Clear Sky Science · pl
Optymalizacja bayesowska unikająca awarii z wyszukiwaniem granicy niepowodzeń do automatycznego eksplorowania parametrów sterowania kopaniem
Mądrzejsze kopanie na placach budowy jutra
Nowoczesne place budowy opierają się na ciężkich maszynach przemieszczających ogromne ilości ziemi, ale wykorzystanie ich potencjału bez uszkodzeń bywa trudne. Najlepszy sposób nabrania pełnej łyżki często leży tuż obok warunków niebezpiecznych, takich jak poślizg opony czy przeciążenie elementów. W tym badaniu zaprezentowano sposób, w jaki komputer może stroić parametry kopania ładowarki kołowej, aby mogła pracować wydajnie, a jednocześnie trzymać się z dala od strefy zagrożenia.
Dlaczego kopanie jest trudniejsze, niż się wydaje
Obsługa ładowarki kołowej to nie tylko obsługa dźwigni. Gdy łyżka wgryza się w pryzmę, ziemia odpycha w złożony i zmienny sposób. Doświadczeni operatorzy ciągle korygują prędkość i kąt łyżki, aby złapać więcej materiału bez bicia się o obręcz opony czy przeciążania układów hydraulicznych. Dla systemów automatycznego sterowania to trudna równowaga: muszą szukać ustawień zwiększających ilość zgarniętego materiału i oszczędzających paliwo, unikając jednocześnie kombinacji powodujących poślizgi, nadmierne obciążenia czy niestabilny ruch.
Nauczanie komputerów, gdzie nie wolno wjeżdżać
Autorzy rozwiązują ten problem, dzieląc go na dwa etapy. Najpierw korzystają ze szczegółowego symulatora, w którym ładowarka kołowa kopie w pryzmie złożonej z cząstek przypominających skały. W tej bezpiecznej przestrzeni wirtualnej system swobodnie testuje wiele kombinacji prędkości kopania i nachylenia łyżki i zapisuje, czy każde próba była „sukcesem”, czy „porażką”, na przykład częstymi poślizgami opon. Za pomocą metody statystycznej tworzy następnie mapę granicy oddzielającej ustawienia bezpieczne od niebezpiecznych, przypisując prawdopodobieństwo, że każdy punkt w przestrzeni sterowania będzie bezpieczny. Ta mapa uchwytuje, gdzie leży ryzykowna krawędź, bez potrzeby dokładnego modelowania wszystkich zjawisk fizycznych ziemi i maszyny. 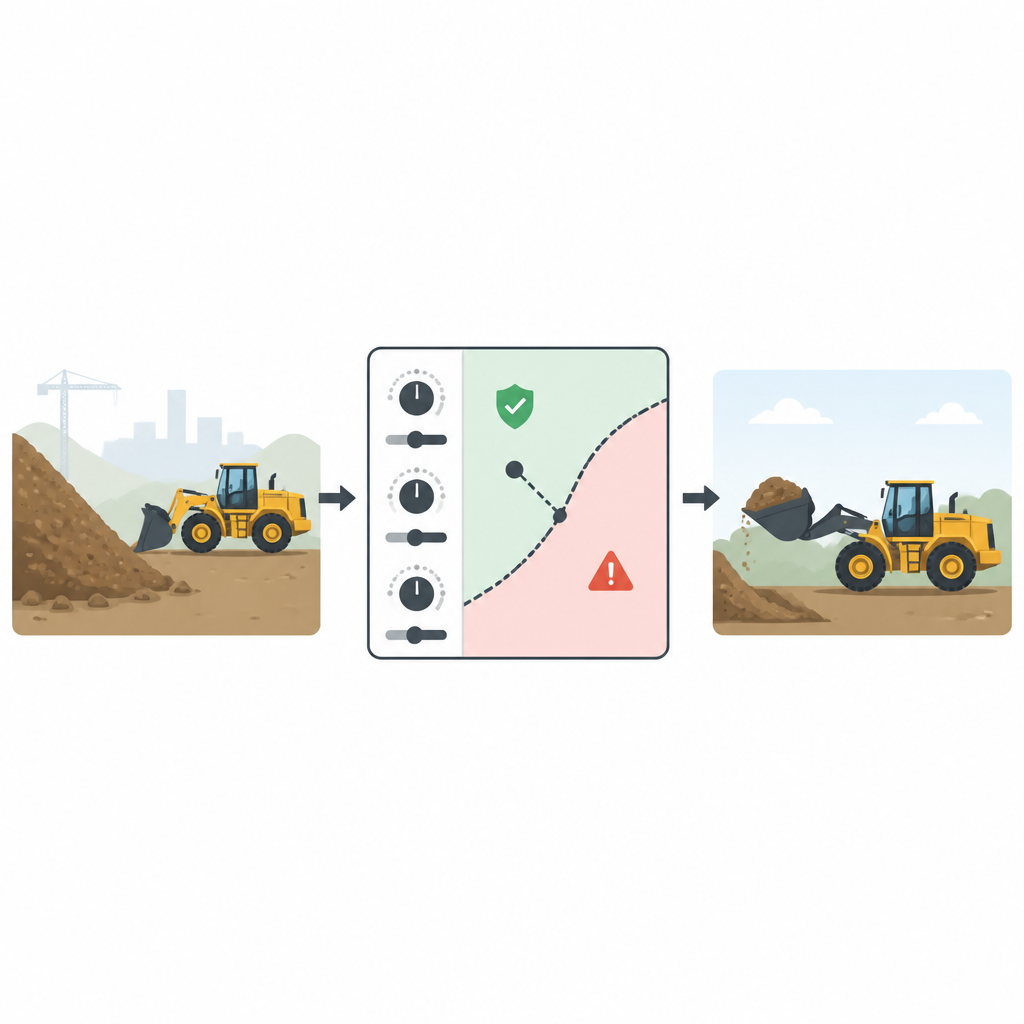
Puszczanie optymalizatora na wędrówkę z rozwagą
W drugim etapie badacze przeprowadzają optymalizację bayesowską — strategię wybierania nowych prób, która równoważy testowanie obiecujących ustawień i eksplorację obszarów niepewnych. Tutaj rozszerzają powszechną zasadę wyboru następnej próby tak, by faworyzowała też ustawienia o wyższym prawdopodobieństwie bezpieczeństwa pochodzącym z pierwszego etapu. Jedna waga kontroluje, jak ostrożne jest przeszukiwanie: większa wartość kieruje badaniem w stronę bezpieczniejszych części mapy, podczas gdy mniejsza pozwala na odważniejsze ruchy bliżej ryzykownej krawędzi. Co ważne, wcześniejsza mapa bezpieczeństwa jest utrzymywana jako stała w czasie tego etapu, by uniknąć uprzedzeń, a aktualizowana jest tylko wydajność kopania w rzeczywistości lub w symulacji, gdy wykonywane są nowe próby.
Testy na prostych krajobrazach i wirtualnej ziemi
Aby sprawdzić, czy ich metoda zachowuje się zgodnie z zamierzeniem, autorzy najpierw stosują ją do zadania zabawkowego, gdzie prawdziwy obszar bezpieczny i jakość każdego ustawienia są znane. Ich podejście dwuetapowe dorównuje szybkości standardowych metod optymalizacji w znajdowaniu wysoko wydajnych ustawień, lecz przy znacznie mniejszej liczbie niepowodzeń niż podejścia, które ignorują bezpieczeństwo lub próbują je gwarantować przy dużych kosztach obliczeniowych. Następnie przechodzą do symulatora ładowarki kołowej, gdzie system musi wybierać poziomą prędkość kopania i schemat nachylenia łyżki. Wyniki pokazują, że niebezpieczne zdarzenia poślizgu spadają do mniej niż około jednego na dziesięć prób, podczas gdy ilość zebranej ziemi i wymagany wysiłek pozostają konkurencyjne wobec mniej ostrożnych strategii. Dostosowanie wagi bezpieczeństwa pozwala użytkownikom wymienić okazjonalne ryzykowne próby na szybsze postępy lub odwrotnie. 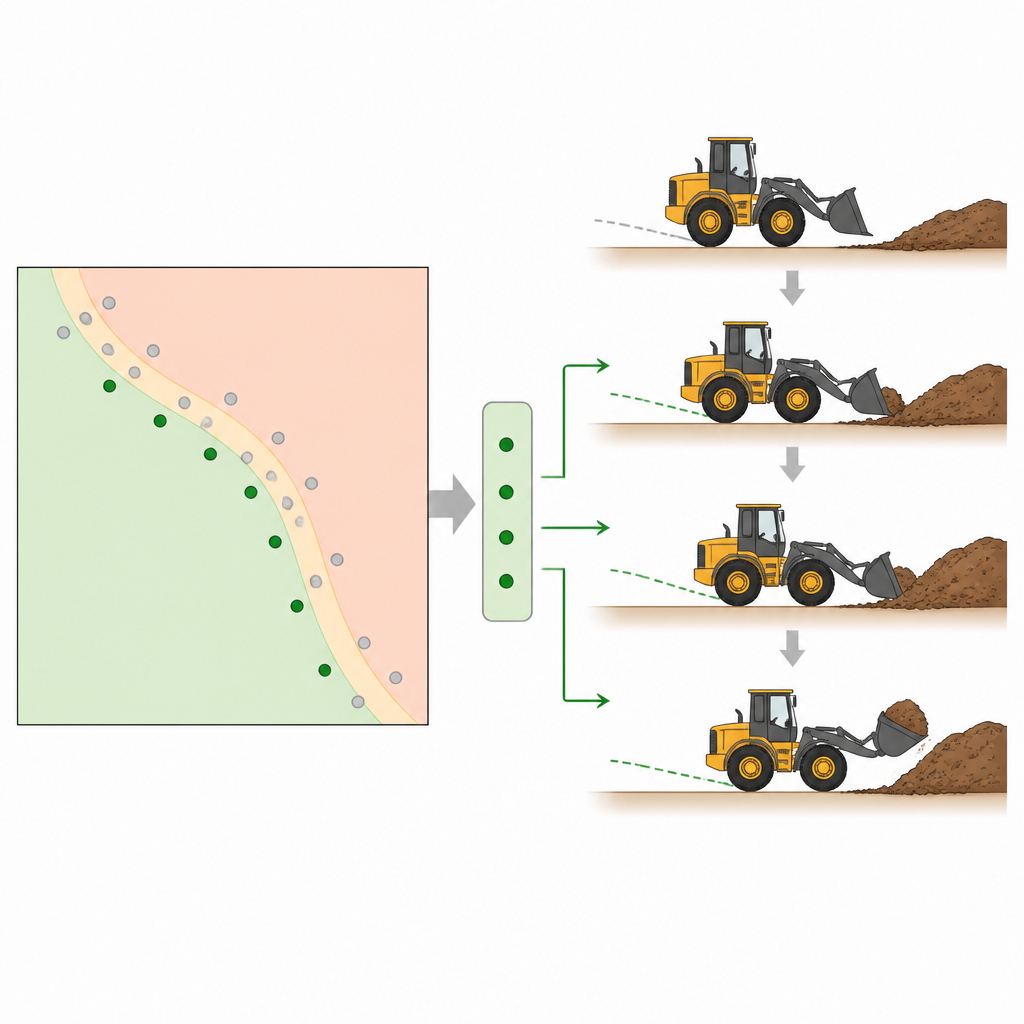
Co to oznacza dla prawdziwych maszyn
Dla osób niebędących specjalistami kluczowy przekaz jest taki, że metoda uczy system automatycznego kopania nie tylko jak kopąć efektywnie, ale też gdzie leży strefa niebezpieczeństwa i jak trzymać się tuż wewnątrz niej. Ucząc najpierw granicy bezpieczeństwa w symulacji, a potem wykorzystując tę wiedzę do kierowania strojenia w rzeczywistości, podejście może zmniejszyć liczbę ryzykownych eksperymentów na drogich maszynach. Chociaż potrzebne są dalsze prace nad radzeniem sobie z różnicami między symulowaną a rzeczywistą ziemią oraz nad skalowaniem do większej liczby ustawień sterowania, ta dwuetapowa strategia wskazuje drogę ku robotom budowlanym, które mogą uczyć się wydajnie, jednocześnie zwiększając bezpieczeństwo ludzi i sprzętu.
Cytowanie: Koyama, M., Ishikawa, M. Failure-avoidance bayesian optimization with failure-boundary search for automatic exploration of digging control parameters. Sci Rep 16, 15580 (2026). https://doi.org/10.1038/s41598-026-45046-7
Słowa kluczowe: optymalizacja bayesowska, automatyczne wykopy, robotyka budowlana, bezpieczne sterowanie, ładowarka kołowa