Clear Sky Science · ja
失敗回避ベイズ最適化と失敗境界探索による掘削制御パラメータの自動探索
次世代の建設現場で賢く掘る
現代の建設現場では大量の土砂を動かす重機に頼っているが、機械を最大限活用しつつ損傷を避けるのは簡単ではない。バケットを満杯にする最適な掘り方は、タイヤの空転や部品過負荷といった危険な条件のすぐ隣にあることが多い。本研究は、ホイールローダが危険域を避けながら強力に作業できるよう、掘削挙動の調整をコンピュータに学習させる新しい手法を示す。
掘削が見た目より難しい理由
ホイールローダの操作は単にレバーを動かすだけではない。バケットが土塊に入ると、土は複雑で時間変化する力を返す。熟練オペレータは速度やバケット角を絶えず調整し、タイヤが空転したり油圧系に過大な負荷をかけたりしないようにより多くの土をすくい取る。自動制御システムにとっては、収集量や燃料効率を高めつつ、空転や過負荷、不安定な動作を引き起こす組合せを避けるというバランスが難題となる。
行ってはいけない場所をコンピュータに教える
著者らはこの課題に対し問題を二段階に分けて取り組む。まず、岩のような粒子の山に掘り込むホイールローダの詳細なコンピュータシミュレータを用いる。この安全な仮想空間でシステムは掘削速度やバケットの傾斜の多様な組合せを自由に試し、それぞれの試行が「成功」か「失敗」か(例えば頻繁なタイヤ空転など)を記録する。統計的手法を使って、安全な設定と危険な設定を分ける境界の地図を描き、制御空間の各点が安全である確率を割り当てる。この地図は土や機械のすべての物理を詳細に知ることなく、危険の端がどこにあるかを捉える。
最適化器に慎重な探索をさせる
第二段階では、研究者らはベイズ最適化を行う。これは有望な設定の試行と不確実な領域の探索を両立させる試行選択戦略だ。ここでは一般的な次点選択ルールを拡張し、第1段階で得られた安全確率が高い設定を選びやすくする。単一の重みで探索の慎重さを制御でき、重みを大きくすると地図のより安全な部分に探索が向かい、小さくすると危険な端に近い大胆な選択が許される。重要なのは、先に作成した安全地図はこの段階で固定して偏りを避け、実際またはシミュレーションでの掘削性能だけが新たな試行に応じて更新される点である。
単純な地形と仮想の土で手法を試す
手法が意図した通りに動くかを確かめるため、著者らはまず真の安全領域と各設定の品質が既知の簡単な問題に適用した。二段階アプローチは、高性能な設定を見つける速さで標準的な最適化法に匹敵しつつ、安全性を無視する方法や高コストな安全保証法と比べて失敗がはるかに少なかった。その後ホイールローダのシミュレータに移り、ここでは水平掘削速度とバケットの傾斜パターンを選ぶ必要がある。結果は、危険な滑り事象が試行の約十分の一未満に減少し、収集土量や必要努力は慎重性の低い戦略と競合する水準を保った。安全重みを調整することで、時折の危険な試行を許容してより速く成果を得るか、あるいは逆にさらに保守的にするかのトレードオフをユーザが選べる。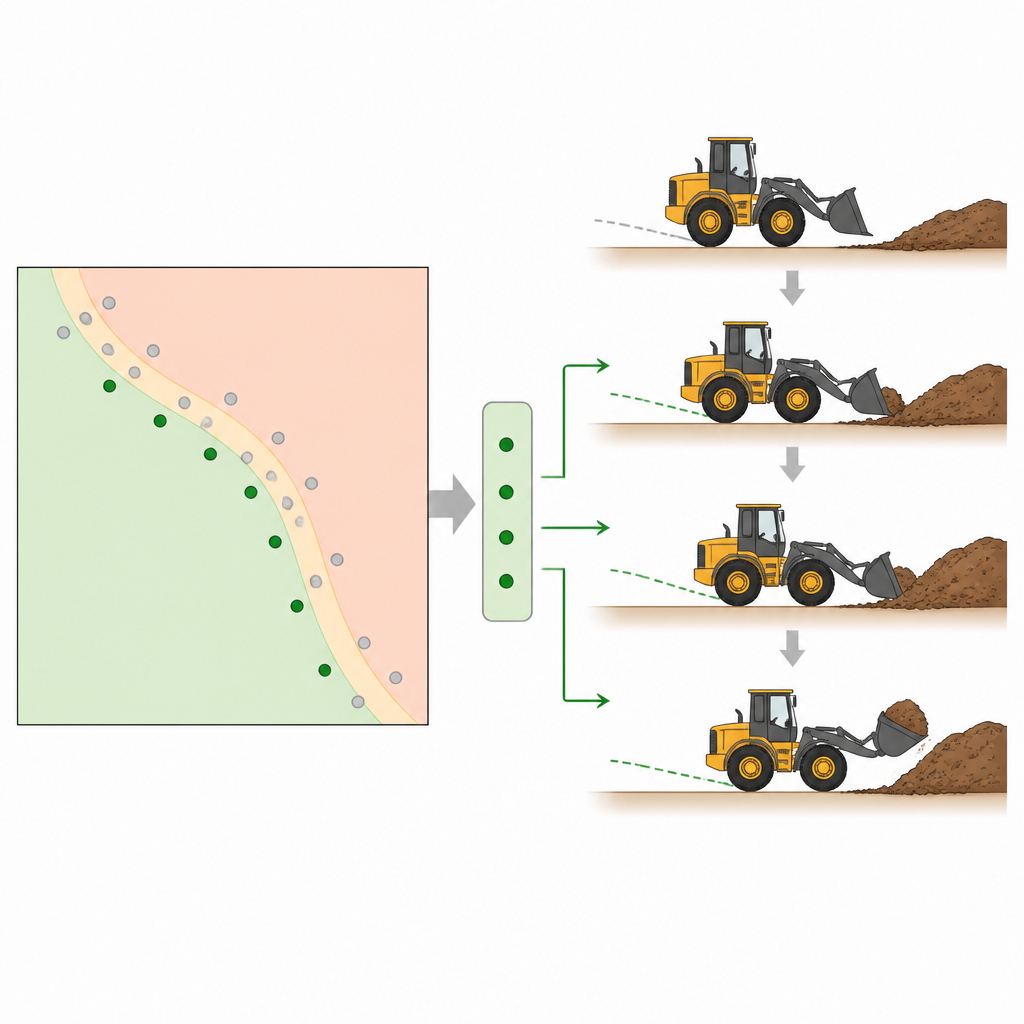
実機への示唆
専門外の読者に向けた要点は、この手法が自動掘削システムに、単にうまく掘る方法を教えるだけでなく、どこが危険域かを学び、その境界の内側にとどまる方法を教える点にある。まずシミュレーションで安全境界を学習し、その知見を実機チューニングの指針に使うことで、高価な機械上で必要な危険な実験の回数を減らせる可能性がある。シミュレーションと実際の土壌の差やより多くの制御設定への拡張を扱うためのさらなる研究は必要だが、この二段階戦略は、効率的に学習しつつ人と機材の安全性を高める建設ロボットへの道を示している。
引用: Koyama, M., Ishikawa, M. Failure-avoidance bayesian optimization with failure-boundary search for automatic exploration of digging control parameters. Sci Rep 16, 15580 (2026). https://doi.org/10.1038/s41598-026-45046-7
キーワード: ベイズ最適化, 自動掘削, 建設ロボティクス, 安全制御, ホイールローダ