Clear Sky Science · es
Un oscilador biestable controlado eléctricamente basado en elastómero de cristal líquido
Máquinas que se mueven solas
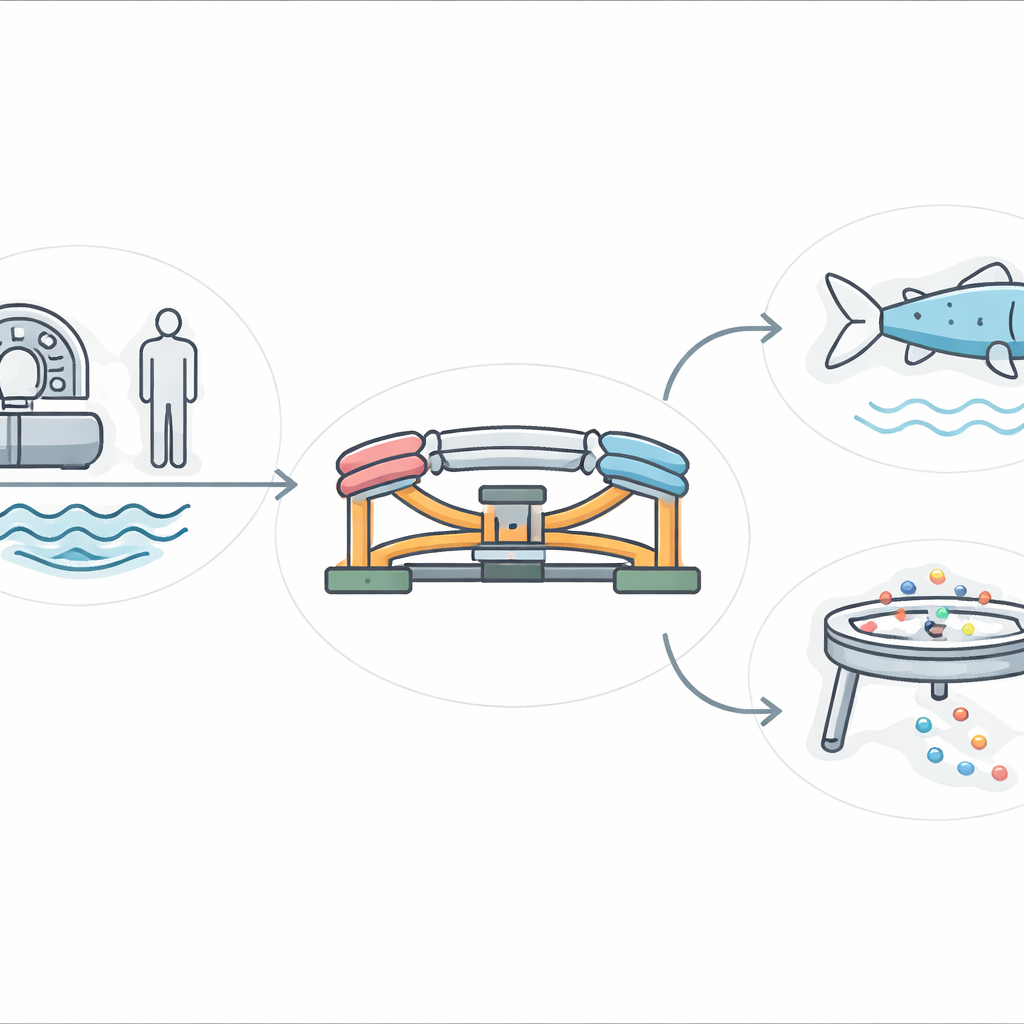
Muchas de las máquinas que mantienen en funcionamiento nuestras fábricas, hospitales y laboratorios dependen de motores eléctricos y electrónica para moverse de un lado a otro con un ritmo constante. Pero en entornos con campos magnéticos intensos, a grandes profundidades marinas o incluso dentro del cuerpo, esa misma electrónica puede volverse voluminosa, poco fiable o insegura. Este estudio presenta un nuevo tipo de “corazón” mecánico autooscilante hecho de materiales blandos y elásticos que puede oscilar por sí mismo usando únicamente una batería simple, abriendo la puerta a dispositivos más inteligentes y resistentes que funcionen allí donde los motores convencionales fallan.
Un motor blando con dos posiciones de reposo
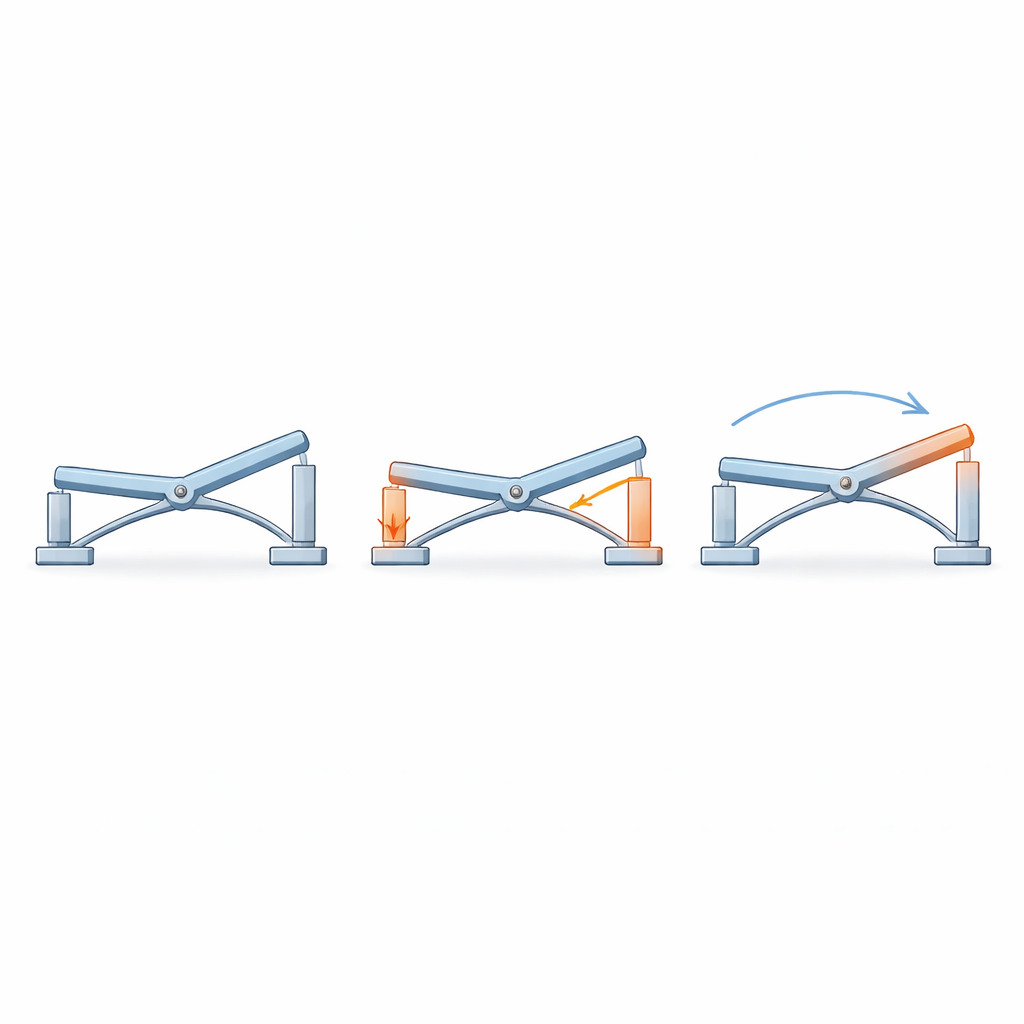
En el núcleo del trabajo hay un pequeño dispositivo mecánico llamado oscilador biestable, que tiene dos posiciones de reposo preferidas en lugar de una. Los autores construyen este dispositivo alrededor de una barra basculante central apoyada por dos vigas plásticas precurvadas, como un minúsculo balancín sujeto entre resortes flexibles. En cada lado de la barra fijan una tira de un material especial conocido como elastómero de cristal líquido, que actúa algo así como un músculo artificial: al calentarse eléctricamente se contrae; al enfriarse se relaja y se alarga. Un contacto deslizante situado debajo actúa como un interruptor puramente mecánico que decide qué lado recibe energía en cada momento. Juntos, estos elementos forman un bucle cerrado donde el movimiento y el calentamiento se impulsan mutuamente sin necesidad de un controlador digital.
Cómo los músculos blandos hacen que el sistema funcione
Cuando una de las tiras de cristal líquido se calienta con un voltaje bajo y constante, se contrae lentamente y tira de la palanca hacia su lado. A medida que la palanca se inclina, las vigas precurvadas se doblan y almacenan energía elástica, de forma similar a enrollar un resorte. Al alcanzarse un ángulo crítico, las vigas efectúan un cambio brusco a la forma opuesta, liberando la energía almacenada en un movimiento rápido y potente que voltea la palanca hacia la otra posición estable. Este cambio rápido también desplaza el contacto deslizante para cortar la alimentación de la primera tira y suministrarla a la contraria. El proceso se repite luego a la inversa: la tira recién alimentada se calienta y se contrae, acumula energía en las vigas y provoca otro cambio brusco. De este modo, una entrada de corriente continua constante se convierte automáticamente en movimiento de vaivén y en una señal eléctrica pulsada, todo gobernado por la propia mecánica del dispositivo.
Ajustar fuerza, velocidad y resistencia
Los investigadores probaron cuidadosamente cómo se comportan los músculos artificiales y la estructura de soporte. Variando el voltaje de accionamiento, mostraron que las tiras de cristal líquido pueden ofrecer grandes contracciones reversibles y fuerzas suficientes para desencadenar el cambio brusco sin dañar las vigas. Simulaciones por ordenador les ayudaron a seleccionar la longitud, el espesor y la rigidez adecuados de las vigas plásticas curvadas para que el dispositivo presentase dos estados estables con una barrera de energía bien definida entre ellos. Los experimentos revelaron que el oscilador podía mantener su ángulo de oscilación y periodo durante muchos ciclos con cambios menores, demostrando buena durabilidad. También mapearon cómo el voltaje y el grosor de la película controlan los tiempos de calentamiento y enfriamiento: voltajes más altos y películas más gruesas acortan la fase de calentamiento, mientras que el enfriamiento permanece comparativamente lento, limitando en última instancia la frecuencia máxima. Este entendimiento proporciona reglas de diseño para ajustar la rapidez y la intensidad del movimiento del oscilador.
De peces robóticos a máquinas que se autoordenan
Para mostrar lo que puede hacer este motor blando, el equipo construyó un pequeño pez robótico con el oscilador impulsando una cola flexible. Una diminuta batería dentro del cuerpo impreso en 3D suministró energía constante, mientras el mecanismo de cambio brusco transformaba el calentamiento lento en sacudidas agudas de la cola en el agua. El análisis de vídeo mostró que el pez avanzaba de forma escalonada: largas pausas mientras se acumulaba energía, seguidas de estallidos repentinos de movimiento cuando la cola hacía el cambio. A continuación, los investigadores conectaron dos osciladores para que se turnaran en los cambios en forma de imagen especular, únicamente mediante una disposición ingeniosa de contactos mecánicos e hilos. Finalmente, montaron tres osciladores bajo un disco perforado que sostenía bolas mixtas de dos tamaños. Las vibraciones con desfase guiaron las bolas más pequeñas a través de los orificios mientras las más grandes quedaban atrás, logrando una clasificación automática por tamaño sin sensores ni microchips.
Por qué esto importa para futuros dispositivos inteligentes
Este trabajo demuestra que es posible construir sistemas mecánicos compactos, de bajo voltaje y altamente cooperativos que «piensen» con su estructura en lugar de con electrónica. Al combinar músculos artificiales blandos con vigas de forma ingeniosa y simples contactos deslizantes, los autores crean un oscilador que almacena y libera energía de forma eficiente, resiste la interferencia electromagnética y puede encadenarse para tareas complejas como nadar y clasificar. En términos sencillos, demuestran una nueva manera de fabricar máquinas que se mueven y se coordinan por sí mismas, usando únicamente su geometría y las propiedades de sus materiales. Tales sistemas mecánicamente inteligentes podrían, eventualmente, impulsar robots blandos, herramientas médicas y dispositivos industriales que deben operar de forma segura y fiable en lugares donde los motores tradicionales y los circuitos de control no pueden hacerlo.
Cita: Liu, H., Yan, B., Zhou, R. et al. An electrically controlled bistable oscillator based on liquid crystal elastomer. npj Soft Matter 2, 10 (2026). https://doi.org/10.1038/s44431-026-00026-9
Palabras clave: robótica blanda, músculos artificiales, osciladores mecánicos, elastómeros de cristal líquido, control sin electrónica