Clear Sky Science · fr
Un oscillateur bistable commandé électriquement à base d’élastomère à cristaux liquides
Des machines qui se déplacent seules
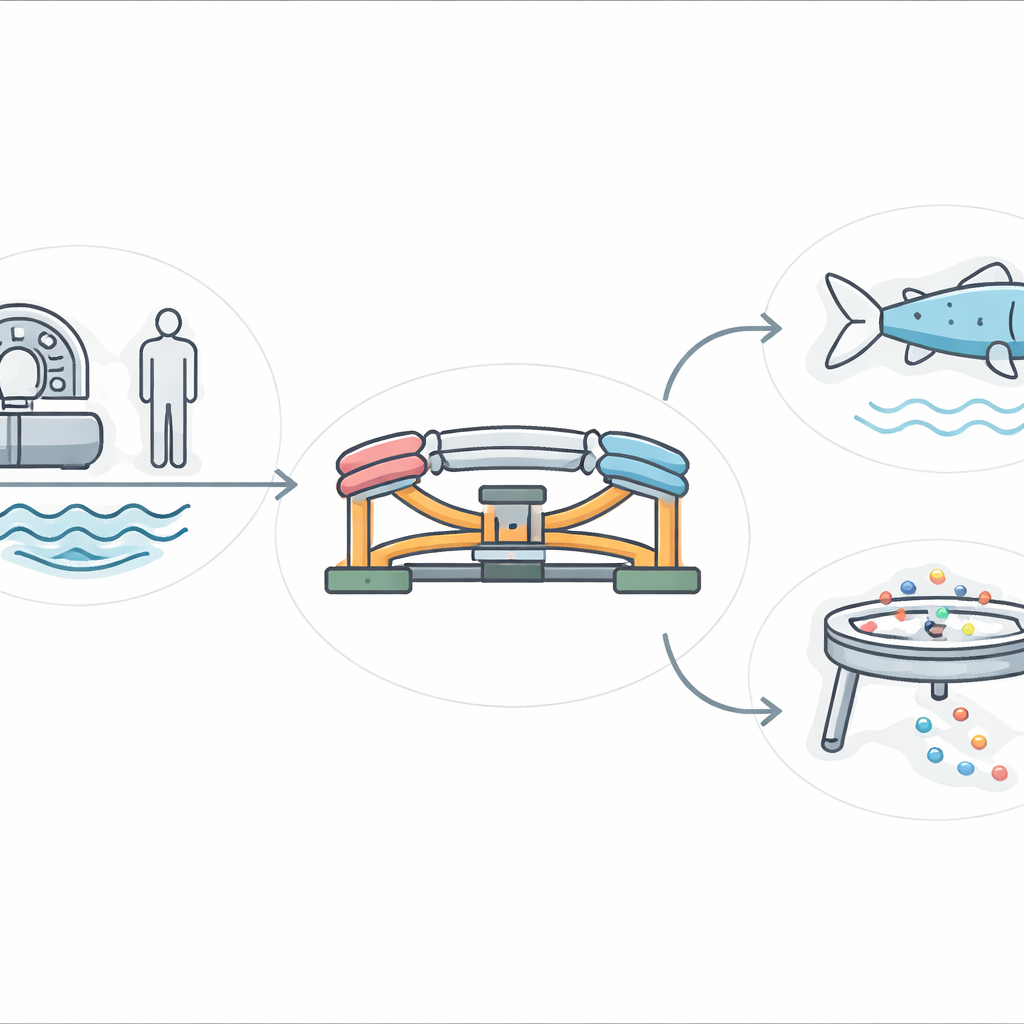
Beaucoup des machines qui font fonctionner nos usines, hôpitaux et laboratoires s’appuient sur des moteurs électriques et de l’électronique pour osciller avec un rythme régulier. Mais dans des environnements soumis à de forts champs magnétiques, en haute mer ou même à l’intérieur du corps, ces mêmes électroniques deviennent encombrantes, peu fiables ou dangereuses. Cette étude présente un nouveau type de « cœur » mécanique auto-oscillant fabriqué à partir de matériaux souples et élastiques pouvant osciller de façon autonome avec pour seul apport une batterie simple, ouvrant la voie à des dispositifs plus intelligents et résistants capables de fonctionner là où les moteurs conventionnels peinent.
Un moteur souple à deux positions d’équilibre
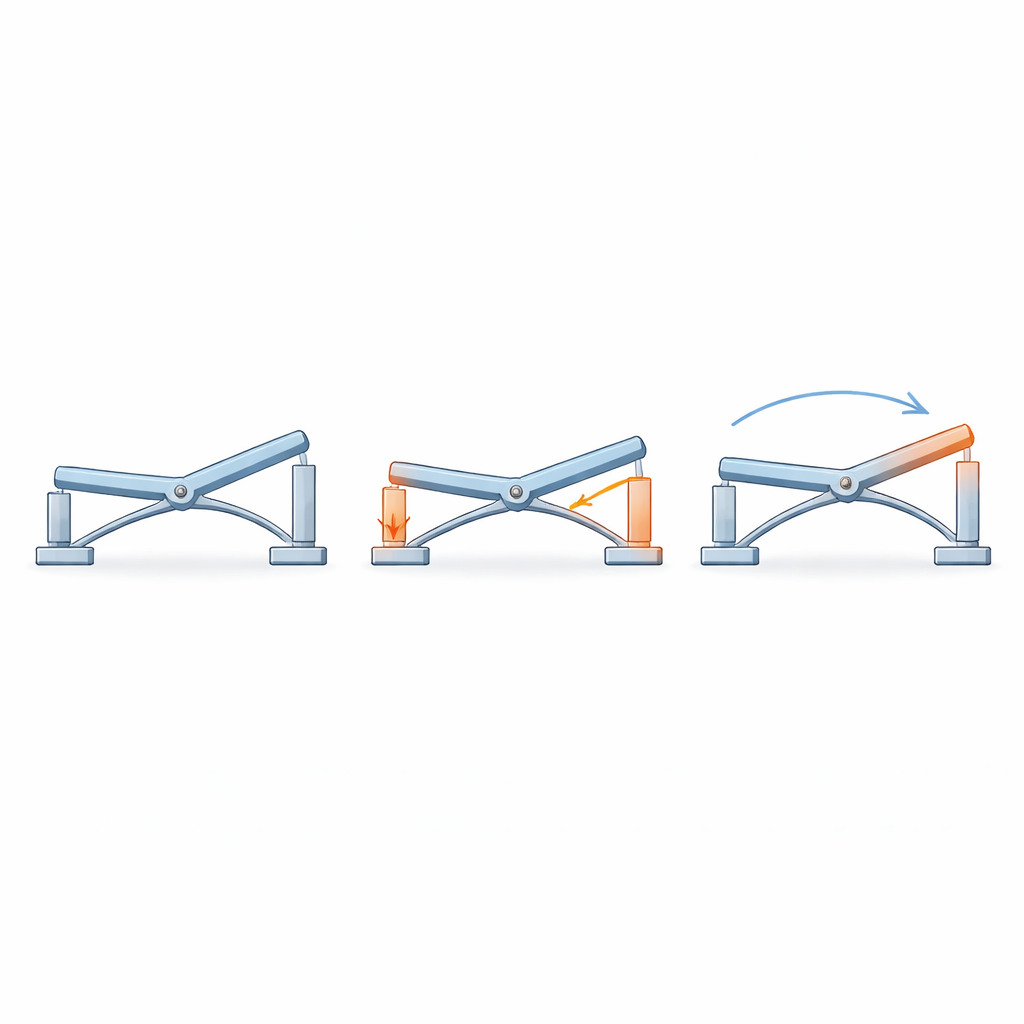
Au cœur du dispositif se trouve un petit mécanisme appelé oscillateur bistable, qui possède deux positions d’équilibre préférentielles au lieu d’une. Les auteurs construisent cet appareil autour d’une barre oscillante centrale soutenue par deux poutres plastiques pré-courbées, un peu comme une bascule miniature retenue entre des ressorts flexibles. De chaque côté de la barre, ils fixent une bande d’un matériau spécial appelé élastomère à cristaux liquides, qui se comporte comme un muscle artificiel : chauffé électriquement, il se contracte ; refroidi, il se détend et s’allonge. Un contact coulissant en dessous joue le rôle d’un interrupteur purement mécanique qui décide quel côté est alimenté à un instant donné. Ensemble, ces éléments forment une boucle fermée où mouvement et chauffage s’entretiennent mutuellement sans contrôleur numérique.
Comment les muscles souples font cliquer le système
Lorsque l’une des bandes de cristal liquide est chauffée par une faible tension continue, elle se contracte lentement et attire la bascule de son côté. À mesure que la bascule s’incline, les poutres pré-courbées se déforment et emmagasinent de l’énergie élastique, comme lorsqu’on remonte un ressort. Une fois qu’un angle critique est atteint, les poutres basculent soudainement vers l’autre configuration, libérant leur énergie emmagasinée dans un mouvement rapide et puissant qui fait passer la bascule à l’autre position stable. Ce changement rapide déplace aussi le contact coulissant de sorte que l’alimentation est coupée pour la première bande et fournie à la bande opposée. Le processus se répète ensuite en sens inverse : la bande désormais alimentée chauffe et se contracte, accumule de l’énergie dans les poutres et provoque une nouvelle bascule. De cette manière, une entrée en courant continu stable se transforme automatiquement en un mouvement d’avant en arrière et en un signal électrique pulsé, le tout régulé par la mécanique intrinsèque de l’appareil.
Ajuster la puissance, la vitesse et l’endurance
Les chercheurs ont testé avec soin le comportement des muscles artificiels et de la structure porteuse. En variant la tension d’alimentation, ils ont montré que les bandes de cristaux liquides peuvent fournir de fortes contractions réversibles et des forces suffisantes pour déclencher la bascule sans endommager les poutres. Des simulations numériques les ont aidés à choisir la bonne longueur, l’épaisseur et la rigidité des poutres plastiques courbées afin que le dispositif présente deux états stables séparés par une barrière d’énergie bien définie. Les expériences ont révélé que l’oscillateur pouvait maintenir son angle d’oscillation et sa période sur de nombreux cycles avec des changements mineurs, démontrant une bonne durabilité. Ils ont aussi cartographié comment la tension et l’épaisseur du film contrôlent les temps de chauffage et de refroidissement : une tension plus élevée et des films plus épais raccourcissent la phase de chauffage, tandis que le refroidissement reste comparativement lent, limitant en fin de compte la fréquence maximale. Cette compréhension fournit des règles de conception pour régler la rapidité et l’amplitude des mouvements de l’oscillateur.
Du poisson robotique aux machines qui trient seules
Pour illustrer les capacités de ce moteur souple, l’équipe a construit un petit poisson robotique entraîné par l’oscillateur actionnant une queue flexible. Une minuscule batterie logée dans le corps imprimé en 3D fournissait une puissance constante, tandis que le mécanisme de basculement transformait le chauffage lent en coups secs de la queue dans l’eau. L’analyse vidéo a montré que le poisson avançait par à-coups : de longues pauses pendant l’accumulation d’énergie, suivies de brusques poussées lors du basculement de la queue. Ensuite, les chercheurs ont relié deux oscillateurs pour qu’ils basculent à tour de rôle en miroir, uniquement grâce à une organisation astucieuse d’interrupteurs mécaniques et de fils. Enfin, ils ont assemblé trois oscillateurs sous un disque perforé contenant des billes de deux tailles. Les vibrations en décalage de phase ont guidé les petites billes à travers les trous tout en laissant les plus grosses derrière, réalisant un tri automatique par taille sans capteurs ni puces.
Pourquoi cela compte pour les dispositifs intelligents de demain
Ce travail montre qu’il est possible de concevoir des systèmes mécaniques compacts, basse tension et hautement coopératifs qui « réfléchissent » par leur structure plutôt que par l’électronique. En combinant des muscles artificiels souples avec des poutres habilement façonnées et de simples contacts coulissants, les auteurs créent un oscillateur qui stocke et relâche l’énergie efficacement, résiste aux interférences électromagnétiques et peut être chaîné pour accomplir des tâches complexes comme la nage ou le tri. En termes clairs, ils démontrent une nouvelle façon de fabriquer des machines qui se meuvent et se coordonnent seules, en s’appuyant uniquement sur leur géométrie et leurs propriétés matérielles. De tels systèmes mécaniquement intelligents pourraient un jour alimenter des robots mous, des outils médicaux et des dispositifs industriels devant fonctionner en toute sécurité et fiabilité là où les moteurs et circuits de commande traditionnels ne conviennent pas.
Citation: Liu, H., Yan, B., Zhou, R. et al. An electrically controlled bistable oscillator based on liquid crystal elastomer. npj Soft Matter 2, 10 (2026). https://doi.org/10.1038/s44431-026-00026-9
Mots-clés: robotique molle, muscles artificiels, oscillateurs mécaniques, élastomères à cristaux liquides, commande sans électronique