Clear Sky Science · he
אופטימיזציה בייזיאנית למניעת כישלון עם חיפוש גבול הכישלון לחקירה אוטומטית של פרמטרי בקרה בחפירה
חפירה חכמה יותר באתרי הבנייה של המחר
אתרי בנייה מודרניים מסתמכים על מכונות כבדות שמזיזות כמויות אדירות של אדמה, אך להפיק מהן את המיטב בלי לגרום נזק הוא עניין עדין. הדרך הטובה ביותר למלא דלי במלואו נמצאת לעתים קרובות ממש ליד תנאים לא־בטוחים כגון החלקת צמיגים או עומסים מוגזמים על הרכיבים. במחקר זה מוצע דרך חדשה שבה מחשבים מגדירים את אופן החפירה של מחלק גלגלים כך שיוכל לעבוד בעומס כבד תוך הימנעות מאזורי הסיכון.
למה חפירה קשה יותר ממה שזה נראה
הפעלת מחלק גלגלים אינה עניין של משיכת זרועות בלבד. כאשר הדלי חודר לערימה, האדמה דוחפת בחזרה בצורה מורכבת ומשתנה. מפעילים מיומנים מתאימים כל הזמן מהירות וזווית הדלי כדי לתפוס יותר אדמה בלי להפעיל החלקת צמיגים או למתוח יתר על המידה את המערכת ההידראולית. עבור מערכות בקרה אוטומטיות זו איזון קשה: עליהן לחפש הגדרות שמגבירות את כמות החומר הנאספת וחוסכות דלק, ובו בזמן להימנע משילובים שגורמים להחלקות, עומס יתר או תנועה לא יציבה.
ללמד את המחשבים לאן לא ללכת
המחברים מתמודדים עם האתגר על ידי חלוקת הבעיה לשני שלבים. תחילה הם משתמשים בסימולטור מפורט של מחלק גלגלים החופר בערימת חלקיקים הדומים לסלעים. במרחב הוירטואלי הבטוח הזה המערכת מנסה בחופשיות צירופים רבים של מהירות חפירה ושיפוע הדלי ומתעדת אם כל ניסוי הוא "הצלחה" או "כישלון", כגון החלקות תכופות של הצמיגים. באמצעות שיטה סטטיסטית היא מציירת מפה של הגבול שמפריד בין הגדרות בטוחות ללא־בטוחות, ומשייכת לכל נקודה במרחב הבקרה הסתברות שהיא בטוחה. המפה הזאת לוכדת היכן נמצא קו הסיכון מבלי צורך לדעת את כל הפיזיקה של האדמה והמכונה בפרטי פרטים. 
לאפשר לממקסם לחקור בזהירות
בשלב השני, החוקרים מבצעים אופטימיזציה בייזיאנית, אסטרטגיה לבחירת ניסויים חדשים שמאזנת בין ניסיון הגדרות מבטיחות לחקירה של אזורים לא ודאיים. כאן הם מרחיבים כלל מקובל לבחירת הניסוי הבא כך שיפעל גם לטובת הגדרות בעלות הסתברות ביטחון גבוהה יותר מהשלב הראשון. משקל יחיד שולט עד כמה החיפוש זהיר: ערך גדול יותר מייצב את החיפוש לכיוון חלקי המפה הבטוחים יותר, בעוד שערך קטן יותר מאפשר צעדים נועזים יותר קרוב לקו הסיכון. חשוב לציין שמפת הבטיחות המוקדמת נשארת קבועה בשלב זה כדי להמנע מהטיה, ורק ביצועי החפירה בפועל או בסימולציה מתעדכנים כשהניסויים החדשים מתבצעים.
בדיקת הרעיון על נופים פשוטים ואדמה וירטואלית
כדי לבדוק האם השיטה מתנהגת כפי שמצופה, המחברים מחילים אותה תחילה על בעיה משחק שבה האזור הבטוח והאיכות של כל הגדרה ידועים. גישתם בת שני השלבים משיגה קצב זהה לזה של שיטות אופטימיזציה סטנדרטיות במציאת הגדרות בעלות ביצועים גבוהים, אך עם הרבה פחות כישלונות מאשר גישות שמתעלמות מהביטחון או שמנסות להבטיח אותו בעזרת חישוב כבד. לאחר מכן הם עוברים לסימולטור של מחלק הגלגלים, שבו המערכת בוחרת מהירות חפירה אופקית ותבנית זווית דלי. התוצאות מראות שאירועי החלקה לא בטוחים יורדים למעט מתחת לאחד בעשרה ניסויים, בעוד שכמות החומר שנאספה והמאמץ הנדרש נשארים תחרותיים מול אסטרטגיות פחות זהירות. התאמת משקל הבטיחות מאפשרת למשתמשים לסחור בין ניסויים מסוכנים מדי פעם למען שיפורים מהירים יותר או להפך. 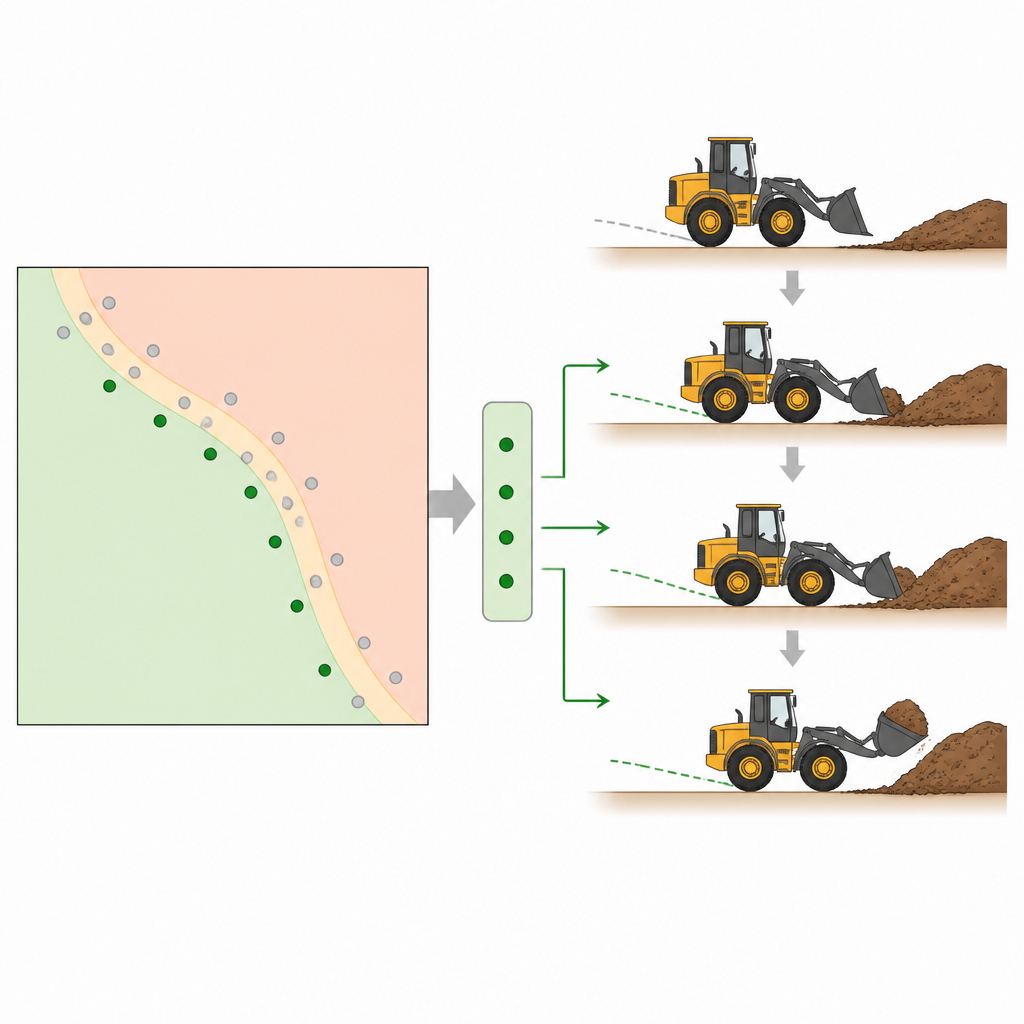
מה זה אומר עבור מכונות אמיתיות
עבור לא־מומחים, המסר המרכזי הוא שהשיטה מלמדת מערכת חפירה אוטומטית לא רק איך לחפור היטב, אלא גם היכן נמצא אזור הסיכון וכיצד להישאר ממש בתוך הגבול הבטוח. על ידי למידת גבול בטיחות תחילה בסימולציה ושימוש בידע הזה כדי להנחות כוונון בעולם האמיתי, הגישה יכולה להפחית את מספר הניסויים המסוכנים הנדרשים על מכונות יקרות. בעוד שעבודות נוספות נדרשות כדי להתמודד עם הבדלים בין אדמה מדומה לאדמה אמתית ולשדרג למספר רב יותר של פרמטרי בקרה, אסטרטגיית השלביים הזו מציתה את האפשרות לרובוטי בנייה שלומדים ביעילות תוך שמירה טובה יותר על אנשים וציוד.
ציטוט: Koyama, M., Ishikawa, M. Failure-avoidance bayesian optimization with failure-boundary search for automatic exploration of digging control parameters. Sci Rep 16, 15580 (2026). https://doi.org/10.1038/s41598-026-45046-7
מילות מפתח: אופטימיזציה בייזיאנית, חפירה אוטומטית, רובוטיקה בבנייה, בקרה בטוחה, מחלק גלגלים