Clear Sky Science · fr
Optimisation bayésienne évitant les pannes avec recherche de la frontière de défaillance pour l’exploration automatique des paramètres de creusage
Creusage plus intelligent sur les chantiers de demain
Les chantiers modernes reposent sur des engins lourds qui déplacent d’énormes quantités de terre, mais tirer le meilleur parti de ces machines sans les endommager est délicat. La meilleure façon de remplir une benne se situe souvent tout près de conditions dangereuses comme le glissement des pneus ou la surcharge des composants. Cette étude présente une nouvelle méthode permettant aux ordinateurs d’ajuster la façon dont un chargeur sur pneus creuse afin qu’il puisse travailler intensément tout en restant en dehors de la zone dangereuse.
Pourquoi creuser est plus difficile qu’il n’y paraît
Piloter un chargeur sur pneus n’est pas seulement une question de manettes à pousser. Lorsque la benne pénètre dans un tas, le sol réagit de façon complexe et variable. Les opérateurs expérimentés ajustent en permanence la vitesse et l’inclinaison de la benne pour empocher plus de terre sans faire patiner les pneus ni solliciter excessivement les systèmes hydrauliques. Pour les systèmes de commande automatiques, c’est un équilibre difficile : ils doivent chercher des réglages qui augmentent la quantité de matériau récupéré et économisent du carburant, tout en évitant des combinaisons qui provoquent du glissement, des contraintes excessives ou des mouvements instables.
Apprendre aux ordinateurs où ne pas aller
Les auteurs abordent ce défi en divisant le problème en deux étapes. D’abord, ils utilisent un simulateur détaillé d’un chargeur creusant dans un tas de particules de type rocheux. Dans cet espace virtuel sécurisé, le système teste librement de nombreuses combinaisons de vitesse de creusage et d’inclinaison de la benne et enregistre simplement si chaque essai est un « succès » ou un « échec », par exemple en cas de glissements fréquents des pneus. À l’aide d’une méthode statistique, il trace ensuite une carte de la frontière qui sépare les réglages sûrs des réglages dangereux, en attribuant une probabilité de sécurité à chaque point de l’espace de contrôle. Cette carte capture l’emplacement du bord risqué sans avoir besoin de connaître en détail toute la physique du sol et des machines. 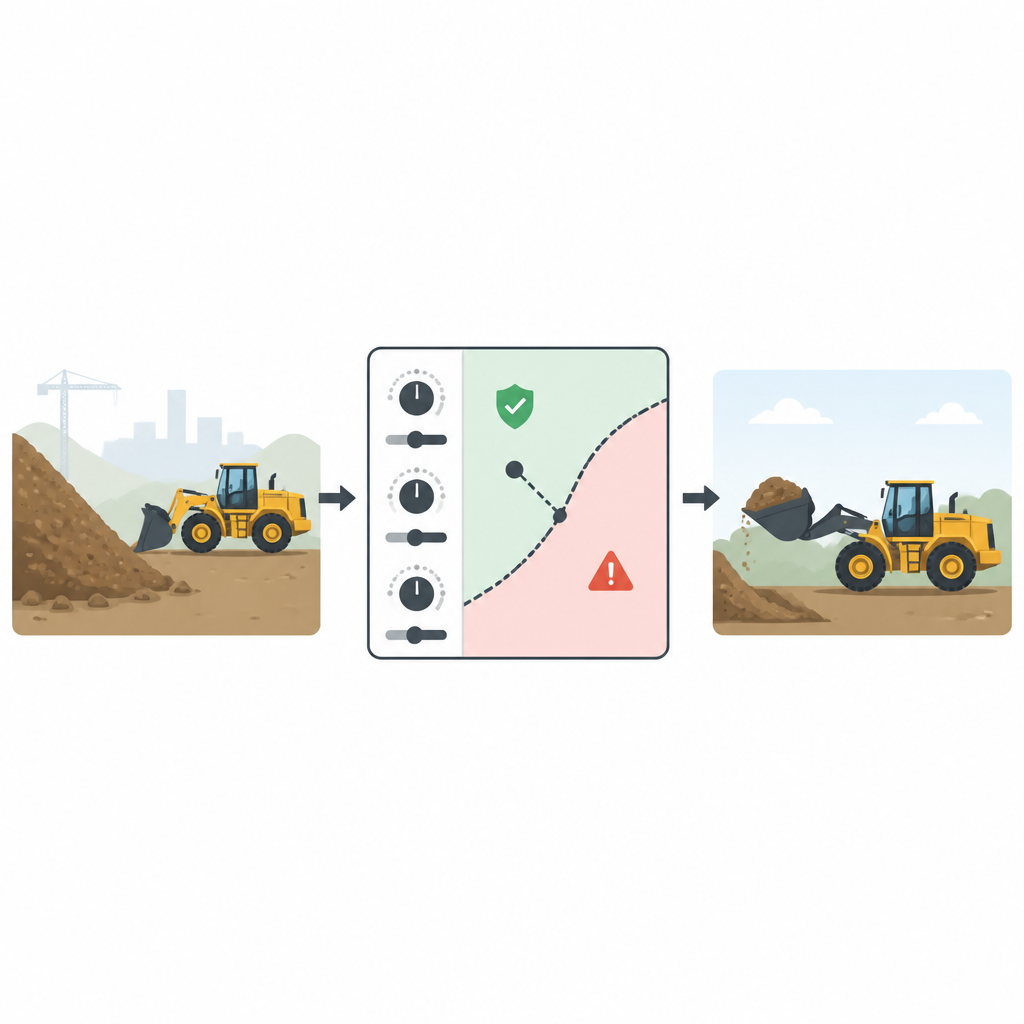
Permettre à l’optimiseur d’explorer prudemment
Dans la seconde étape, les chercheurs réalisent une optimisation bayésienne, une stratégie de sélection des nouveaux essais qui équilibre l’essai de réglages prometteurs et l’exploration des zones incertaines. Ils étendent ici une règle courante de choix du prochain essai pour qu’elle favorise également les réglages présentant une probabilité de sécurité élevée issue de la première étape. Un seul paramètre de pondération contrôle le niveau de prudence de la recherche : une valeur plus grande oriente la recherche vers les parties plus sûres de la carte, tandis qu’une valeur plus petite permet des déplacements plus audacieux près du bord risqué. Il est important de noter que la carte de sécurité construite en amont est maintenue fixe pendant cette phase pour éviter les biais, et que seules les performances de creusage réelles ou simulées sont mises à jour au fur et à mesure des nouveaux essais.
Tester l’idée sur des paysages simples et de la terre virtuelle
Pour vérifier si leur méthode se comporte comme prévu, les auteurs l’appliquent d’abord à un problème jouet où la région sûre réelle et la qualité de chaque réglage sont connues. Leur approche en deux étapes atteint la rapidité des méthodes d’optimisation standard pour trouver des réglages performants, mais avec beaucoup moins d’échecs que les approches qui ignorent la sécurité ou qui cherchent à la garantir au prix d’un calcul lourd. Ils passent ensuite au simulateur de chargeur, où le système doit choisir une vitesse horizontale de creusage et un schéma d’inclinaison de la benne. Les résultats montrent que les événements de glissement dangereux tombent à moins d’environ un essai sur dix, tandis que la quantité de matériau récupérée et l’effort requis restent compétitifs par rapport à des stratégies moins prudentes. Le réglage du poids de sécurité permet aux utilisateurs d’échanger essais risqués occasionnels contre des gains plus rapides, ou inversement. 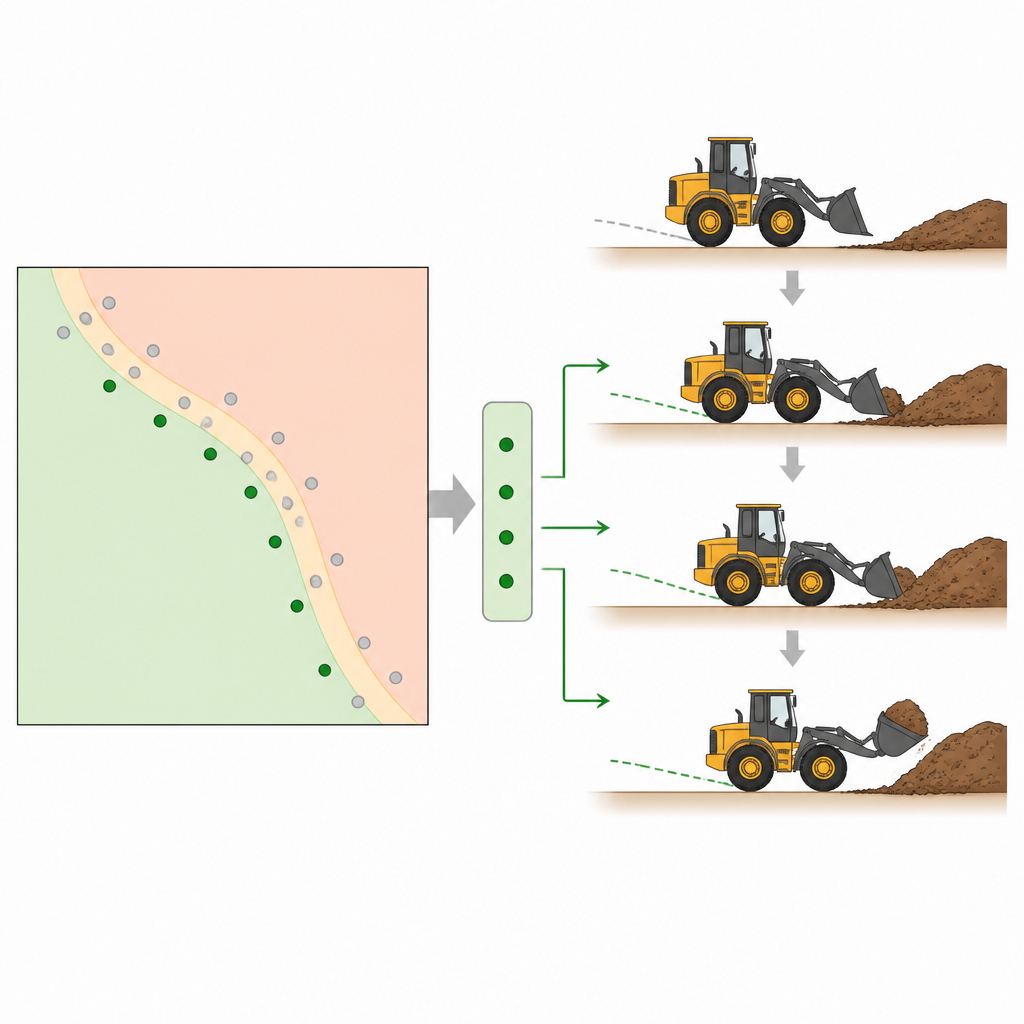
Ce que cela signifie pour les machines réelles
Pour les non-spécialistes, le message principal est que la méthode apprend à un système de creusage automatique non seulement comment creuser efficacement, mais aussi où se trouve la zone dangereuse et comment rester juste à l’intérieur de la limite sûre. En apprenant d’abord une frontière de sécurité en simulation puis en utilisant cette connaissance pour guider le réglage dans le monde réel, l’approche peut réduire le nombre d’expériences risquées nécessaires sur des machines coûteuses. Bien que des travaux complémentaires soient nécessaires pour gérer les différences entre le sol simulé et le sol réel et pour étendre la méthode à un plus grand nombre de paramètres de contrôle, cette stratégie en deux étapes ouvre la voie à des robots de chantier capables d’apprendre efficacement tout en protégeant mieux les personnes et les équipements.
Citation: Koyama, M., Ishikawa, M. Failure-avoidance bayesian optimization with failure-boundary search for automatic exploration of digging control parameters. Sci Rep 16, 15580 (2026). https://doi.org/10.1038/s41598-026-45046-7
Mots-clés: Optimisation bayésienne, excavation automatique, robotique de chantier, commande sûre, chargeur sur pneus