Clear Sky Science · ar
التحسين البايزي لتجنب الفشل مع بحث عن حدود الفشل للاستكشاف الآلي لمعلمات تحكم الحفر
حفر أذكى في مواقع البناء المستقبلية
تعتمد مواقع البناء الحديثة على آلات ثقيلة تحرك كميات هائلة من التربة، لكن تحقيق أقصى استفادة من هذه الآلات دون إتلافها أمر معقد. أفضل طريقة لملء الدلو كثيرًا غالبًا ما تكون قريبة جدًا من ظروف غير آمنة مثل انزلاق الإطارات أو تحميل أجزاء الماكينة بشكل زائد. تقدم هذه الدراسة طريقة جديدة لأجهزة الحاسوب لضبط كيفية حفر لودر بعجلات بحيث يعمل بقوة مع البقاء بعيدًا عن منطقة الخطر.
لماذا الحفر أصعب مما يبدو
تشغيل لودر بعجلات ليس مجرد تحريك رافعات. عندما يعض الدلو في كومة، تدفع التربة مرة أخرى بطرق معقدة ومتغيرة. يقوم المشغلون البارعون بتعديل السرعة وزاوية الدلو باستمرار لالتقاط المزيد من التربة دون جعل الإطارات تدور أو إجهاد النظام الهيدروليكي. بالنسبة لأنظمة التحكم الآلية، هذا توازن صعب: يجب عليها البحث عن إعدادات تزيد كمية التربة الملتقطة وتوفر الوقود، مع تجنب التركيبات التي تسبب انزلاقًا أو إجهادًا أو حركة غير مستقرة.
تعليم الحواسيب أين لا تذهب
يتعامل المؤلفون مع هذا التحدي بتقسيم المشكلة إلى مرحلتين. أولاً، يستخدمون محاكيًا حاسوبياً مفصلاً للودر وهو يحفر في كومة من جسيمات شبيهة بالصخور. في هذا الفضاء الافتراضي الآمن، يجرب النظام بحرية العديد من تراكيب سرعات الحفر وميل الدلو ويسجل ببساطة ما إذا كانت كل تجربة «ناجحة» أم «فاشلة»، مثل الانزلاقات المتكررة للإطارات. باستخدام طريقة إحصائية، يرسم بعدها خريطة للحد الفاصل الذي يفصل بين الإعدادات الآمنة وغير الآمنة، ويخصّص احتمالًا لكون كل نقطة في فضاء الضوابط آمنة. تلتقط هذه الخريطة مكان الحافة الخطرة دون الحاجة لمعرفة كل فيزياء التربة والماكينة بالتفصيل. 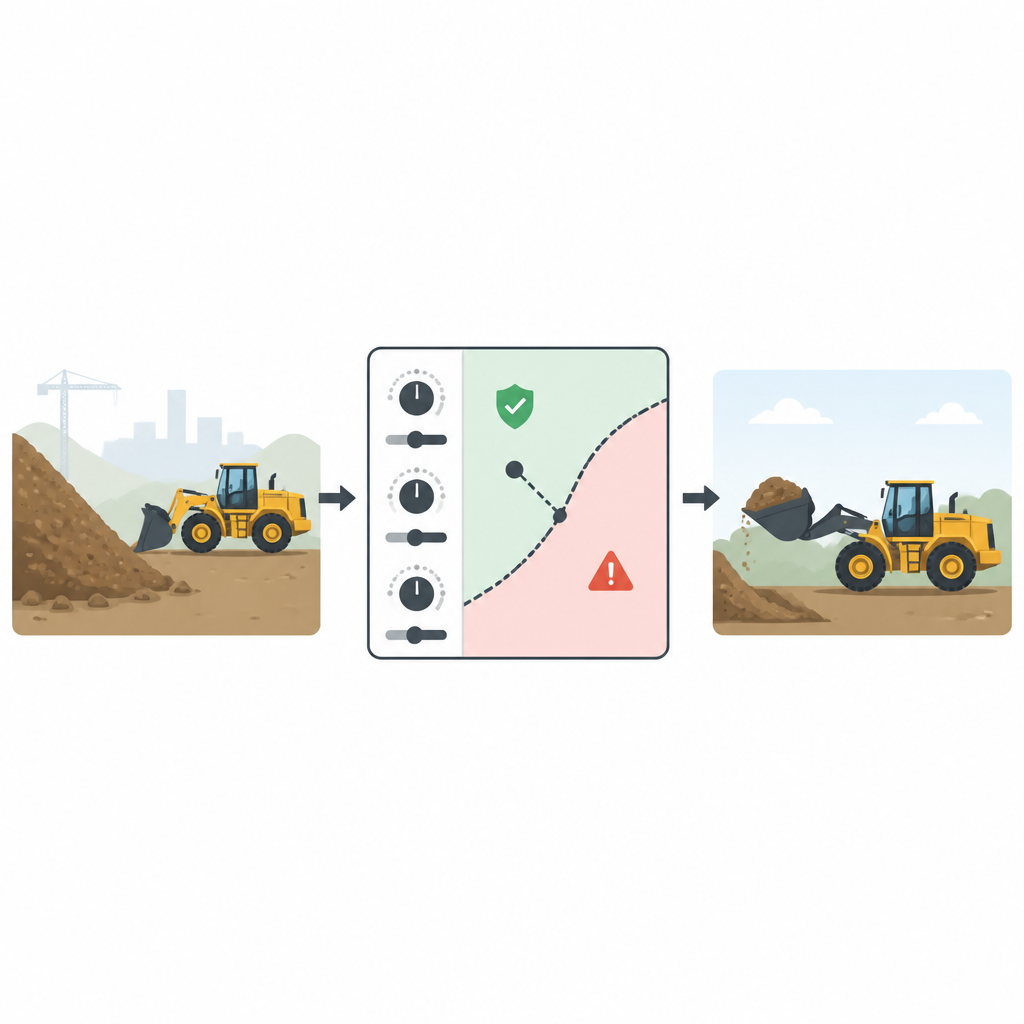
السماح للمُحسّن بالاستكشاف بحذر
في المرحلة الثانية، ينفذ الباحثون تحسينًا بايزيًا، وهي استراتيجية لاختيار تجارب جديدة توازن بين تجربة الإعدادات الواعدة واستكشاف النقاط غير المؤكدة. هنا يوسّعون قاعدة شائعة لاختيار التجربة التالية بحيث تُفضّل أيضًا الإعدادات ذات احتمال السلامة الأعلى المستمد من المرحلة الأولى. يتحكم وزن واحد في مدى الحذر أثناء البحث: قيمة أكبر توجه البحث نحو أجزاء أكثر أمانًا من الخريطة، بينما تسمح قيمة أصغر بتحركات أكثر جرأة قرب الحافة الخطرة. والأهم من ذلك، تُحتفظ خريطة السلامة المبكرة ثابتة خلال هذه المرحلة لتفادي الانحياز، ويتم تحديث أداء الحفر الحقيقي أو المحاكى فقط مع تنفيذ تجارب جديدة.
اختبار الفكرة على مناظِر بسيطة وتربة افتراضية
للتحقق من أن طريقتهم تتصرف كما ينبغي، يطبق المؤلفون أولاً المنهج على مسألة نموذجية حيث تكون المنطقة الآمنة الحقيقية وجودة كل إعداد معروفة. تقارب منهجهم المكوَّن من مرحلتين سرعة أساليب التحسين القياسية في إيجاد إعدادات ذات أداء عالٍ، ولكن مع حالات فشل أقل بكثير من النهج التي تتجاهل السلامة أو تحاول ضمانها بحسابات مكثفة. ثم ينتقلون إلى محاكي اللودر، حيث يجب على النظام اختيار سرعة حفر أفقية ونمط ميل للدلو. تُظهر النتائج أن أحداث الانزلاق غير الآمنة تنخفض إلى أقل من حوالي حالة واحدة من كل عشرة تجارب، بينما تبقى كمية التربة المجمعة والجهد المطلوب قادرة على المنافسة مع استراتيجيات أقل حذرًا. يتيح تعديل وزن السلامة للمستخدمين موازنة التجارب الخطرة العرضية مقابل تحقيق مكاسب أسرع أو العكس. 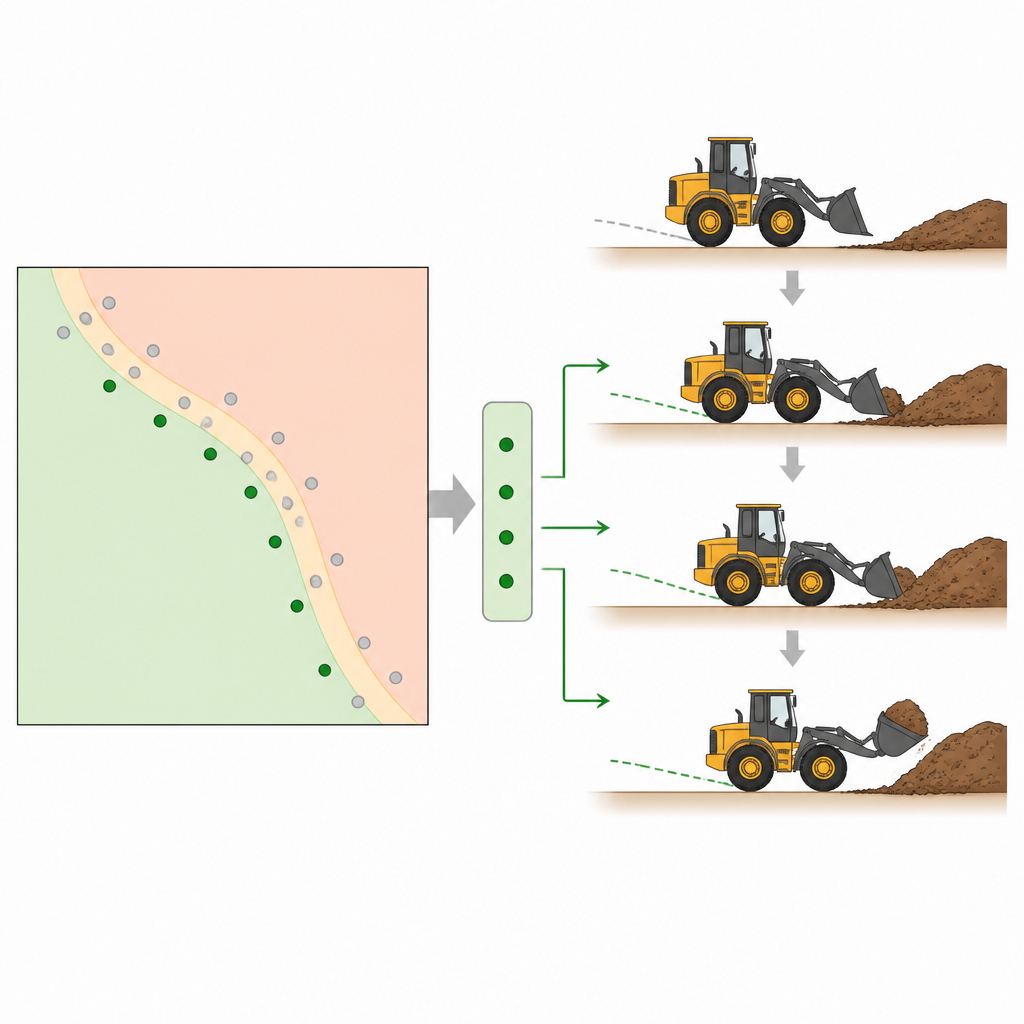
ماذا يعني هذا للآلات الحقيقية
بالنسبة لغير المتخصصين، الرسالة الأساسية هي أن الطريقة تعلم نظام حفر آليًا ليس فقط كيف يحفر جيدًا، بل أيضًا أين تقع منطقة الخطر وكيف يبقى على مقربة آمنة منها. من خلال تعلم حد السلامة أولاً في المحاكاة ثم استخدام تلك المعرفة لتوجيه الضبط في العالم الحقيقي، يمكن أن يقلل النهج عدد التجارب الخطرة المطلوبة على آلات مكلفة. ومع أن هناك حاجة لمزيد من العمل للتعامل مع الاختلافات بين التربة المحاكية والحقيقية ولتوسيع النطاق ليشمل مزيدًا من إعدادات التحكم، فإن هذه الاستراتيجية ذات الخطوتين تشير إلى روبوتات بناء يمكنها التعلم بكفاءة مع الحفاظ على سلامة الأشخاص والمعدات.
الاستشهاد: Koyama, M., Ishikawa, M. Failure-avoidance bayesian optimization with failure-boundary search for automatic exploration of digging control parameters. Sci Rep 16, 15580 (2026). https://doi.org/10.1038/s41598-026-45046-7
الكلمات المفتاحية: التحسين البايزي, الحفر الآلي, روبوتات البناء, التحكم الآمن, لودر بعجلات