Clear Sky Science · de
Fehlervermeidende Bayessche Optimierung mit Fehlergrenzen-Suche zur automatischen Erkundung von Grubsteuerungsparametern
Intelligenteres Graben auf den Baustellen von morgen
Moderne Baustellen setzen auf schwere Maschinen, die große Erdvolumina bewegen; das Optimum aus diesen Maschinen herauszuholen, ohne sie zu beschädigen, ist jedoch anspruchsvoll. Die beste Art, eine volle Schaufel zu erhalten, liegt oft dicht neben unsicheren Bedingungen wie Reifenrutschen oder überlasteten Bauteilen. Diese Studie stellt eine neue Methode vor, mit der Computer die Grabsteuerung eines Radladers so abstimmen, dass er leistungsstark arbeitet und zugleich außerhalb der Gefahrenzone bleibt.
Warum Graben schwieriger ist, als es aussieht
Einen Radlader zu bedienen heißt nicht einfach Hebel zu bewegen. Wenn die Schaufel in einen Erdhaufen greift, wehrt sich das Material auf komplexe, sich wandelnde Weise. Erfahrene Bediener passen ständig Geschwindigkeit und Schaufelneigung an, um mehr Material zu fassen, ohne die Reifen durchdrehen zu lassen oder die Hydraulik zu überlasten. Für automatische Steuerungen ist das ein schwieriger Balanceakt: Sie müssen Einstellungsbereiche finden, die die geförderte Menge und den Kraftstoffverbrauch verbessern, zugleich aber Kombinationen vermeiden, die Rutschen, Belastungen oder instabile Bewegungen verursachen.
Computern beibringen, wohin sie nicht gehen sollten
Die Autoren gehen das Problem in zwei Schritten an. Zuerst nutzen sie einen detaillierten Computersimulator, in dem ein Radlader in einen Haufen aus steinähnlichen Partikeln gräbt. In diesem sicheren virtuellen Raum probiert das System frei viele Kombinationen aus Grabgeschwindigkeit und Schaufelneigung aus und protokolliert jeweils, ob der Versuch ein "Erfolg" oder ein "Fehlschlag" war, etwa wegen häufigen Reifenrutschens. Mit einer statistischen Methode zeichnen sie anschließend eine Karte der Grenze, die sichere und unsichere Einstellungen trennt, und weisen jedem Punkt im Steuerraum eine Wahrscheinlichkeit für Sicherheit zu. Diese Karte fängt die Lage der riskanten Grenze ein, ohne alle physikalischen Details von Boden und Maschine genau kennen zu müssen. 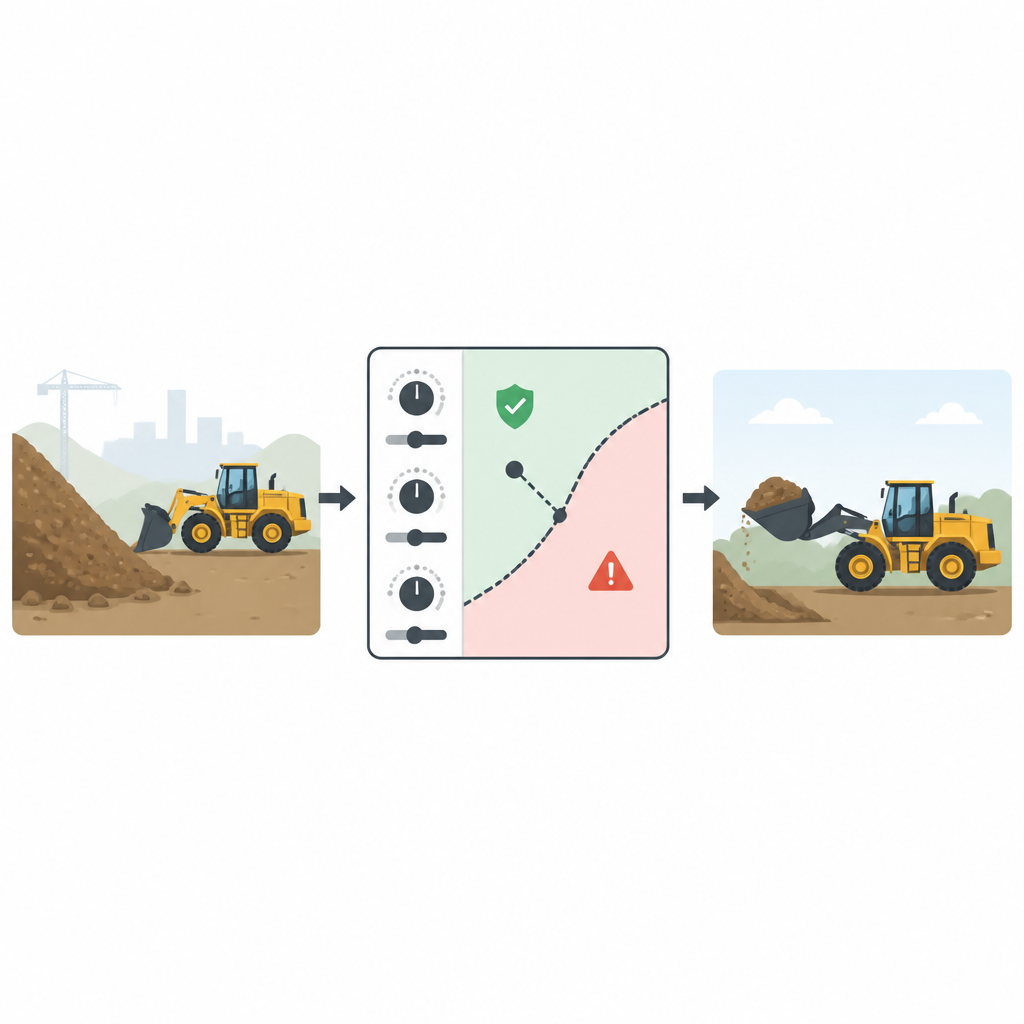
Den Optimierer vorsichtig erkunden lassen
Im zweiten Schritt führen die Forschenden eine Bayessche Optimierung durch, eine Strategie zur Auswahl neuer Versuche, die vielversprechende Einstellungen gegen unsichere Gebiete abwägt. Hier erweitern sie eine übliche Regel zur Auswahl des nächsten Versuchs so, dass sie auch Einstellungen mit höherer Sicherheitswahrscheinlichkeit aus der ersten Phase bevorzugt. Ein einziger Gewichtungsfaktor steuert, wie vorsichtig die Suche ist: Ein größerer Wert lenkt die Suche in sicherere Bereiche der Karte, ein kleinerer erlaubt kühnere Schritte näher an die riskante Grenze. Wichtig ist, dass die zuvor erstellte Sicherheitskarte in dieser Phase fixiert bleibt, um Verzerrungen zu vermeiden; nur die realen oder simulativen Grableistungen werden beim Ablauf neuer Versuche aktualisiert.
Die Idee auf einfachen Landschaften und in virtuellem Boden testen
Um zu prüfen, ob die Methode wie gewünscht funktioniert, wenden die Autoren sie zunächst auf ein Toy-Problem an, bei dem die wahre sichere Region und die Qualität jeder Einstellung bekannt sind. Ihr zweistufiger Ansatz erreicht die Geschwindigkeit herkömmlicher Optimierungsverfahren beim Finden leistungsstarker Einstellungen, jedoch mit deutlich weniger Fehlschlägen als Ansätze, die entweder Sicherheit ignorieren oder sie mit hohem Rechenaufwand erzwingen. Anschließend geht es in den Radlader-Simulator, in dem das System eine horizontale Grabgeschwindigkeit und ein Schaufelneigungsmuster wählen muss. Die Ergebnisse zeigen, dass unsichere Rutsch-Ereignisse auf unter etwa einen von zehn Versuchen sinken, während die erfasste Materialmenge und der erforderliche Aufwand mit weniger vorsichtigen Strategien konkurrenzfähig bleiben. Durch Anpassen des Sicherheitsgewichts können Anwender gelegentliche risikoreichere Versuche gegen schnellere Fortschritte eintauschen oder umgekehrt. 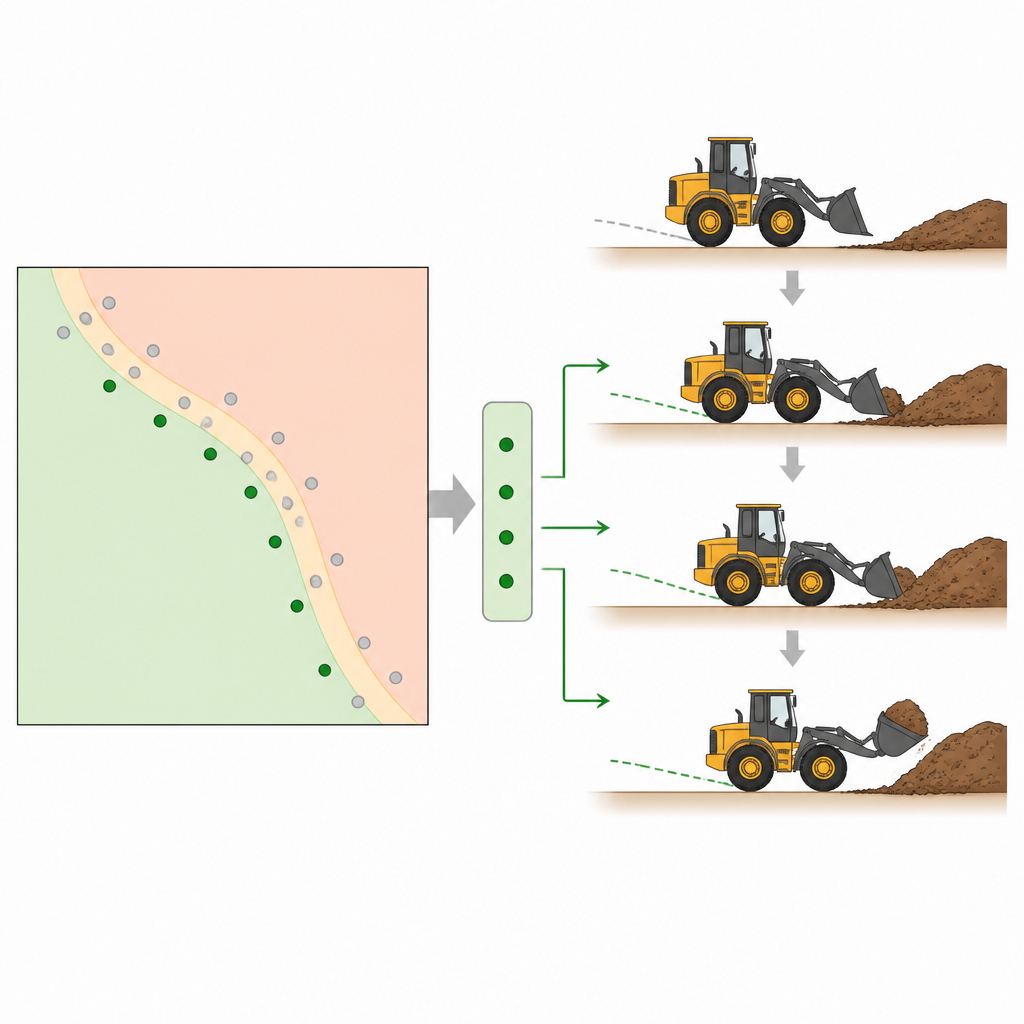
Was das für reale Maschinen bedeutet
Für Nicht-Fachleute ist die Kernbotschaft: Die Methode bringt einem automatischen Grab-System nicht nur bei, wie man gut gräbt, sondern auch, wo die Gefahrenzone liegt und wie man sich knapp innerhalb davon hält. Indem zunächst eine Sicherheitsgrenze in der Simulation gelernt und dieses Wissen anschließend zur Steuerung der realen Abstimmung genutzt wird, kann der Ansatz die Zahl riskanter Experimente an teuren Maschinen verringern. Zwar sind weitere Arbeiten nötig, um Unterschiede zwischen simuliertem und realem Boden zu überbrücken und um mehr Steuerungsparameter zu skalieren, doch die zweistufige Strategie weist den Weg zu Baurobotern, die effizient lernen und zugleich Menschen und Geräte sicherer halten können.
Zitation: Koyama, M., Ishikawa, M. Failure-avoidance bayesian optimization with failure-boundary search for automatic exploration of digging control parameters. Sci Rep 16, 15580 (2026). https://doi.org/10.1038/s41598-026-45046-7
Schlüsselwörter: Bayessche Optimierung, automatisches Aushubverfahren, Baurobotik, sichere Steuerung, Radlader