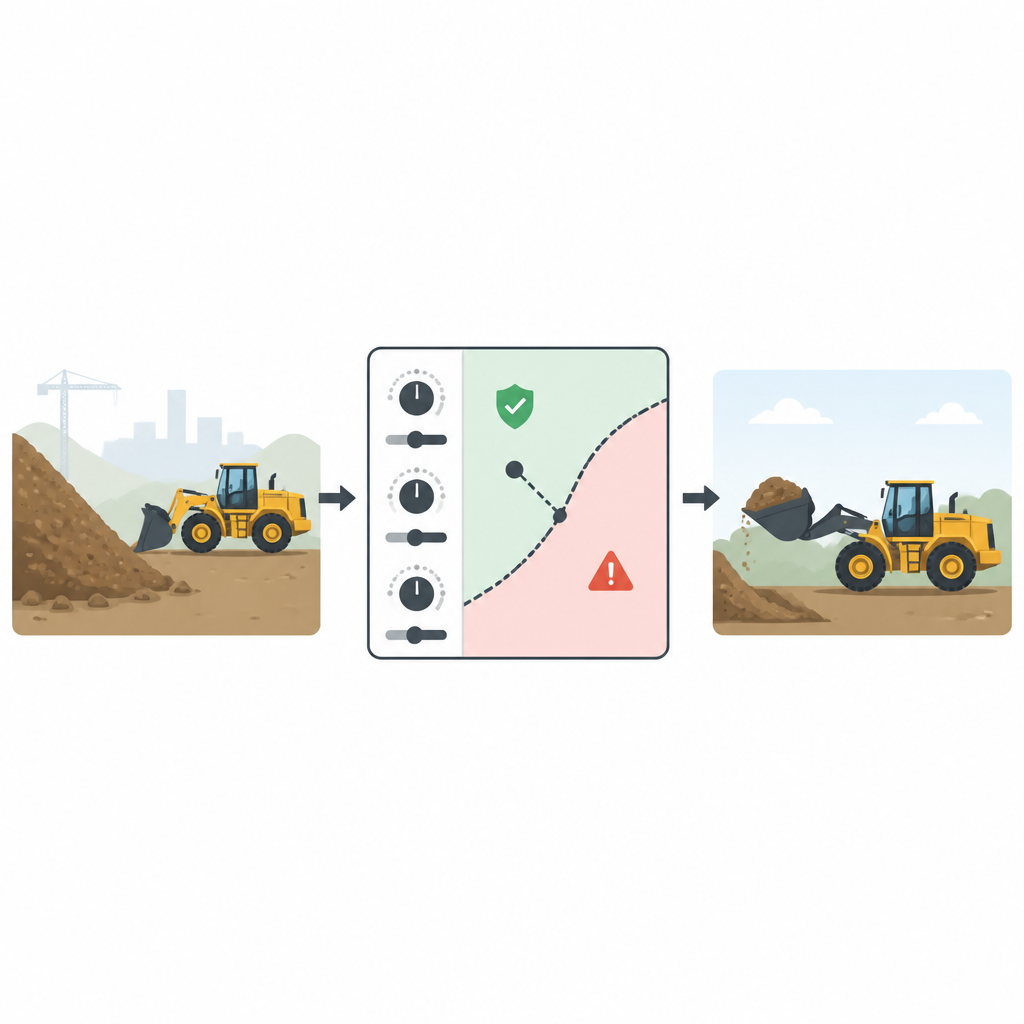
De optimizer voorzichtig laten verkennen
In de tweede fase voeren de onderzoekers Bayesiaanse optimalisatie uit, een strategie om nieuwe proeven te kiezen die een balans zoekt tussen het uitproberen van veelbelovende instellingen en het verkennen van onzekere gebieden. Hier breiden ze een veelgebruikte regel voor het kiezen van de volgende proef uit, zodat deze ook instellingen bevoordeelt met een hogere veiligheidskans uit de eerste fase. Eén gewichtsstelling bepaalt hoe voorzichtig de zoektocht is: een hogere waarde stuurt de zoek naar veiligere delen van de kaart, terwijl een lagere waarde gewaagdere stappen dichter bij de risicovolle rand toestaat. Belangrijk is dat de eerder gefundeerde veiligheidskaart tijdens deze fase vastgehouden wordt om bias te voorkomen, en dat alleen echte of gesimuleerde graafprestaties worden geüpdatet naarmate nieuwe proeven worden uitgevoerd.
De methode testen op eenvoudige landschappen en virtuele aarde
Om te controleren of hun methode zich gedraagt zoals bedoeld, passen de auteurs haar eerst toe op een toy-probleem waarin de echte veilige regio en de kwaliteit van elke instelling bekend zijn. Hun tweefasige aanpak behaalt vergelijkbare snelheid als standaard optimalisatiemethoden bij het vinden van goed presterende instellingen, maar met veel minder mislukkingen dan benaderingen die veiligheid negeren of die proberen veiligheid te garanderen met zware berekeningen. Vervolgens gaan ze naar de wiellader-simulator, waar het systeem een horizontale graafsnelheid en een patroon van bakkanteling moet kiezen. De resultaten tonen dat onveilige slipgebeurtenissen dalen tot onder ongeveer één op de tien proeven, terwijl de hoeveelheid opgepakte grond en de benodigde inspanning concurrerend blijven met minder voorzichtige strategieën. Door het veiligheidsgewicht aan te passen kunnen gebruikers af en toe risicovolle proeven inruilen voor snellere verbeteringen of andersom. 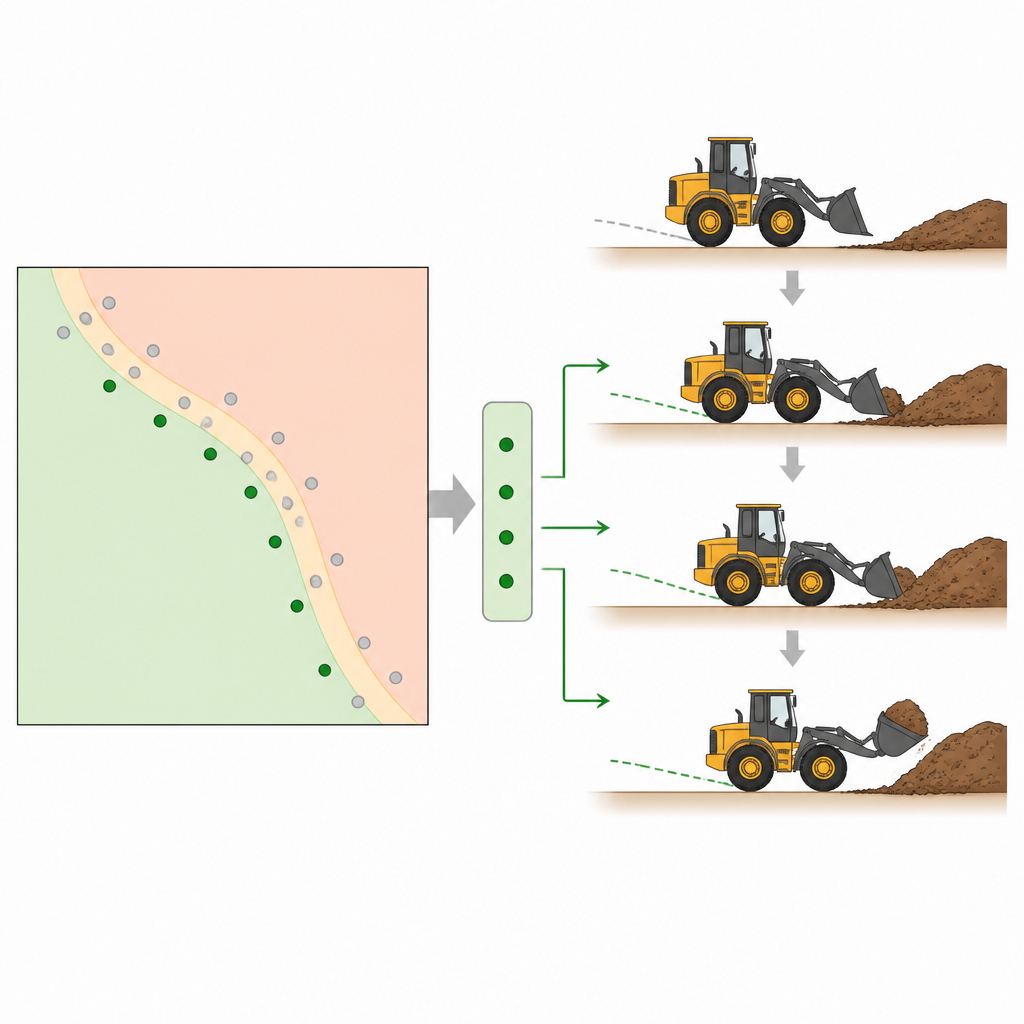
Wat dit betekent voor echte machines
Voor niet-specialisten is de kernboodschap dat de methode een automatisch graafsysteem niet alleen leert hoe het goed kan graven, maar ook waar de gevarenzone ligt en hoe het net binnen die grens blijft. Door eerst in simulatie een veiligheidsgrens te leren en die kennis vervolgens te gebruiken om tuning in de echte wereld te sturen, kan de benadering het aantal risicovolle experimenten op dure machines verminderen. Hoewel verder werk nodig is om verschillen tussen gesimuleerde en echte grond af te handelen en om uit te breiden naar meer besturingsinstellingen, wijst deze tweestapsstrategie in de richting van bouwrobots die efficiënt leren terwijl zowel mensen als apparatuur veiliger blijven.
Bronvermelding: Koyama, M., Ishikawa, M. Failure-avoidance bayesian optimization with failure-boundary search for automatic exploration of digging control parameters. Sci Rep 16, 15580 (2026). https://doi.org/10.1038/s41598-026-45046-7
Trefwoorden: Bayesiaanse optimalisatie, automatisch graven, bouwrobotica, veilige besturing, wiellader