Clear Sky Science · ru
Электрически управляемый бистабильный осциллятор на основе жидкокристаллического эластомера
Машины, которые движутся самостоятельно
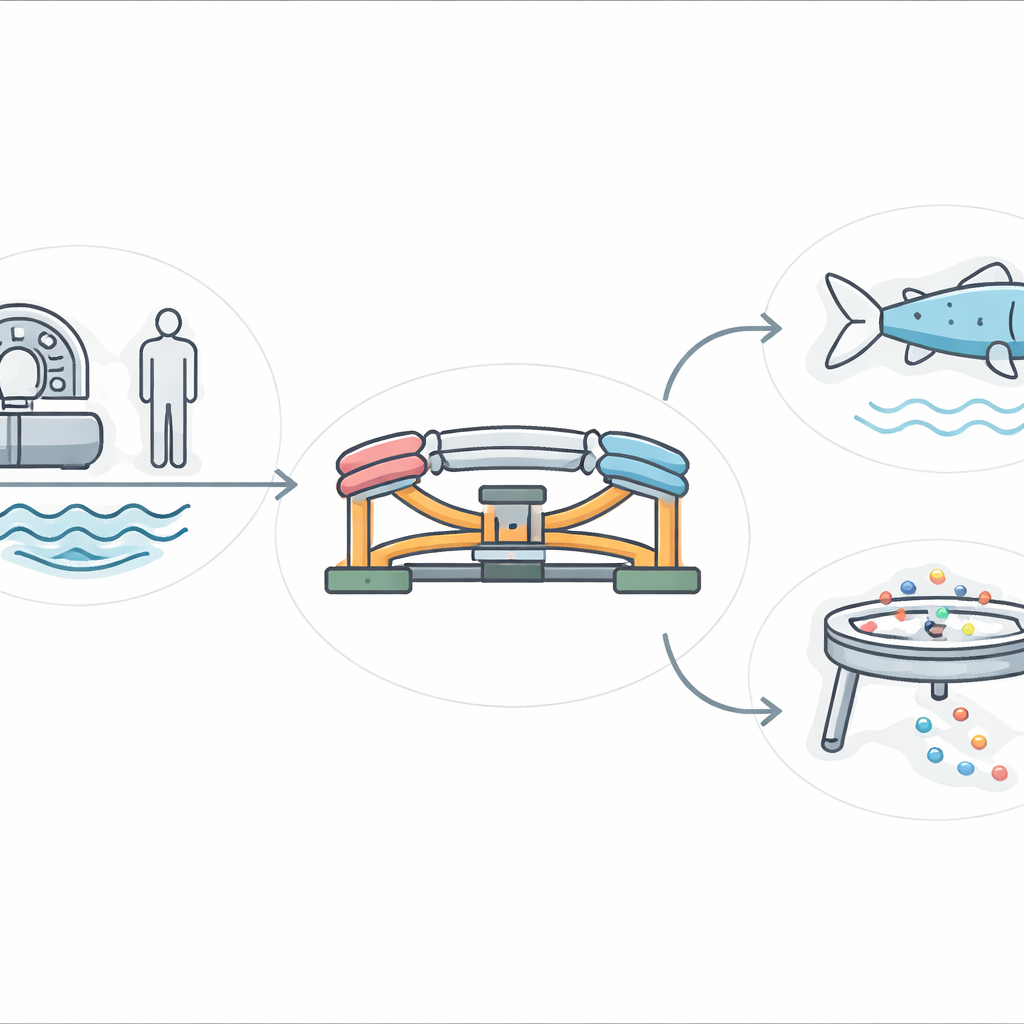
Многие машины, которые поддерживают работу наших фабрик, больниц и лабораторий, полагаются на электрические моторы и электронику, чтобы двигаться туда‑обратно в устойчивом ритме. Но в зонах с сильными магнитными полями, на большой глубине под водой или даже внутри организма та же электроника может оказаться громоздкой, ненадёжной или небезопасной. В этой работе представлен новый тип саморитмичного механического «сердца» из мягких резиноподобных материалов, способного колебаться самостоятельно при подключении только простой батареи, что открывает путь к более умным и устойчивым устройствам, работающим там, где традиционные моторы испытывают трудности.
Мягкий двигатель с двумя положениями покоя
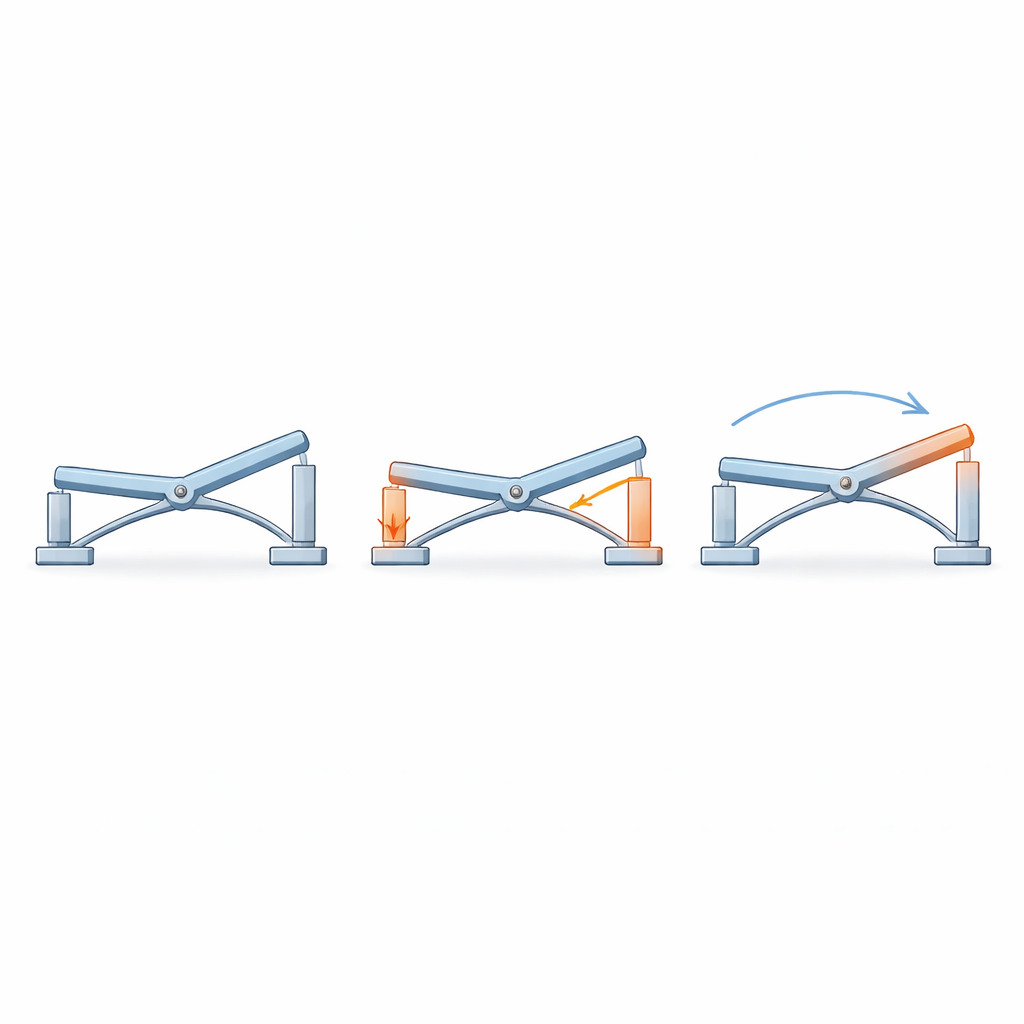
В основе работы лежит небольшой механический прибор — бистабильный осциллятор, имеющий не одно, а два предпочтительных положения покоя. Авторы собирают его вокруг центрального качающегося бруска, подпертого двумя предварительно изогнутыми пластиковыми балками, как крошечные качели между гибкими пружинами. По обе стороны от бруска прикреплены полоски специального материала — жидкокристаллического эластомера, который ведёт себя отчасти как искусственная мышца: при электрическом нагреве он укорачивается, при охлаждении расслабляется и удлиняется. Скользящий контакт под устройством служит чисто механическим переключателем, определяющим, какая сторона получает питание в данный момент. Вместе эти элементы образуют замкнутый цикл, где движение и нагрев постоянно взаимно стимулируют друг друга без цифрового контроллера.
Как мягкие «мышцы» приводят систему в движение
Когда одна полоска жидкокристаллического эластомера нагревается при низком постоянном напряжении, она медленно сокращается и тянет качалку в свою сторону. По мере наклона качалки предварительно изогнутые балки изгибаются и накапливают упругую энергию, подобно заводной пружине. Как только достигается критический угол, балки внезапно «переворачиваются» в противоположную форму, быстро освобождая накопленную энергию и мощным движением переводя качалку в другое устойчивое положение. Это резкое переключение также смещает скользящий контакт, так что питание отключается от первой полоски и подаётся на противоположную. Процесс затем повторяется в обратном порядке: новая подключённая полоска нагревается и сокращается, снова накапливает энергию в балках и вызывает очередной быстрый переход. Таким образом, равномерный вход постоянного тока автоматически преобразуется в колебательное движение и импульсный электрический сигнал, полностью управляемые механикой устройства.
Настройка силы, скорости и долговечности
Исследователи тщательно изучили поведение искусственных мышц и несущей конструкции. Меняя подаваемое напряжение, они показали, что полоски жидкокристаллического эластомера способны обеспечивать большие обратимые сокращения и силы, достаточные для надёжного запуска «переворота», не повреждая балки. Компьютерное моделирование помогло выбрать оптимальную длину, толщину и жёсткость изогнутых пластиковых балок так, чтобы устройство имело два устойчивых состояния с хорошо определённым энергетическим барьером между ними. В экспериментах осциллятор сохранял угол качания и период на протяжении многих циклов с лишь незначительными изменениями, что свидетельствует о хорошей долговечности. Авторы также исследовали, как напряжение и толщина плёнки влияют на время нагрева и охлаждения: более высокое напряжение и более толстые плёнки сокращают фазу нагрева, в то время как охлаждение остаётся сравнительно медленным и в итоге ограничивает максимальную частоту. Это понимание даёт правила проектирования для настройки того, как быстро и с какой силой будет двигаться осциллятор.
От роборуб до саморазделяющихся машин
Чтобы продемонстрировать возможности этого мягкого двигателя, команда собрала небольшую роботизированную рыбку, где осциллятор приводил в движение гибкий хвост. Крошечная батарея внутри 3D-печатного корпуса обеспечивала постоянную подачу энергии, а механизм «переворота» превращал медленный нагрев в резкие взмахи хвоста в воде. Видеоанализ показал, что рыба продвигалась скачкообразно: долгие паузы, пока энергия накапливалась, за которыми следовали резкие всплески движения при срабатывании хвоста. Далее исследователи связали два осциллятора так, чтобы они поочерёдно срабатывали в зеркальном режиме, используя исключительно хитрое расположение механических переключателей и проводов. Наконец, они собрали три осциллятора под перфорированным диском с смешанными шариками двух размеров. Сдвинутые по фазе вибрации направляли меньшие шарики через отверстия, оставляя большие позади, что позволило выполнить автоматическую сортировку по размеру без датчиков и микросхем.
Почему это важно для будущих «умных» устройств
Работа демонстрирует возможность создания компактных, низковольтных и высококооперативных механических систем, которые «думают» своей структурой, а не электроникой. Комбинируя мягкие искусственные мышцы с продуманной формой балок и простыми скользящими контактами, авторы создают осциллятор, эффективно накапливающий и высвобождающий энергию, устойчивый к электромагнитным помехам и пригодный для последовательного объединения в более сложные механизмы, такие как плавание и сортировка. Проще говоря, они демонстрируют новый способ создания машин, которые движутся и координируют свои действия за счёт собственной геометрии и свойств материалов. Такие механически интеллектуальные системы в перспективе могут приводить в действие мягких роботов, медицинские инструменты и промышленные устройства, которым необходимо безопасно и надёжно работать в условиях, недоступных для традиционных моторов и управляющей электроники.
Цитирование: Liu, H., Yan, B., Zhou, R. et al. An electrically controlled bistable oscillator based on liquid crystal elastomer. npj Soft Matter 2, 10 (2026). https://doi.org/10.1038/s44431-026-00026-9
Ключевые слова: мягкая робототехника, искусственные мышцы, механические осцилляторы, жидкокристаллические эластомеры, управление без электроники